- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
详解与公用电网相连的逆变器在建模与控制方面电路设计
录入:edatop.com 点击:
本文介绍了并网逆变器的建模与控制,讨论了各个领域的先进技术,并详细阐述了最适用的技术。本文所提到的技术既可用于单相和三相逆变器,也可用于三相逆变器中的任意级数。本文对电网同步、防孤岛控制、电流调节算法、PWM生成技术和独立逆变器控制等内容进行了探讨,并以数字控制格式提出了控制算法;该格式适用于使用数字信号处理器的嵌入式控制。
据全球风能协会数据显示,2006年全球风力发电厂总发电量已达22,199 GWh,比2005年增长了6.48%。这说明风力发电量已能满足总需求电量的9%。然而,大多数可替代能源系统都无法提供稳定的能源。在一天之内,风速、太阳辐射照度、水流速度可能会发生很大的变化。需要一个稳定的电网接口来过滤可再生能源的波动,为用户提供可靠的电力。大多数可再生能源都连接到电网,能源的源端大多以直流电的形式存在。太阳能光伏电池可提供直流电压,中小型风力发电机能够输出交流电,这些交流电随后可转换成直流电。借助逆变器,可以将直流电能转换为交流电能。直流端的控制目标是捕捉到最大的能量,并将其传输到公用电网中。产生的交流电能,必须能兼容交流公用电网中逆变器与公用电网连接点处的电能。
如此多的分布式系统广泛渗透到公用电网中,带来了许多问题。如果以不规范的方式接入公用电网,则可能影响电能的质量并威胁维护人员或系统用户的安全。目前,有关方面已制定出多项标准来约束并网逆变器与电网的连接。
并网逆变器的共同特性是具有一种特定的算法,可最大限度增加从可再生能源中提取的电能。在太阳能光伏系统中,这通常是指最大功率点跟踪(MPPT)技术。风力发电机组也同样寻求能量捕捉的最大化,但这通常需要强制涡轮以最大的气动效率工作才能实现。从理论上来说,这是一种MPPT技术,但它涉及的并不仅仅是并网逆变器。太阳能光伏系统的最大功率点跟踪技术
典型的太阳能光伏系统由一个太阳能光电板阵列组成。太阳能光电板能够将太阳光转换为直流电能;直流电能的强度与到达太阳能光电板的太阳辐照度成正比。借助逆变器,可以将直流电能转换为交流电能。可用的太阳能数量与辐照度、温度和光电板的新旧程度有关,因此,如未测量太阳的辐照度和光电板的温度,很难对可用的太阳能数量进行估算。传感元件会增加额外的成本。即便应用了传感元件,估算的值也不精确。阳光经常被遮挡住,这会影响光电板阵列的性能。另外,光电板的新旧程度也会影响它的性能。逆变器需要自动调整功率输出,以便随时捕捉最大的可用功率。这种从太阳能光电板上捕捉最大可用功率的算法,被称为MPPT。太阳能电池板阵列的电压特性和电流特性要求:在任何太阳辐照度和电池板环境下,都必须提供能从阵列中获得最大功率的最佳工作条件。逆变器需要主动搜索最大功率点。当逆变器处于瞬态且未在稳态条件下振荡时,理想的MPPT算法应能迅速将逆变器调整为能够获得最大功率的状态。缓动、振荡MPPT算法都会浪费捕捉可用功率的机会。振荡算法还可能导致阵列电压崩溃。从太阳能光伏系统中获取稳定的最大功率,取决于嵌入式处理器读取、处理并响应逆变器物理变量的精度和速度。
电网同步
相位跟踪系统是控制系统的一个重要组成部分。它既影响逆变器输出的功率因数控制,也影响逆变器输出电流的谐波含量。理想情况下,相位跟踪算法应该既能快速响应电网定相的变化,也能屏蔽电网电压中的噪音和高次谐波。目前已提出了很多算法,最早的相位跟踪算法以零交越检波为基础。当电网电压零交越时,逆变器输出电流将与电网同步。该算法可能会受到电网电压中噪音和高次谐波的影响。此外,零交越检波存在速度问题,它在每个电网周期中只能对电网定相做出两次响应。借助开、闭环技术,许多滤波技术已可以实现电网定相估算。
锁相环(PLL)技术已成为一种用来估算电网相位的行业标准。通过补偿器设计,可以调整收敛速度、稳态噪声和抗干扰性能。PLL在跟踪电网相位方面表现良好,即使电网电压中出现高次谐波时也不例外。但当电网电压不平衡时,PLL的性能可能变差。使用前置滤波器技术或后置滤波技术,可以避免公用电网系统产生失衡。
时变三相电网电压便于实现控制目的。为操控自然模型,我们通过转换功能把一个参考坐标系的量转换为另一个参考坐标系的量。通过一次转换可将三相耦合电压(abc坐标系)转换为两相去耦电压(αβ坐标系)。第二次转换将一个参考坐标系中的量转换为第二个参考坐标系的量(dq坐标系,与第一个坐标系相差一个相角)。PLL的目的是估算公用电网系统的相角。综合以上两个将三相电网abc量转换成dq量的转换过程,可知:
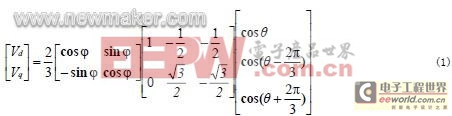 转换完成后,两相去耦电网电压变为:
转换完成后,两相去耦电网电压变为:

当φ接近θ时,vd (t)变为0。为达到控制目的,将其线性化为: vd (t)=(θ φ)
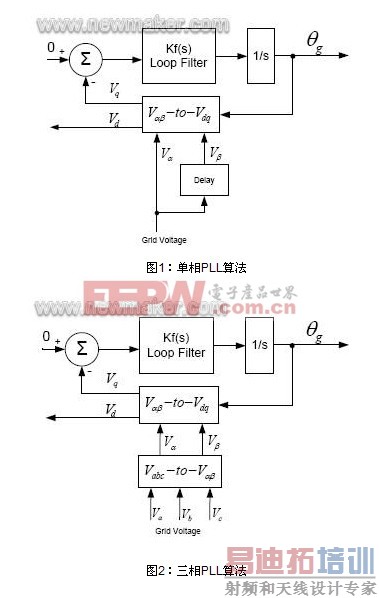
借助合理的环路滤波器设计, (PLL频率值)和 (相位值)可分别用于跟踪ω(电网频率值)和θ(相角值)。在二阶环路中用到的比例积分(PI)型滤波器的计算公式如下:

其中,α=1 T/τ,T为采样周期。图1为单项逆变器PLL的功能框图。图2显示三相PLL算法。
 防孤岛效应
防孤岛效应
为安全起见,当公用电网由于某种原因中断后,并网逆变器须与公用电网断开。这样,当电网系统不受电力公司直接控制时,就可以防止注入电网系统的电能对供电人员和设备造成伤害。当电网未运转时,如果逆变器将电能注入电网,将会产生孤岛效应。
所有并网逆变器必须具有过频/欠频(OFP/UFP)和过压/欠压(OVP/UVP)保护方法,以便当电网电压或频率超出可接受的范围时,防止逆变器为电网供电。图3显示了逆变器与公用电网的典型连接。逆变器的输出功率为P +jQ,本地负载为Pld +jQld,其余功率由电网ΔP +jΔQ提供。电网断开后,系统是否运转由ΔP和ΔQ的值决定。如果ΔP≠0,电网电压的振幅将产生变化,且OVP/UVP能够检测到这种变化并防止孤岛效应的产生。如果ΔQ≠0,电网的相位会产生突然转移,OFP/UFP将对频率的变化和孤岛条件进行检测。当逆变器实际功率和无功功率与负载不匹配时,或者当负载网络的谐振频率值与逆变器OVP/UVP的谐振频率值之间存在很大差距时,可利用OFP和UFP来检测孤岛条件。然而,仅通过逆变器来满足负载要求时,检测孤岛条件的难度就大大增加了。逆变器的认证测试要求(例如IEEE1547)旨在考察当ΔP和ΔQ的值都接近于0时,逆变器的响应时间。
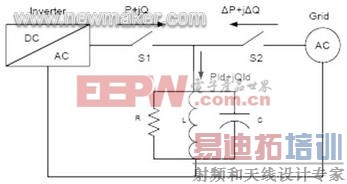
图3:逆变器与公用电网的接口
不可检测区(NDZ)的概念用于确定在给定ΔQ、ΔP值的条件下防孤岛算法的有效性。孤岛检测的反应时间取决于NDZ。ΔQ的NDZ值的计算公式如下:

有很多种主动和被动的方法可以检测孤岛条件。被动方法要么难以实现,要么有较大的不可检测区。而主动方法则需要向电网加入干扰信号。为避免电网在正常工作状态下变得不稳定,必须对干扰信号的加入进行合理控制或使其与其它逆变器协调。如能同时实现桑迪亚频率移动算法和桑迪亚电压移动算法,将能够非常有效地检测孤岛效应。桑迪亚频率移动算法基本是在频移算法的基础上进行了改动,见下列公式:
cf = cf 0 + K(fa fline),
其中,K是一个加速器,当电网断开后,它可以使逆变器输出频率变得不稳定。
桑迪亚电压移动算法与频移算法相似。逆变器输出电流根据电网电压的变化增加一个额外的项,见下列公式:
iout = iref + KΔV。
这两种方法均导致逆变器输出波形的电能质量变差。波形的质量与预期的检测时间可通过K值进行权衡取舍。桑迪亚算法通过逆变器向电压和频率调节加入少量正反馈,因此逆变器会不断尝试让电网变得不稳定。当电网稳定性强时,这个算法可以产生非常好的效果;但试想一下,如果可再生资源进一步加大渗透力度,会发生怎样的情形呢?
电流调节
电流调节算法用来控制需要传输到电网中的输出电能量。要想对最大电能进行有效处理,电流调节算法的精度非常关键。为符合适用标准对总谐波失真的限制,电流调整算法的质量也十分重要。
业界提出了许多控制算法来控制逆变器并网运行时的输出电流。带有各种闭环补偿器的迟滞型控制器是在可变或恒定的开关频率下运行的。此处介绍一个易于实现的有效电流调节算法,该算法可与各种电网同步方法配合使用,也适用于多级逆变器。
为控制正弦逆变器输出电流,可将动态坐标系转换成参考坐标系,在该坐标系中,预期的波形是一个直流量,而不是特定频率的正弦曲线。也就是说,这是一个dq参考坐标系。这样,可以利用积分控制操作消除稳态误差。完成dq坐标系转换后,逆变器的电气动态特性如下:
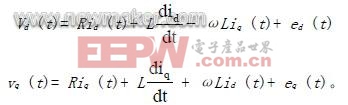
一个坐标轴上的动态值取决于另一个坐标轴上的电流状态(这就像电机里的交叉耦合,直轴磁通生成正交轴反电动势,或者相反)。这里介绍了一种由两种状态(电流和频率)的乘积决定的耦合多输入多输出(MIMO)系统。通过测量电流和补偿电流可以估算出耦合项。电网电压可表示为对系统的干扰;系统也可以根据电压测量结果,对电网电压进行补偿。前馈补偿和去耦完成后,需要进行控制的一阶发电厂的线性模型如下:
所选的控制器结构是一个带有转换功能的PI控制器。
 补偿器零点的频率为KI/KP,假设它低于电厂R/L极点的频率。因此,波特图的渐近线如图4所示。
补偿器零点的频率为KI/KP,假设它低于电厂R/L极点的频率。因此,波特图的渐近线如图4所示。
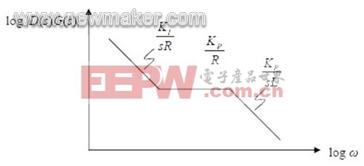
图4:开环波特图渐近线
图5为电流调节算法的框图。当动态坐标系转换为旋转参考坐标系时,三相和单相系统都可以使用该算法。PI控制器的数字实现方式如下:
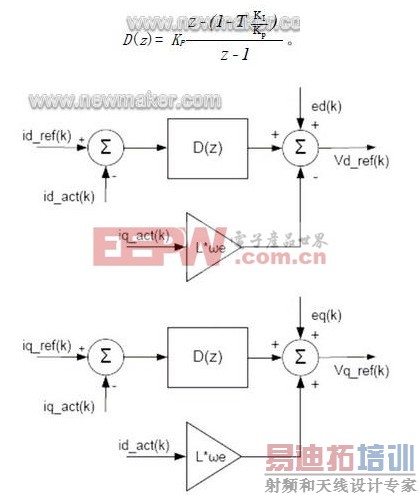
图5:电流调节算法PWM实现
为单个相位计算完基准电压后,PWM生成算法将为每个逆变器开关生成占空比。正弦PWM技术很容易实现且非常有效。正弦PWM的生成已被模型化,因此,它能够为2、3、4、5级逆变器分别生成开关位置。电流控制器产生的基准电压值(Vref)介于-1至1之间。Vref根据拓扑结构内的级数呈比例变化;m代表级数。多级比较器产生的开关位置输出值的范围在0至m-1之间。
利用正弦PWM技术,可以单独控制逆变器的每一个相臂。以三相逆变器为例,利用正弦PWM技术,可以将逆变器的三个相臂一起控制,从而能更好地利用可用直流总线电压。空间矢量技术为三相控制提供了一个集中控制器。
多级逆变器可以从三种或更多的分立电压电平生成输出电压。对于一个m级逆变器,每个相位的开关函数值为0至m-1。相臂电压为:

每个开关状态可产生唯一定义的三相线电压。当三个相位的开关位置分别为i、j、k时,逆变器输出电压可由开关矢量表示为:
注意:逆变器的不同开关位置可产生不同的开关矢量。对于平衡的输出电压来说,线到线电压的总和必须为0。也就是说,开关矢量可以以二维的方式来表示。利用具有适当持续时间(占空比)的、最接近的三个矢量,可以实现基准电压。也就是说,由最接近的三个矢量的时间加权组合可以生成基准电压。调制器的主要目的是选择逆变器的开关位置和每个开关位置需要持续多长时间,以便生成基准电压。非正交矢量可以方便地用作表示开关矢量的新方式。单次基础转换如下:
 因此,。归一化为Vdc后,所有开关位置相量均为整数。图6显示出gh坐标中的三级逆变器的开关位置矢量。在一个开关周期中,如果连续利用三个最接近的矢量,电压Vref可以逆变器输出电压的形式实现。
因此,。归一化为Vdc后,所有开关位置相量均为整数。图6显示出gh坐标中的三级逆变器的开关位置矢量。在一个开关周期中,如果连续利用三个最接近的矢量,电压Vref可以逆变器输出电压的形式实现。
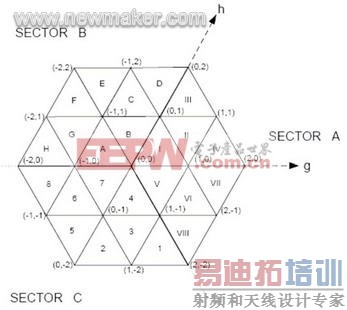
图6:坐标中的三级逆变器的开关位置矢量
独立控制
在缺少公用电网的情况下,可再生能源系统可以为本地负载提供能源(假设逆变器可以获得足够的电能)。直流和交流端的控制结构可根据本地负载的需要进行调整。如系统内没有备用电池,系统将无法以最大的功率运行,因为这可能导致持续产生不平衡的电能。独立工作时,电能转化主要取决于所需的本地负载和逆变器内部损耗。如果有足够的能源,本地负载可以完全由逆变器提供电能。如果负载的需求量高于可供应的电能量,则需要断开低优先级的负载,以保证为高优先级的负载提供电能。
交流端的电压和频率由逆变器控制。同样的电压调节算法也可用于不间断电源。根据电压控制的稳态和瞬态要求,可以采用不同技术。UPS系统中用到的一种颇具吸引力的方法就是RMS电压控制。PI补偿器可控制RMS电压。补偿器的输出可以调整60Hz正弦PWM的调制指数。该类型的控制可在稳态下提供稳定的输出,但瞬态性能可能无法满足强负载瞬态的需要,例如起动压缩机驱动的负载。图7为独立逆变器的RMS电压控制框图。

图7:独立逆变器中的RMS电压控制在瞬态期间,瞬时电压控制可提供更高强度的控制。在进行噪声模拟测量的情况下,设计补偿器尤为困难。图8为独立逆变器的瞬时电压控制框图。
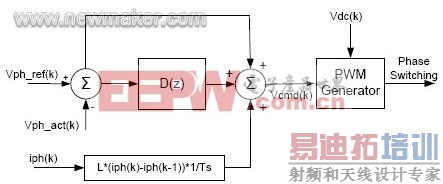
图8:独立逆变器中的瞬时电压控制
多环电压控制算法可在稳态和瞬态操作下提供更好的结果。RMS电压控制器需要60 Hz基准电流。内部电流调节器可以通过测量瞬时电流来调节电流。
信号处理要求
前面各节中讨论过的几乎所有算法或者是以数字格式开发,或者是以数字方式实现,以获得最佳效果。首先,模数转换器可将测量到的模拟信号(例如:电压、电流和温度)转换为数字信号;然后,由处理器利用控制算法对数字数据进行处理;最后,向物理设备发出命令来进行控制操作(通常为数字形式)。需要进行数字化处理的模拟信号需要高精度模数转换器;精度最少应达到10个可用位。另外,模数转换器的转换速度必须足够快,否则,每个中断周期的长度将是系统无法接受的。
逆变器的所有控制行为都需要经过大量处理。例如,带有电网同步功能的电流调节器在中断服务例程中需要930个操作。除此之外,MPPT算法可能需要410个操作,防孤岛控制可能需要545个操作等等。很显然,对于20kHz PWM操作,逆变器需要使用周期率高于200MHz的处理器。
此外,DSP还必须集成关键外设,例如:串行/并行接口、PWM单元和一个真12位分辨率、紧密集成到处理器的12位模数转换器。处理器还应集成用于执行代码的闪存,以减少对外部存储器的需求,从而降低整个系统的成本。处理的精度和速度会影响到从可再生能源中获取的能量、部署到公用电网中的电能质量、发生孤岛效应时的人身安全以及与外部设备通信的能力。除了进行控制操作外,逆变器还需要与外界进行通信,以获得状态和数据报告、确保并行单元有效协同工作,并在智能电网中实现信息共享。图9显示了单相太阳能光伏发电系统的整体框图。高性能处理器可以在单个芯片中提供所有上述功能,例如ADI公司的新款400 MHz Blackfin BF50x系列处理器,可用于数字信号处理和控制处理,具有片内闪存、集成式12位数模转换器和稳定的外设组合。具备这些功能的处理器经过优化,可支持各种复杂的控制算法,以确保获取最大电能并实现高效、可靠、安全电能处理。
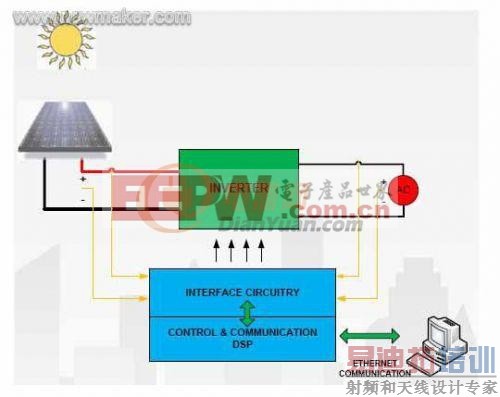
图9:单相太阳能光伏发电系统框图
总结
本文简要介绍了与公用电网相连的逆变器在建模与控制方面的挑战。第二节介绍了用于太阳能光伏发电的MPPT技术。第三节讨论了电网同步方法,详细说明了已广为接受的锁相环(PLL)算法,并探讨了孤岛现象以及逆变器在此方面的弱点。第四节介绍了常用的防孤岛技术,并重点介绍了桑迪亚电压移动和频移算法。第五节讨论了电流调节算法和线性前馈数字PI电流调节器。第六节介绍了用于多级逆变器的PWM生成算法,这种通用算法可由任意级数的逆变器实现,另外,还对正弦波PWM和空间矢量技术进行了阐述。第七节介绍了不与公用电网相连的独立逆变器。第八节说明了实现逆变器算法的嵌入式控制所面临的挑战。第九节对全文进行了总结并给出了结论。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
