- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
PSoC4试用报告 控制步进电机驱动器的模拟实验
录入:edatop.com 点击:
一、概述
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角 。它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器 。
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
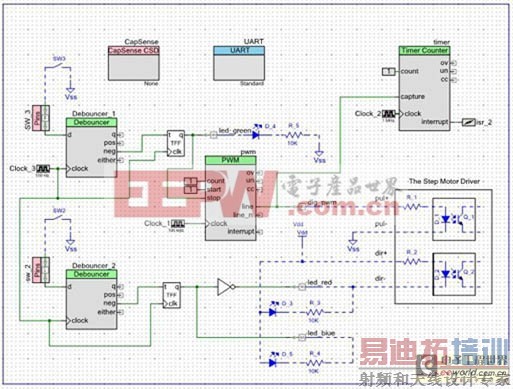
基于以上叙述,可以利用CY8CKIT-042板上CY8CKIT-42的组件CapSense 和PWM组合作用,输出变化的脉冲,作用于驱动器,控制步进电机转动;可以利用防抖Debouncer 和触发器TFF形成电路,产生数字开关量,作用于驱动器,确定步进电机转动方向。

二、原理叙述
1、确定步进电机转动方向
按动按钮SW2(在CY8CKIT-042板上),经过防抖Debouncer_2 、触发器TFF和非门,产生“1”、“0”信号,作用于驱动器“dir+ 、dir-”,来改变步进电机转动方向。这用CY8CKIT-042板上RGB 的LED蓝灯和红灯分别亮、灭,进行模拟区分是正转、还是反转。
2、步进电机启、停和调速
按动按钮SW3(外接),经过防抖Debouncer_1 、触发器TFF,作用于指示灯D_4(外接),绿灯亮、灭表示步进电机启动、停止。
指示灯D_4(外接)灯灭,表示下降沿触发启动脉冲调制器PWM,产生脉冲信号,作用于驱动器“pul+ 、pul-”,步进电机转动。利用PSoC 4开发套件的容性触摸感应CapSense组件和脉冲调制器PWM组件的作用,通过滑动触摸条,产生变化的脉冲信号,达到调速的目的。这里,利用红色指示灯D_1(外接)的亮度变化来模拟脉冲信号的变化。
3、步进电机转速的显示
根据步进电机的步距角,确定转动一周所需要的脉冲数和计时计数器timer计时,计算转速RPM,其值经过软件处理,通过 UART 和the PSoC 5LP USB-UART bridge传送 ,显示在电脑的putty上。三、所需的组件
本模拟采用本套件以下组件,组件的配置见附件:Step_Motor_Project图片.zip
· CapSense
· UART
· PWM
· Timer Counter
· CyTFF
· Debouncer
· CyClock
· CyPins
· 非门
四、软件
软件main.c包括本例软件设 [p] 计流程。
五、硬件连接
1、UART 的P0.5、P0.4联接到the PSoC 5LP UART bridge 的P12.6 、P12.7。
2、外接的器件,须联接到套件的GND、P0.0、P0.7、P1.0、P2.0等管脚。
六、调试
1、将电源跳帽插入+5V端,系统由+5V供电。
2、在PSoC Creator 2.2中,经Build和Program后,按动按钮SW2(在CY8CKIT-042板上)、SW3(外接),滑动触摸条,观察CY8CKIT-042板上RGB 的LED蓝灯和绿灯、指示灯D_4(外接)和反映脉冲变化指示灯D_1(模拟外接)的变化。开通电脑的putty,观看转速RPM,在putty显示如下变化:

七、心得体会
在PSoC Creator 2.2平台里,即能作图,又能编程,显得图文并茂,新颖别致;套件里的组件,可以独力使用,显得与其它单片机不同的地方,体现了所要介绍的卓越的性能。
在本模拟中,使用了本套件不少的组件,一些在内部进行有机嵌入组合,且不需要软件编程,简化了设计过程、降低了设计了成本,优化了电路。
在本实验中,仅仅模拟了驱动器驱动步进电机控制转动正反转方向、启动电机和反映转速快慢的脉冲的变化,是一个简单模拟实验。至于使用还需要根据具体的步进电机和驱动器数据参数,进行详细的编程设计;在电机工作不超载的情况下,电机的转速,根据步距角确定电机转动一周所需的脉冲数及计时出发出这些脉冲所需的时间,通过软件编程计算和通讯,将转速RPM显示在终端显示器上,这想在以后实用过程中再做。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:直接甲醇燃料电池空气阴极的研究
下一篇:MAX762太阳能密封式铅酸电池充电器研究
射频和天线工程师培训课程详情>>
