- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于神经网络的无位置传感器无刷直流电机驱动设计
录入:edatop.com 点击:
1实机测试
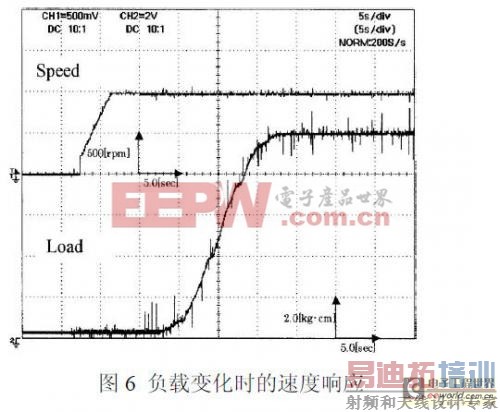
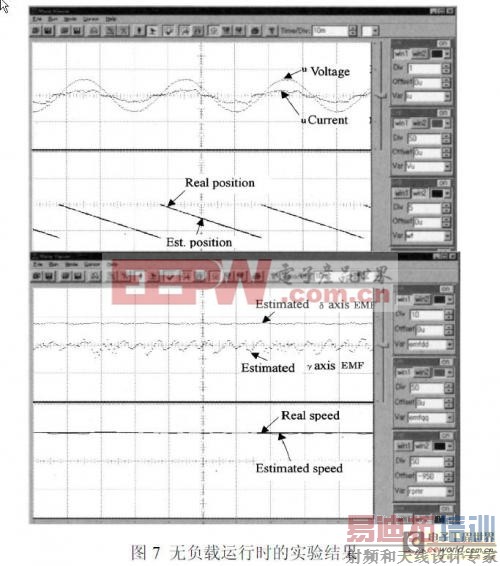
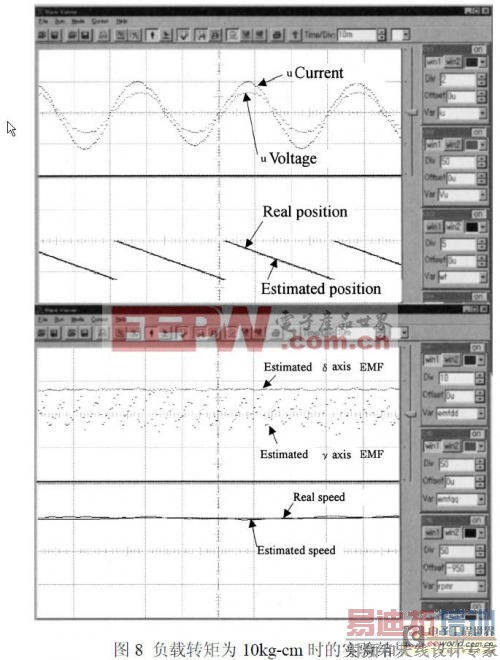
实验系统的结构如图5所示。扭矩仪的 测量 范围是10kg-cm。在这个控制系统里的电动势估计神经网络模型有7个输入层,14个中间层,和两个输出层。神经网络被离线训练后来处参考速度和的负载的波动。特别地,在扭矩为0.001,0.5,1.0 N-m,当参考速度从400→800→1200rpm,通过一个位置传感器 驱动 电机来获得训练数据。电动势估计神经网络模型经过这样的训练后被应用到实机测试中,在该实机中,参考速度固定但负载变化。图6表明了在参考速度为1000rpm,负载扭矩从0增加到10kg-cm所得到的实验结果。从表上可以明显看出,即使是在负载变化时,电机速度仍与给定参考速度一致。在无负载运行和转矩为10kg-cm下, 电压、电流、检测的位置和估计的位置分别如图7,8所示。
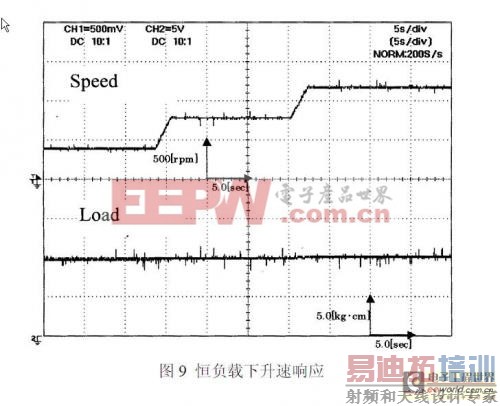
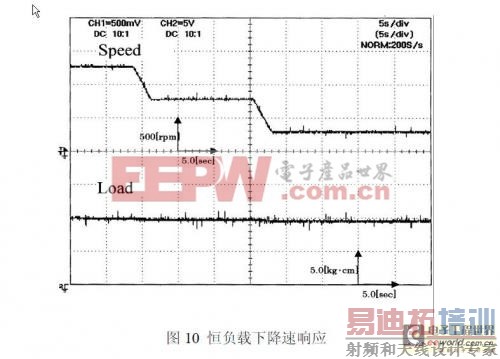
 当在负载转矩恒定,参考速度从400→800→1200rpm变化,实验测得的结果如图9所示。该图表明了当运行符合训练数据时的良好跟随特性。另一方面,当一项速度从1300→800→300rpm变化时的测试结果在图10中说明。
当在负载转矩恒定,参考速度从400→800→1200rpm变化,实验测得的结果如图9所示。该图表明了当运行符合训练数据时的良好跟随特性。另一方面,当一项速度从1300→800→300rpm变化时的测试结果在图10中说明。
 2 参数波动
2 参数波动
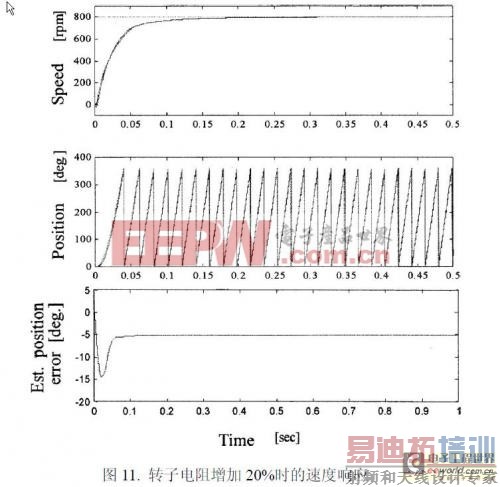
在实际电机中,我们假定电枢绕组电阻和其他 电机 参数将发生波动。特别地,当重载运行的大电流流过时,电机内部的温度将上升,这将导致电枢绕组电阻高于他的额 定值。因此,考虑可能的参数波动,我们做了一项仿真,在这个仿真里面,电枢绕组电阻上升20%的额定值,负载转矩固定为0.5N-m并且参考速度为 800rpm。仿真结果如图11所示。该图表明,实际位置与估计位置相一致,但实际上,位置估计误差大约为5°的电角度。另一方面,电阻波动的影响不是特 别强烈,从而我们可以推断:电动势估计神经网络模型能够处理电阻波动大于20%。因此,尽管参数波动确实影响神经网络的估计,但由于神经网络的概括能力估计误差仍然非常小。
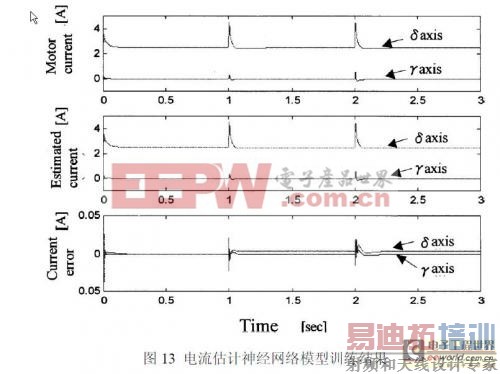
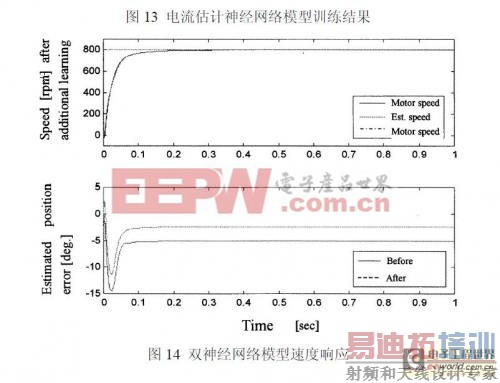
然 而,无论转子位置误差足够小,为了使电动势估计神经网络模型更具鲁棒性,额外的训练是需要的,从而提高估计的正确性。出于这个目的,我们准备了一个新的电流估计神经网络模型,如图12所示,而不是式(9)。用通过这模型得到的电流估计输出值和实际电流,我们同时修正了电流估计神经网络模型和电动势估计神经 网络模型。新的电流估计神经网络模型也事先离线训练。训练数据在转矩为0.001,0.5和1.0N-m,同时参考速度从400→800→1200rpm变化时获得。图13表明由电流估计模型在转矩为 0.5N-m、参考速度从400→800→1200rpm变化时离线训练的结果。从这些结果我们可以得出这样的结论:由于电流估计神经网络模型的离线训 练,估计的电流值非常准确。图14表明了使用实际的和估计的电流的误差对电动势估计神经网络模型采用额外训练后的仿真结果。从图中可以明显看到,速度估计仍然是准确的,并且电流估计误差减小到大概2.5°。因此,额外训练证明是有帮助的,我们推断在额外的神经网络训练起作用后,适当的估计是可能的,甚至是在参数波动表现出来时。
3结论
在这项研究中,我们证明了在负载条件下甚至是在参考速度或者负载变化的条件下,在直流电机控制系统中使用神经网络时,无传感器速度控制的可行性。然而,为了发挥神经网络的最大潜力,还有必要作进一步的研究。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:变压器设计的经验总结
下一篇:高电压控制和管理器适用于高功率电池供电型充电器
射频和天线工程师培训课程详情>>
