- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
光伏离网逆变器的设计
录入:edatop.com 点击:
摘要:本文在充分分析近年来光伏发电领域重要研究成果的基础上,设计了一套单相光伏发电离网系统,对系统的拓扑结构、控制电路给出了详细的设计要点。以dsPIC30F4011为控制核心,实现了电路保护、数据采集、参数设置等功能,为各种光伏离网控制算法提供了灵活可靠的硬件平台。在软件方面介绍了SPWM的控制算法,在分析现有最大功率跟踪(MPPT)方法的基础上,对现有方法进行了改进,把爬山算法引入到最大功率跟踪中。
引言
微网太阳能发电离网具有广阔的发展前景。本课题正是在这一思想的指导下进行对光伏发电离网系统的研究。主要内容如下:
(1)首先简单介绍太阳能光伏发电的原理和其系统的组成部分。并介绍了光伏离网的基本知识和相关的要求。
(2)设计并制作了基于PIC芯片dsPIC30F4011的500W单相光伏离网发电系统的硬件电路,包括系统的主电路、信号的采样与处理电路、充电电路、显示电路、PWM信号的隔离与驱动电路以及电源电路。对这些电路的工作过程进行了详细的分析,对电路中的参数进行了计算,完成了硬件电路的制作与实验调试。
(3)研究太阳能光伏发电逆变离网的控制方法。选定采用基于SPWM的三角波比较电流型单相并网的控制策略。利用MATLAB软件对系统进行建模和仿真。
500W微网逆变器电路设计
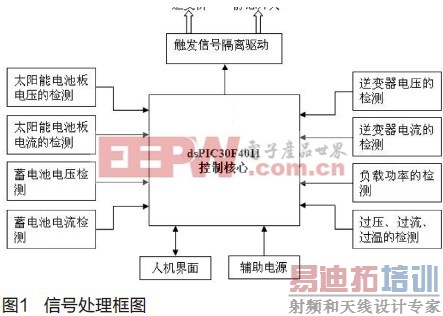
微网逆变器是微网逆变器系统中的关键部分。微网逆变器的控制电路采用Microchip公司的dsPIC30F4011作为主控制器,由软件生成SPWM。实现直流侧电压、电流的采集;交流侧电压、电流的采集与有功、无功的计算;电网的相位检测,实现与市电同步;过压、欠压,过流,功率器件的过温等保护;其信号处理框图如图1所示。其中DC/DC变换器采用全桥拓扑结构实现直流电压的升压功能,由于推挽结构存在偏磁问题,使得系统工作不稳定,故不采用推挽结构升压。PWM驱动信号由DSP产生,通过实时采集母线上的电压,计算出给定值与当前值的误差值,再PI闭环控制算法进行运算,从而使得直流母线上的电压稳定在设定值处。
主控制芯片的选择
控制芯片要实现的功能有:对检测信号进行A/D转换;产生PWM波形;完成MPPT。控制电路的核心器件采用美国微芯科技公司的dsPIC30F4011,这是微芯科技公司推出16位微处理器,其内部采用改进型哈佛结构,它不但运行速度高,处理功能强大,并且具有丰富的片内外围设备,便于接口和模块化设计,其性价比极高。dsPIC30F4011是Microchip公司专为电机高速控制设计的一款微处理器。
微网逆变器信号调理电路设计
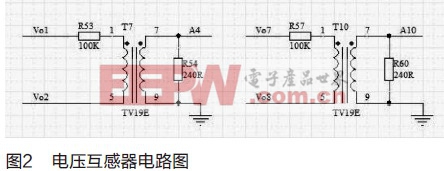
由于DSP不能输入负电压,故逆变器的输出线电压和线电流,电网端的线电压和线电流总共4路信号要通过信号调理才能送入DSP。此系统输出是交流电,输出线电压为100V,故选择TV19E电压互感器,其输出负载电阻可以接0~500欧,输出交流电压0~2.5V,此系统采用240欧的电阻,输出电压-1.2V~1.2V。满足DSP的输入要求。电路如图2所示。
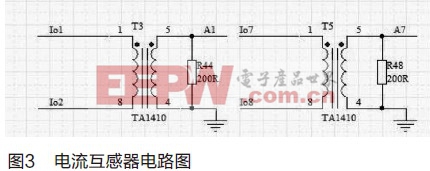
此系统输出电流小于1A,故选择最大可以测量1A的电压型电流互感器TA1410,负载电阻用是200欧,输出电压为-1~1V的交流电压。电路如图3所示。
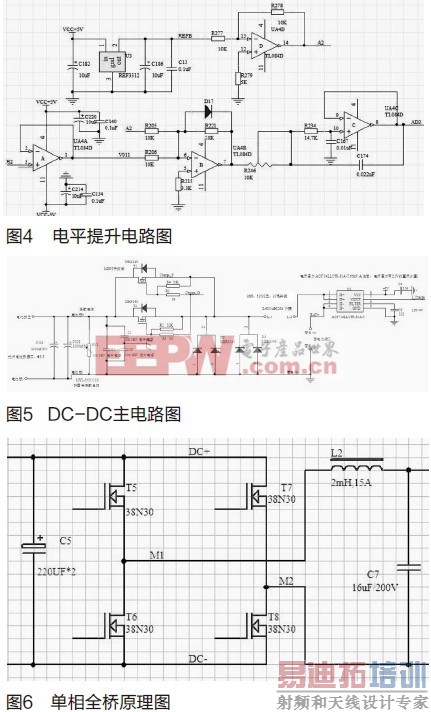
由于DSP输入端不能输入负电平,故要对电压互感器和电流互感器的信号进行+1.25V的提升,使输入信号在0~3.3V之间。电平提升电路如图4所示。此电路首先是通过REF3312得到高精度+1.25V基准,通过运放D反向,送入运放B的反向输入端,电流互感器或者电压互感器的信号通过运放A组成的电压跟随器后,同样送入运放B的反向输入端,这样经过运放B进行叠加后输入信号得到提升。
DC-DC主电路设计
DC-DC主电路如图5所示。
(1)主功率管的选择
目前,MOS管以其优良的开关特性、较低的饱和压降以及容易驱动等特点在中小功率开关电源以及逆变电源中占据了主导地位,因此本系统采用MOS管作为功率开关器件。MOS管的选择可以从器件的电压等级和电流等级两个方面加以考虑。系统的前级升压的最高电压约为45V,即桥式电路的最大输入电压。因此,各开关管所承受的最高电压为45V,考虑电压尖峰和电压裕量,可选择耐压为60V的器件等级;而电流则要根据通过它们的最大峰值电流来确定。根据上述分析其耐压取60V;而其额定电流应大于电感电流峰值的最大值。但由于太阳能电池板的特殊性,这个电流的最大值应不会超过太阳能电池板的短路电流Isc,即6.6A。为方便,BUCK电路中的开关管选用2SK4145(80A/60V),二极管选用MBR3045(30A/45V),考虑到稳定性,最终采用两个管子并起来接入电路中。
(2)储能电感及输出滤波电路的设计
BUCK电路工作在电流连续工作模式,根据BUCK电路输出电压表达式,可得PWM最大占空比Dmax发生在输入直流电压最低(10.5V)而输出直流电压最高(230V)的时候,最小占空比Dmin发生在输入直流电压最高(13.5V)而输出直流电压最低(160V)的时候,则根据电流临界连续条件求得电感L=1mH。
[p]SPWM逆变器工作原理
逆变器是用来实现DC-AC变换的电力电子设备。和所有其它类型的电力电子装置一样,逆变器利用一组电力电子开关来实现电能形式的转换。由图6可见,当开关T5、T8导通,开关T6、T7关断时,输出端可以获得正极性的瞬时电压;而当开关T5、T8导通,开关T6、T7关断时,输出端可以获得负极性的瞬时电压。以一定的频率切换两组开关导通的状态,即可实现由直流电压到交流电压的变换。无论是任何具体形式的逆变器,或是其它类型的电力电子变换器,其实现电能变换的基本手段都是通过这种对电子开关的快速通断控制来改变电压(或电流)的极性(瞬时的或平均的)和幅值(平均的)。
简单地按照图6的方法控制,只能获得方波型交流电压输出,其谐波含量很大,幅值也无法调节。如果要获得理想的输出电压,只需对开关过程进行控制,PWM技术可以解决这个问题。
蓄电池充放电及MPPT电路设计
智能充放电器采用升降压拓扑结构,并用dsPIC单片机进行智能控制,从而完成太阳能电池板最大功率跟踪。所谓最大功率点跟踪,即是指控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最高的效率对蓄电池充电,本系统采用爬山算法实现。爬山法是通过将本次光伏方阵的输出功率和上次的相比较来确定增加或减少光伏方阵工作电压来实现MPPT。如图7,若ΔP>0,说明电池板工作于上坡段,即最大功率点Pm的左侧,需继续增大工作电压,从左边向最大功率点靠近;若ΔP<0,减小工作电压,从右边向最大功率点靠近;若ΔP=0,电池板工作于最大功率点附近,于是工作电压在光强变化之前时保持不变。
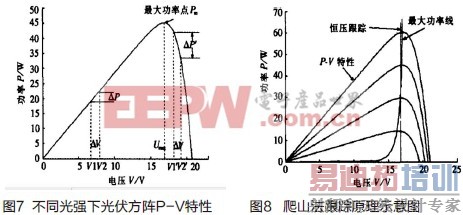
如图8,在最大功率点的左侧时,光强由上一时刻的S1减小为当前时刻的S2,按照爬山算法的原理,可知此时ω2-ω1=ΔP<0,认为电池板工作于最大功率点Pm的右侧,工作电压被减小,而实际上电池板处于上坡段,工作电压应该增大才能向最大功率点靠近。同理,在最大功率点的右侧时,也有类似的情况出现,这就是爬山法在光强变化时的误动作,爬山改进法就是为解决这个问题提出的。
爬山改进法增加下一时刻的电压V3对应的功率W3参与判断。如图8,当ΔP>0时,如果W23,说明是光强变化引起的功率变化,应保持原来的工作电压不变,否则,说明电池板工作于最大功率点的左侧,需增加工作电压;同样,当ΔP<0时,如果W2>W3,应保持原来的工作电压不变,否则需减小工作电压。爬山改进法避免了爬山法跟踪的误动作,有利于提高最大功率跟踪的效率。

软件设计和测试结果
根据前面分析讨论,研制一套基于Microchip公司的PIC芯片dsPIC30F4011的500W光伏离网发电装置,由于此单片机拥有强大的控制能力和数据处理能力,使整机硬件结构较为简单,除了主电路、取样检测电路和驱动电路外,所有的运算、数据处理均由DSP完成。因此合理有效的控制策略和简洁软件构架是该系统可靠运行的有力保证。根据前面的分析和光伏离网发电系统的基本要求,DSP应该完成最大功率点跟踪控制、独立供电运行控制及相应的其它保护。对于一个逆变电源来讲,当输入电压或输出负载发生变化时,逆变电源的输出基波电源会发生变化,为了稳定输出的电压,则要调整参考正弦波的幅度。为了在危机条件变化时能够自动稳压,必然要引入闭环控制。逆变器的控制方法有很多种,比如输出电压平均值反馈控制、瞬时值反馈控制、以及输出电压电流双闭环控制等,随着控制芯片的性能提升,一些现代控制理论也在逆变电源中获得应用。
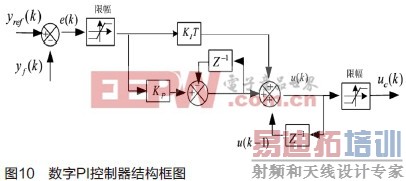
在本设计中采用输出电压平均值反馈控制方案,控制器采用常用的PI控制器,其输入为给定值和反馈值的差值,输出为脉冲宽度控制比例。整个系统的控制过程为:如果反馈值和给定值不一致,比较如反馈值比给定值小,控制器就会根据输入的误差适当的调高输出,即增大输出脉冲的宽度,从而使得输出基波的电压增大,达到稳压的效果。数字PI控制器的模型可由模拟PI控制器导出。

对频域传函进行离散化的方法有向后差分法,向前差分法以及双线性变换法等,通常向后差分法。
上式即为编写数字PI程序的递推关系式。图10为数字PI控制器的结构框图。
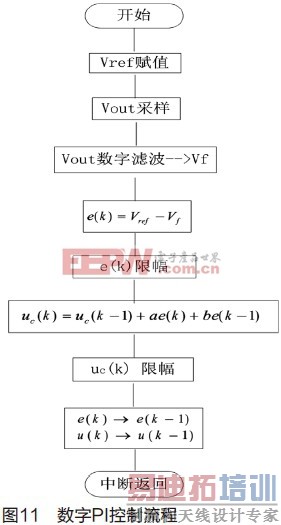
本设计中电压反馈环节PI控制器的子程序流程图如图11,流程图中变量名定义如下:
电压给定:Vref
电压反馈:Vf
输出电压:Vout
前一拍的误差量:e(k-1)
当前拍的误差量:e(k)
前一拍的控制器输出控制量: Uc(k-1)
当前拍的控制器输出控制量:Uc(k)
最大功率点(MPPT)及BUCK电路的降压控制。该模块主要实现对光伏输出电压的降压控制以及对电池最大输出功率的跟踪控制,本系统计算瞬时输出功率跟踪策略来实现电池的最大功率输出。
总结
本文对光伏电池的特性、光伏发电系统的基本构成作了一定的分析讨论,对实现光伏离网发电系统的几个关键技术问题如最大功率点跟踪控制技术、主电路拓扑结构问题、离网发电控制策略等方面作了详细的分析和探讨,在此基础上研制了一台基于Microchip公司的芯片dsPIC30F4011为核心的500W光伏离网发电系统实验装置并进行相应的实验,实验结果体现了系统设计的合理性和控制策略的有效性、可靠性。
参考文献:
[1] 杨素行.模拟电子技术基础简明教程[M].第三版.北京:高等教育出版社,2006
[2] 孟元东.太阳能用单相正弦波逆变器的研究[D].天津大学,2007-01
[3] 胡寿松主编.自动控制原理[M].第五版.北京:科学出版社,2010
[4] 马学军,等.数字PI控制器的原理仿真与数字实现[J].黄石:黄石理工学院学报,2004
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:基于零中频接收机的技术挑战及解决方案
下一篇:三极管9013管脚
以及参数
射频和天线工程师培训课程详情>>
