- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
[数字电源系列文章]数字电源监视和遥测
录入:edatop.com 点击:
在启动和停机之间,数字电源器件起什么作用呢?两种核心功能是监控和遥测。监控是一种快速动作安全功能,其可防止器件和/或负载受损。遥测是一种持续的质量管理功能。《Bodo's Power Systems》杂志近期的一则广告,罗列了上述两种功能对于数字电源有以下好处:
● 优化
● 预见性维护
● 故障检测
在这我们来看看一种典型的POL内部架构,并研究其对电源系统设计的影响。
POL内部架构
图1示出了具有3个主要功能块的简化POL。
● 监控器
● 监视器
● 数字处理单元
数字处理单元是“大脑”(未示出的是内核电源转换)。数字处理单元负责处理PMBus和CONTROL输入,并把POWER_GOOD和FAULT/置为有效。
大多数器件都具有多个这样的POL,不过为简单起见,我们可以插入输入和输出。
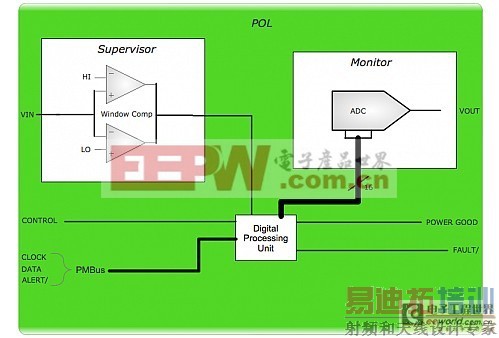
图1:POL结构
监控
监控电路是一个快速动作的单通道比较器或窗口比较器。一般地,输出会绕过数字处理单元中的状态机,并能直接阻止电源转换并把FAULT/置为有效。数字处理单元之后被更新,这样PMBus主机便能查询器件的故障寄存器。
监控器的用途是保护负载和器件,因此它会通过适当牺牲准确度来换取速度的提升。HI/LO数值通常存储于非易失性只读存储器(NVROM)之中,或者由PMBus通过诸如VOUT_UV_FAULT_LIMIT等命令来编程。另外,故障行为特性也被存储在NVROM中,并且包括像“重试”、“重试之间的延迟”等。
监视
监视是一种通过ADC实现的高准确度测量。数字处理单元通常作为一个状态机或软件环路(其负责轮询ADC输出数据并使之可为PMBus所用)来实现。此外,监视数据也可在一个非常准确的数字处理单元伺服环路中使用,以改善输出准确度。
故障
故障会因监控器或监视器而起。对于监控器,DAC给比较器提供一个基准,而输出则直接馈电至FAULT/引脚。而对于监视器,数字处理单元采用一个数字比较器或者至数字处理单元FAULT/引脚的软件条件指令。
权衡折衷
POL设计师所做的折衷相当直观明了。安全性规定了哪些输入和输出具有监控器。监视方面的权衡则涉及准确度(因为ADC占用电路板面积资源且消耗功率)、以及通道的数目和多路复用器等。
作为系统设计师,他必须考虑其系统使用数据的目的、以及它必须具有多高的准确度。例如,典型用途如下:
● 系统开发与运行状况检验和调试
● 效率监视
● 能耗监测
● 故障预测
● 优化(局部和全局)
● 准确度提升(伺服)
实例
每种电源架构都有其与众不同之处,并不存在一组通用的折衷,因此我准备举几个采用监控器和监视器的实例以启发您的想象力。此外,当了解到相关的可能性时,您或许会发现一种竞争优势。
监控器故障发生实例
该实例取自LTC2974,这款监控/监视器件可管理4个POL。其所负责的一个POL的输出电压具有一个基于窗口比较器的监控器。

图2:监控器产生的故障
扫迹4是该器件的FAULT/引脚,而扫迹3则是该器件的ALERT/引脚。我把输出短路至地。在该器件上,接地与FAULT/电平走低之间的延迟大约为12μs。在非常短的时间之后,我们还使一个ALERT/拉至低电平。这些都是非常快速的,因为监控器绕过了监视较慢ADC所需的全部状态机,并直接产生故障。另外,它还停止了电源转换。
来看一下PMBus,PMBus主机完成了一项报警响应地址(ARA)事务。地址0x0C被置于该总线上,而出故障的器件则把地址0x64放在总线上。主机将此右移一位以获得地址0x32。接着,主机通过把地址0x32放置在总线上(后随命令字节0x79)来读取故障寄存器的存储信息。然后,一个具有地址0x32的重复起动信号被置于总线上,并送回两个数据字节以提供一个0x8041的状态字。

图3:故障字位
查看该器件的数据表,其指出将发生欠压故障。
另外,我们也可以利用一种外部工具对此进行观察,该工具可显示器件的寄存器和状态。

图4:故障状态
还记得我的另一篇文章中提出的使用模型吗
监控器引起了一个支持两种模型的故障。其可由PMBus或一种外部工具来处理。
(注:我们将在今后的文章中看到这种设计的实现方案,但基本上ALERT/引脚连接至一个微控制器中断。)
温度监视实例
许多器件都能够利用一个二极管来监视内部芯片温度和外部温度。在本例中(LTC3880),我有一个电路板管理器,其负责通过PMBus来监视电源轨,并具有一个LCD触摸屏显示器。

图5:温度监视
遥测曲线图示出了内部芯片温度。当我把手指放在器件上而且它冷却时,曲线图中出现了凹陷。曲线图上的最小值和最大值分别为30℃和40℃。由图可见,测量结果相当不错。
器件将采用这种温度监视电路来保护自身,但其亦可用于检测更加细小的问题。如果您添加一个I2C温度监视器件,并把传感器布设在一块介于传感器和所有PMBus器件之间的PCB周围,就能很好地了解电路板的工作状况。您可
以借此来平衡温度(通过控制负载),标定系统在不同负载条件下的特性,或者简单地向系统操作员发送一条警告消息,这样他们就能将有问题的电路板换下并送去维修。
对于效率也可采取相同的做法。通过测量输入和输出电压及电流,您可以在执行中计算电源效率,并运用该信息来实现系统优化(通过转移工作负载以使转换器更接近于其最佳效率)。另外,您也可以注意发现那些反常的模式,这或许能帮助您在问题发生之前及时地加以检测。电路板管理器通常都具有通信接口,可为您发出此类通知。
自主型与受管型系统
我想把这些性能参数放入使用模型的环境中:
在我的前一篇文章中我提出了两种使用模型:
1. 配置(Configure)和部署(Deploy)
2. 监视(Monitor)和运作(Act)
另一种对此进行描述的方法是“自主型与受管型”系统。在自主型系统中,电源转换器的上电和运作完全独立于PMBus,与模型1很相似。受管型系统则主动地采用PMBus,这与模型2十分相像。
这些模型具有不同的性能特点。PMBus自身的性能受限于400Hz(典型值)总线时钟。监控性能与PMBus无关,无论在数字处理单元中作为一个模拟比较器和直接逻辑抑或是较慢逻辑来实现。
在受管型系统中(例如:Monitor和Act),Act部分具有与自主型系统相同的性能,直到PMBus位于一个由主机管理的决策环路中为止。当主机必须读取遥测数据以及对器件实施某种功能或参数变更时,性能通常受限于PMBus。
另外,托管系统性能也有着很大的不同,因为主机必须管理多个电源轨(电源轨的数量取决于系统架构)。假设读取一个数值及对应地变更一个数值需要200μs的时间(400kHz总线)。然后假定我在主机的控制环路中有10个电源轨,这样所需的时间即为2ms。现在,增设几颗用于监视温度的I2C芯片。在与PMBus无关的主机中添加其他的功能,最终系统的响应时间比数字处理单元慢。此外,如果由于某些较慢的I2C器件的原因而以100kHz的频率运行总线,则响应速度将变得更慢。
正因为如此,我们采用了混合式使用模型,其中关键性的功能全部由数字处理单元(和快速监控器)来处理,并且不依赖于PMBus,而较高级的功能(例如:能耗和故障预测)则由一个PMBus主机来操控。
由于同样的原因,当不需要较高级的功能时,器件完全可以自行运作,而PMBus是一个用于配置工具的使能器。特别地,PMBus工具对于电路板开发与运行状况检验是非常有用的。这种工具以仪表板格式来显示系统所有电源轨的状态:遥测、故障和设定值。
回顾
大多数数字电源器件都具有监控器和监视器。我已经将监控器作为一种快速动作安全器件,以及把监视器作为一种用于遥测的采样器件进行了特性分析。这虽然是一种适合分类的简便方法,但对于术语的使用应谨慎从事,特别是关于监控器和故障。有的时候,“监控器”这个词语被用于一种采用来自监视器之数据的故障发生方法,因此 [p]
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:基于DSP的智能中频电源设计(
一)
下一篇:STM32上SVPWM输出的实现方案
射频和天线工程师培训课程详情>>
