- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于LCL滤波的光伏逆变器网侧电流单环控制
录入:edatop.com 点击:
摘要:在光伏并网逆变器系统中,LCL滤波器相比单L滤波器具有更优的滤波性能,但其引入了谐振点,降低了系统稳定性。在不增加额外无源阻尼和传感器的基础上,提出采用网侧电流单环控制策略,利用数字控制过程中的延迟环节实现了系统的稳定控制。给出延迟环节的设计方法,实现了系统良好的并网谐波特性和动态特性,最后通过实验验证了控制策略的有效性。
关键词:逆变器;光伏并网;滤波器;单环控制
1 引言
光伏发电技术近年来发展十分迅速,其中并网逆变器是光伏发电系统的重要组成部分,逆变器通过L或LCL滤波器与电网连接。LCL滤波器由于具有更佳的滤波性能,逐步代替单L滤波器在工业中得到了广泛应用。然而LCL滤波器由于存在谐振峰,给系统带来不稳定因素。目前有许多方法来解决此问题,可分为无源阻尼、有源阻尼和无阻尼方案三大类。
无源阻尼方案通过在LCL滤波器上加入无源电阻,实现对谐振峰的阻尼作用。然而无源阻尼带来了额外损耗;有源阻尼方案通过控制实现阻尼作用,避免了引入额外损耗。然而有源阻尼方案通常需使用多个系统状态变量来实现,需要额外的传感器,即使采用观测估算的方法来间接获得其他状态变量,也对系统参数敏感性较强。文献考虑数字控制本身存在延迟,用网侧电流单环控制实现了系统的稳定,是一种无阻尼方案。该方案无需额外的无源器件和传感器,控制简单,然而该文献没有分析延迟环节如何实现系统稳定,也没有给出延迟环节的设计方法。这里详细分析了延迟环节对系统稳定性的影响,确定保证系统稳定的延迟时间的范围。并分析延迟环节对系统稳态和动态特性的影响,给出一种设计方法,实现了系统良好的动稳态特性。
2 系统描述
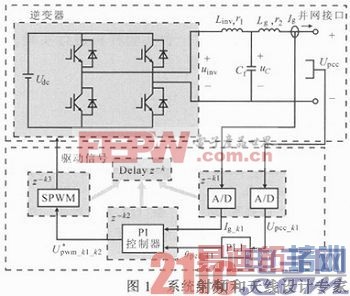
图1示出单相光伏并网逆变器系统结构图,系统参数:LCL滤波器中,Linv=0.6 mH,Cf=5μF,Lg=0.6 mH;电网电压有效值Ug=220 V,f0=50 Hz;直流电压Udc=400 V;控制频率fc=16 kHz;控制参数Kp=10.56,Ki=18700。LCL滤波器谐振频率4 110 Hz,前后级等效串联电阻约为0.1 Ω.采用双极性SPWM,控制和开关频率均为16 kHz。控制器采用传统PI控制,参数设计方法采用对称最佳法进行设计。数字控制中的延迟环节用z-k来表示k拍的延迟,主要是由A/D转换时间,控制延迟和PWM波生成过程的延时构成。其中控制延迟可进行灵活的设计来实现对延迟时间的调节。
3 延迟环节的影响分析和设计
3.1 稳定性分析
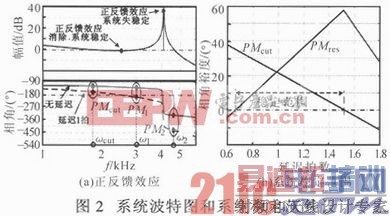
LCL滤波器由于存在谐振峰会带来系统不稳定的问题。图2a中实线表示不考虑延迟影响时系统的开环波特图。可见,在谐振峰处,系统增益远大于零,且相角正好穿越-180°。则在该频率点系统存在一个正反馈效应,谐振点处信号会被无限放大而导致系统失稳。虚线表示延迟时间为1拍的系统波特图,可见延迟环节不会对幅值增益带来任何影响,故不会对谐振峰起到阻尼作用,然而会对相角特性产生影响。由图2a可见,延迟1拍可改变原开环系统-180°的穿越点,使该点前移到幅值增益为负的区域,从而破坏原系统的正反馈效应,保证系统稳定运行。对于任意的LCL并网逆变系统而言,要保证系统稳定,需设计延迟环节,使系统-180°穿越点发生在图2a所示的ωcut和ω1之间,且在ω2点系统相角大于-540°。定义3个相角裕度PMcut,PM1和PM2:
 [p]
[p]
PMcut为截止频率相角裕度,取PM1和PM2中的较小者为谐振频率相角裕度PMres,其中θcut,θ1和θ2为系统在频率点ωcut,ω1和ω2的相角。要使系统稳定即要使公式定义的两个相角裕度都大于零,即公式给出了系统稳定区间的数学表达。图2b给出系统中两个相角裕度与延迟时间的关系,可见系统在0.65拍到1.5拍延迟时间内都稳定。
3.2 动稳态特性分析
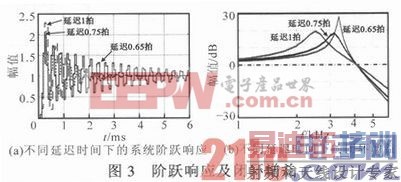
延迟时间还会影响系统的动态和稳态特性。图3示出不同延迟时间下系统的阶跃响应和闭环增益。由图3a可见,随着延迟拍数增加,系统超调量明显增加而调节时间缩短,且延迟0.75拍以后调节时间的变化已经很小。其中延迟0.65拍由于处于临界稳定的状态,调节时间远大于延迟0.75拍和延迟1拍的系统。由图3b可见,闭环幅值曲线上存在谐振峰,谐振峰大小反应了系统对该段频率谐波的抑制能力,谐振峰越大谐波抑制能力越弱。随着延迟时间增加,谐振峰频率逐渐减小,且谐振峰先减小后增大。延迟0.75拍时系统的谐波抑制能力要优于延迟0.65拍和延迟1拍。根据上述分析,延迟0.75拍时,系统可稳定运行,且获得更优的动态和稳态性能。
4 实验
设计一台基于LCL滤波器的单相光伏并网逆变器,系统参数如第2节所述。图4示出系统在不同滞后拍数控制下,负载从峰值5 A突增到15 A时输出电流波形和稳态输出15 A时电流波形。
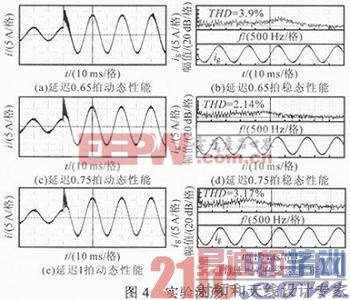
结果证明系统在延迟0.65拍控制下,负载突增时调节时间较长,超过10 ms,延迟0.75拍和延迟1拍控制下调节时间只有约5 ms。同时可见延迟1拍控制下负载突变时振荡较剧烈,超调量较大。从稳态效果来看延迟0.75拍控制具有最小的稳态THD=2.14%,延迟0.65拍和1拍控制下稳态谐波增加,THD分别为3.9%和3.17%。实验结果从稳定性、动态和稳态性能3个方面,验证了理论分析的正确性以及控制方案的有效性。
5 结论
基于网侧电流单环控制的LCL滤波并网逆变器,分析了延迟时间对系统稳定性的影响,给出了保证系统稳定的延迟时间的范围。进一步分析了延迟时间对系统动态和稳态特性的影响,提供了一种设计延迟时间的方法,使系统获得良好的动稳态性能。最后搭建了一台实验样机进行实验,结果证明该控制策略有效。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:三相光伏并网逆变器直流注入抑制策略
下一篇:用于BIPV系统的直流变换器的研究
射频和天线工程师培训课程详情>>
