- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于改进扰动观察法的光伏阵列MPPT研究
录入:edatop.com 点击:
摘要:针对常规扰动观察(P&0)法由于环境快速变化带来的失效性问题,提出一种基于改进P0法的最大功率点跟踪(MPPT)算法。采用一种压阻可变的方法模拟光伏阵列的输出特性。改进PO法通过控制Boost变换器的占空比改变变换器的输入电压,从而实现MPPT。以DSP芯片TMS320LF2407A为控制电路主处理器,以Boost变换器为主拓扑电路,搭建了模拟光伏阵列MPPT实验系统。实验结果表明,该改进算法能有效地跟踪光伏阵列最大功率点(MPP)。
关键词:光伏阵列;变换器;最大功率点;扰动观察法
1 引言
太阳能光伏发电是新能源和可再生能源的重要组成部分,能量转换效率较低是其发展受到制约的主要因素之一。要提高转换效率,需有效地解决MPPT问题。常用的MPPT方法有:PO法、恒定电压法、导纳增量法、最优梯度法等,文献比较了各方法的优缺点;文献深入研究了几种算法的合成算法;文献介绍了自适应模糊控制法等智能MPPT算法。
PO法是工程上实现MPPT最常用的方法之一,其跟踪方法简单,易于模块化控制,但在外界环境快速变化时该算法存在失效问题。此处提出一种改进的PO法,以提高系统应对外界环境快速变化的能力。采用一种压阻可变的方法模拟光伏阵列的输出特性,通过改进PO法控制Boost变换器的占空比来实现MPPT。
2 光伏阵列特性
光伏电池的基本结构是能够将光能转换为电能的PN结,其等效模型如图1所示。
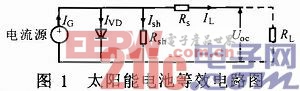
光伏电池输出特性方程为:![]()
式中:IL为负载电流;IG为光电流;Io为电池内部等效二极管反向饱和电流;Uoc为开路电压;UVD为等效二极管端电压;A为PN结曲线常数;K为波尔兹曼常数;q为电子电荷;T为电池表面温度;Rs为串联电阻;Rsh为旁路电阻。
在实际运行中,按照需要的功率和电压等级,可将若干个单体光伏电池串、并联组成光伏阵列。为了既便于说明问题,又不失一般性,此处采用光伏阵列的理想模型,其输出为:![]()
式中:Uall,Iall,Pall分别为光伏阵列的输出电压、电流和功率;Ucell,Icell,Pcell分别为单体光伏电池的电压、电流和功率;
Ns,Np分别为光伏阵列中串、并联的电池个数。
[p]
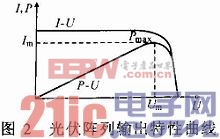
光伏阵列的输出特性曲线如图2所示。可见,光伏阵列在较高电压区域有低内阻特性,可视为电压源;在较低电压区域有高电阻特性,可视为电流源。在一定光照强度和工作温度下,光伏阵列存在唯一的MPP,其输出呈非线性特征。因此,在实际应用中,为了提高电池的使用效率,应实时调整光伏阵列的工作点,使其始终工作在MPP。
3 光伏阵列输出特性模拟
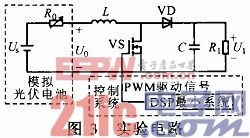
直接使用太阳能电池进行实验存在时间长、费用高等缺点。为了便于研究光伏阵列的输出特性,提出一种压阻可变的方法模拟光伏阵列的输出特性。实验电路如图3所示。图中,Us为直流源,R0为可变电阻,用于模拟太阳能阵列;U0为模拟光伏阵列的输出电压,后接DC/DC变换器,R1为纯电阻负载;DC/DC变换器选用Boost变换器。通过控制Us的值,改变光伏阵列MPP处U0的值;通过调节R0的值,改变最大输出功率。
对于理想Boost变换器,有:![]()
式中:U0和U1分别为Boost变换器输入、输出电压;I0为平均输入电流;D为占空比。
将变换器和R1看作一个等效电阻Re,则有:Re=U0/I0,结合式(3)可得:Re=(1-D)2R1。可见,Re的大小随D和R1变化。设光伏阵列模拟系统输出功率为P,则有:
P=U0Us/(Re+R0),U0=UsRe(Re+R0) (4)
联立式(4)消去Re,可得![]() 。当U0=Us/2时,有最大输出功率
。当U0=Us/2时,有最大输出功率![]() 。可见,P存在最大值,改变Us和R0的值可以模拟环境变化时光伏阵列的输出变化,说明使用该方法代替光伏阵列进行实验是可行的,且当U0=Us/2时,光伏阵列输出最大功率,此时Re=R0,即在R1变的情况下,使Re=R0可实现光伏阵列MPPT。
。可见,P存在最大值,改变Us和R0的值可以模拟环境变化时光伏阵列的输出变化,说明使用该方法代替光伏阵列进行实验是可行的,且当U0=Us/2时,光伏阵列输出最大功率,此时Re=R0,即在R1变的情况下,使Re=R0可实现光伏阵列MPPT。
4 改进PO法
PO法通过周期性地改变工作电压来改变P,并比较电压变动前后系统的P,从而决定下一步电压的改变方向。若P增加,则在下一个周期内电压继续向相同的方向改变;反之电压向相反的方向改变。如此反复地扰动、观察和比较,就可以跟踪到光伏阵列的MPP。PO算法的优点是结构简单,易于实现,但算法本身存在如达到稳态时,系统的输出在MPP附近振荡等不足,尤其是在天气环境快速变化时会产生错误方向的扰动。
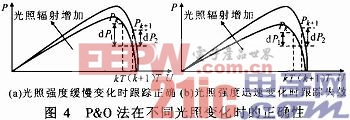
光伏阵列MPP电压受光照强度影响小,受温度影响较大。但在实际中,由于光伏阵列工作温度变化缓慢,相对而言,光照强度对其影响较大。光照强度缓慢和迅速变化时采用PO法对MPPT方向判断的情况分别如图4a,b所示。图中,T为采样周期;Pk,Pk+1分别为k和k+1时刻的光伏阵列输出功率:dP1为MPPT产生的扰动引起的功率变化量;dP2为光照强度变化引起的功率变化量。可见,若dP1>dP2,则在一个T内工作点向正确的方向改变;若dP1dP2,则工作点向远离MPP方向移动,导致跟踪失效。
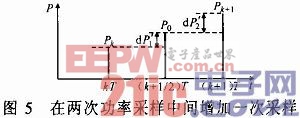
为解决环境快速变化时跟踪失效的问题,对PO法做如下改进:首先假设在一个T内,光照强度变化率为一个常数。在T/2时增加一次采样P0,在Pk~P0采样时间内不进行扰动,在P0~Pk+1采样时间内引入扰动,如图5所示。
[p]
在改进PO法中,dP1’只反映由于环境变化而引起的功率变化,dP2’反映跟踪产生的扰动和环境变化共同作用引起的功率变化,则在一个T内功率的变化量可表示为:
dP=dP2’-dP1’=Pk+1-P0-(P0-Pk)=Pk+Pk+1-2P0 (5)
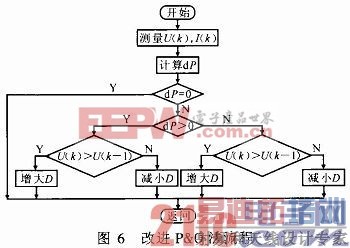
由式(5)可见,dP只反映由于MPPT产生的扰动所引起的功率变化情况。对于因扰动变化而引起的dP变化,通过控制D即可实现MPPT。改进PO法流程如图6所示。
5 实验分析
搭建了模拟光伏阵列实验电路。在Boost变换器输入端并联一个330μF的电容,以保证模拟太阳能电池能持续供电。系统采用DSP芯片TMS320LF2407A为主处理器,通过改变D的值来实现MPPT。Boost变换器升压电感为900μH,滤波电容为0.1μF,Us=100V,R0=100Ω,R1=120Ω。图7示出模拟光照强度突变时的实验波形。
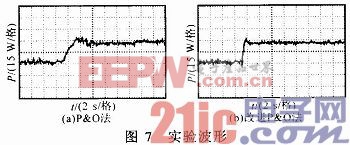
可见,当模拟光照强度突变时,改进PO法比常规PO法快约4 s跟踪到模拟光伏阵列的MPP,且稳定工作时能更迅速、准确地跟踪到MPP。经测量,在P稳定后,U0稳定在48.9~49.7 V之间,较好地满足了系统在MPP处的工作条件。
由实验可说明:一方面.调节Us和R0的值可模拟光照强度的迅速变化;另一方面,通过DSP控制的PWM脉冲不断改变D,从而改变U0,使其
迅速匹配模拟光伏阵列MPP对应的电压,并最终稳定在MPP附近。
6 结论
针对外界环境迅速变化时常规PO法失效的问题,此处提出一种改进PO算法跟踪光伏阵列的最大功率点,并采用压阻可变方法模拟光伏阵列的输出特性。以DSP芯片TMS320LF2407A为控制电路主处理单元,搭建了基于Boost变换器的光伏阵列最大功率点跟踪控制实验电路。实验结果表明,该算法简洁实用,能有效地实现最大功率点跟踪,具有一定的应用价值。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:自行车发电及安全预警系统设计
下一篇:运算放大器的原理
射频和天线工程师培训课程详情>>
