- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于MCU的汽车方向盘按键控制器系统设计
录入:edatop.com 点击:
在大多数现代汽车中,通过发动机控制单元(ECU)或发动机控制模块(ECM)监控整个发动机的各种传感器,从而控制燃料注入量、点火时序、可变凸轮时序及其他外设。如果误差条件导致负载电流超过预设限值,ECU 必须进行检测并关断相关电路以保护电子器件。图1 中的电路可检测过流条件并在100 ns 内向ECU 发送报警信号。
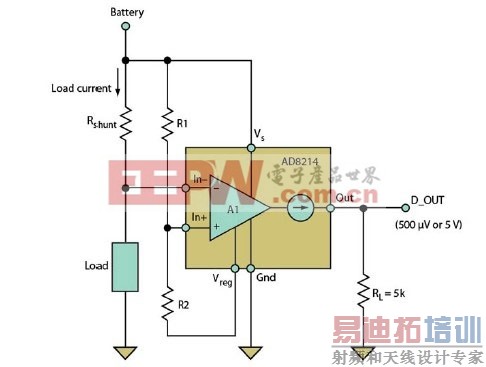
图1. 过流保护电路集成了一个快速、高共模电压阈值检测器。
该电路使用了一个高压阈值检测器AD8214。该芯片采用以电源电压为基准的2.4 V 串联稳压器,使得电路可通过汽车电池供电,同时不因电池电压变化而降低性能。此类具有电流输出的快速、高共模电压阈值检测器可以用作超快速比较器。该电路会检测控制环路高端的过流条件,并迅速关断控制环路,通过分流电阻防止过大电流对负载造成损害。
当In–超过In+时,阈值检测器输出电流小于100 nA,当超过In–时,输出电流为1 mA。即使过驱电压很小(图2)– In–),输入至输出响应时间通常也小于100 ns。迟滞(通常为10 mV)将系统噪声效应降至最低,从而防止发生误触发。

图2. 即使针对较小的过驱电压,电路的典型响应时间也低于100 ns。
工作中,小串联电阻Rshunt 中会产生压降,以将主电源电流载送至负载。该压降使比较器的反相输入相对于正电源为负值。R1 和R2 形成跨越稳压器的分压器。比较器另一输入连接至此分压器,使比较器在分流电阻的电压越过选定阈值时切换。
100 nA或1 mA 的电路输出电流驱动接地基准电阻以产生逻辑电平,该逻辑电平取决于负载电阻值RL。如RL = 5 kΩ,数字输出D_OUT 可连接至ECU,以通知负载上的报警条件。
如上所述,当In–相对于In+呈负值且比较器输出从关闭切换至开启时,10 mV 迟滞启动。因此,为将输出恢复至零,输入极性必须在原始阈值外反转10 mV。
比较器阈值电压由R1 和R2 设定。对于所需的10 A 最大电流,Ω 时,阈值输入电压为VTH = 10 A × 0.005 Ω = 50 mV。
R1和R2 上的总电压始终为2.4 V。这些电阻值可用以下公式根据所需的阈值电压来选择:
VTH = 2.4 V[R1/(R1+R2)]
为支持10 A 跳变点,R1 和R2 值分别为1.6 kΩ 和75 kΩ。
如果输入信号缓慢变化且足以影响传播延迟,对于小于μs 的斜升速率,输入端在等待输出响应期间累积的误差通常小于15 mV。
电路处理极大负载电流的能力使其可用于多种汽车电子应用。
由于AD8214 直接采用电池供电,分流电阻必须位于高端。只要电池电压在5 V 至65 V 之间,器件就能监控负载电流。
迟滞在汽车电子应用(图3)的噪声环境中也是一种资源。越过阈值时,输出迅速从低电平切换至高电平。但当输入电压恢复时,输出仅在另一个新10 mV 阈值下返回(由高至低)。

图3. 此示波图显示了迟滞值。
该电路的输出从低到高的切换非常迅速($迹线),但只有当输入电压(紫色迹线)超过迟滞时,才会切换回来。在本例中,测得的迟滞为11 mV。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:开发手机的全流程(
上)
下一篇:镇流器
射频和天线工程师培训课程详情>>
