- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于空间电压矢量电力机车四象限整流的研究
录入:edatop.com 点击:
摘要:本论文侧重于三相电压型PWM整流器及其控制系统的工程设计与实现,以提供一种较为实用的控制器设计与选取方法。论文主要内容包括算法研究、控制器设计、装置开发、样机仿真。介绍了四象限整流器为核心的电力机车系统,阐述了四象限整流器的运行原理及控制电路设计。提出一种简单的空间电压矢量算法,该算法在矢量区间判断上采用非坐标变换法进行判断,给出了在各个扇区中的矢量选择以及作用时间的计算公式。这种改进方法对SVPWM控制算法有一定程度的简化,从而使其更易于数字化实现。最后建立了Matlab/Simulink环境下的仿真模型,对上述控制算法进行了仿真,仿真结果验证了控制算法的正确性和可行性。同时,这种控制算法亦能使整流系统的能量双向流动,实现能量再生,且具有控制算法简单,直流电压利用率高的特点。
叙词:四象限;整流器;PWM;空间电压矢量 电源
Abstract:This dissertation focuses on the engineering design and realization of high power three-phase Voltage Source Rectifier (VSR) with emphasis on the control technique. The dissertation work, covering the methodology study, controller design, prototype implementation and experiment, is presented as following. Electric locomotive system mainly concentrated on 4-quardant rectifier is stated. Circulate principle and Control system design of electric locomotive 4-quardant rectifier are presented .A simplified algorithm is proposed in this paper for space voltage vectorwhich adopting non-standard vertical reference frame to judge the vector sector and calculate the action time. The ways make the calculate load of the SVPWM reduced and more easily digital applied. At last, the whole simulation module of control system is built up under the power MATLAB/SIMULINK platform and the above several ways are used in the simulation module. The result of the simulation proves that control ways are right and feasible. At the same time, from the concrete analysisthe rectifying system applied the simple algorithm can make the power bi-directional flow. Moreover, its control algorithm is easy and the range of DC utilizing efficiency is large.
Keyword:4-quardant;Rectifier;PWM;Voltage space-vector
1引言
自1879年世界上第一条电气化铁路建成以来的100余年时间内,人们不断地作出努力,试图制造出具有实用价值的交流传动电力机车。随着电力电子学和微电子技术的崛起和进步,半导体的出现和发展,使情况有了巨大的转机[1]。1964年的分谐波控制的逆变器(即现在的脉宽调制逆变器)、1973年提出的在载波整流理论的基础上研制的所谓四象限脉冲整流器、1971年提出的磁场定向控制和1985年提出的直接转矩控制方法[2],把逆变电路中的PWM技术应用于有MOSFET、IGBT等全控器件组成的整流电路,工作时可以使网侧电流正弦化,运行于单位功率因数,能量可以双向流动,真正实现绿色电能转换,因而备受关注。这种整流器称为PWM整流器[3]。综上所述,本文采用PWM四象限整流,则功率因数、能量回馈等指标都可以得到满足。因此四象限整流技术应用于电力机车成为一种科学的控制方式。
2 PWM整流器的选择
2.1四象限运行原理
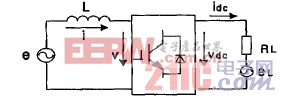
图2.1 PWM整流器模型图
图2.1所示为PWM整流器模型电路。从图可以看出:PWM整流器模型电路由交流回路、功率开关桥路以及直流回路组成。其中交流回路包括交流电动势 以及网侧电感L等;直流回路包括负载电阻 及负载电势 等;功率开关桥路可由电压型或电流型桥路组成。
当不计功率桥路损耗时,由交、直流侧功率平衡关系得[4]:
由式(2-1)不难理解:通过模型电路交流侧的控制,就可以控制其直流侧;反之亦然。其中交流侧电感吸收无功功率是由直流侧提供的,也就是说整流器需要有反馈的能力。四象限脉冲整流器能够执行脉宽调制和能量变换,即整流和反馈两方面功能[5]。作为电力牵引用的整流器,实现牵引、制动状态下的前进、后退四种工况。反馈:通过IGBT将直流能量逆变为交流,因此可以实现PWM整流器四象限运行。
2.2主电路拓扑结构
本文采用三相半桥电压型PWM整流器拓扑结构。
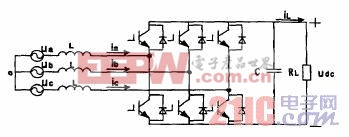
图2.2 三相半桥电压型PWM整流器
图2.2为三相半桥PWM整流器拓扑结构,其交流侧采用三相对称无中线连接方式[6],采用了6个功率开关管,这是最常用的三相PWM整流器拓扑结构。三相半桥PWM整流器较适用于三相电网平衡系统。
3系统硬件设计
3.1控制系统总体框图
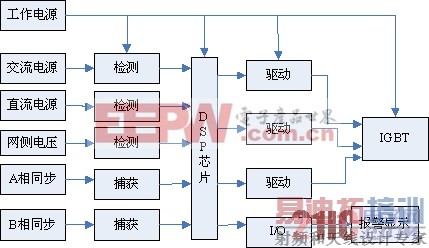
图3.1 三相电压型PWM整流器模块功能原理图
3.2检测电路设计
1、三相交流电流检测电路
定子电流检测的精度和实时性是整个矢量控制系统精度的关键,对电流检测要求精度高和速度快,本系统采用北京莱姆公司生产的LEM霍尔电流传感器模块来检测电流[7]。它的工作电压为 12V,由于霍尔输出的是弱电流信号,因此开始时得把霍尔电流信号转化为电压信号,然后再经过滤波放大处理,又由于霍尔输出的是有正反方向的电流信号,而TMS320LF2407中的A/D转换器的输入为0~+5伏的电压信号,因此得有电平偏移电路。设计中先将霍尔的电流信号通过电阻转化为电压信号,由于电流反馈具有较大的噪音纹波,因而采用低通滤波电路。然后用-5伏电压基准把正负电压信号变换为TMS320LF2407需要的单极性电压信号,为了防止电压过高或过低,设计了由二极管构成的限幅电路。如图3.2则是实现A相电流采集的电路原理图。[p]
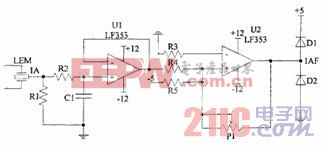
图3.2 交流电流检测电路
2.三相交流电压检测电路
感应电机交流定子电压的监测方法有光耦直接检测法和电压传感器检测法[8]。本系统采用LEM电流霍尔测压法。(即:由霍尔元件串一个电阻,然后并联到主回路,通过MAX197检测霍尔的电流大小来间接的反映直流侧电压)。其信号处理电路如图3.3。
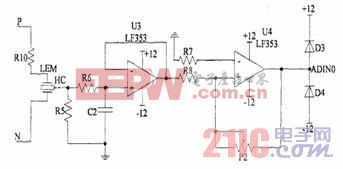
图3.3 交流电压检测电路
其中R10为25K /10W,转换比为1000:2500,当原边为10mA时,输出为25mA。同样第一级仍然是低通滤波,后一级采用比例环节把电压信号放大。
4.系统软件设计
SVPWM控制可以提高电压利用率和电动机动态响应性能。在相同的直流电压条件下,可提高网侧电压设计,相对就减少了网侧电路,降低了网侧及功率管损耗,提高运行效率,同时开关频率低,功率管损耗低。因此SVPWM控制为四象限整流最佳控制方式。
4.1控制策略
本文采用电压外环和电流内环的控制策略。首先输出直流电压与给定电压比较,然后经过PI调节器,得到三相参考电流幅值Im,将 Im与交流电压相位信号相乘后,得到参考电流信号Im, Im与实际电流比较得到电流误差,经过PI调节器,用以减缓电流在动态工程中的突变,然后再与输入电压的空间矢量进行比较控制,然后由DSP的全比较单元输出IGBT所需的控制脉冲[9]。
4.2控制原理
(1)系统区间的判断
三相电压型整流器的上桥臂和下桥臂开关状态互补,故可以用三个上桥臂的功率器件的开关状态来描述整流器的工作状态,记功率器件开通状态为“1”,关断状态为“0”,则上桥臂的开关状态有八种组合,用[a,b,c]表示上桥臂的状态[11]。对应于不同组态时输出给电机的相、线电压对应值(相对应于三相半波整流后的直流电压 )如表4.1所示。
表4.1三相电压型整流器的导通组态
A | B | C | Va(Ud) | Va(Ud) | Va(Ud) | Vab(Ud) | Vab(Ud) | Vab(Ud) |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
1 | 0 | 0 | 2/3 | -1/3 | -1/3 | 1 | 0 | -1 |
1 | 1 | 0 | 1/3 | 1/3 | -2/3 | 0 | 1 | -1 |
0 | 1 | 0 | -1/3 | 2/3 | -1/3 | -1 | 1 | 0 |
0 | 1 | 1 | -2/3 | 1/3 | 1/3 | -1 | 0 | 1 |
0 | 0 | 1 | -1/3 | -1/3 | 2/3 | 0 | -1 | 1 |
1 | 0 | 1 | 1/3 | -2/3 | 1/3 | 1 | -1 | 0 |
1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |

A,B,C之间共有八种组合,但由判断扇区的公式可知A,B,C不会同时为1或同时为0,所以实际的组合是六种,A,B,C组合取不同的值对应着不同的扇区,并且是一一对应的,因此完全可以由A,B,C的组合判断所在的扇区。为区别六种状态,令:
S=A+2B+4C (4-5)
通过查表4.2,可以判断矢量所在的扇区。
表4.2 S与扇区数N的对应关系
S | 1 | 2 | 3 | 4 | 5 | 6 |
扇区数N | 2 | 6 | 1 | 4 | 3 | 5 |
(2)矢量作用时间计算
表4.3 各扇区作用时间
扇区号 | 1 | 2 | 3 | 4 | 5 | 6 |
T1 | Z | Y | -Z | -X | X | -Y |
T2 | Y | -X | X | Z | -Y | -Z |
在每个PWM周期里非零开关向量和零开关向量的顺序的安排也是该考虑的问题。不同的切换模式发出不同的PWM波形,切换模式主要由软件来完成。切换模式有如下特点[12]:
(1)每个PWM周期内,每个PWM通道均切换两次;[p]
(2)对于每个扇区的PWM通道有一个固定的切换顺序:
(3)每个PWM周期都是以U000开始,以 U000结束。
(4)每个PWM周期内,U000 与 U111维持的时间一样长。
4.3 实现步骤
将PWM输出方式开启至方式000或者111。它们与第二类输出方式之问只有1位的差别;
(4)在减计数期间,当CMPR2和通用定时器1发生第二次匹配时,将PWM输出置回到第二类输出方式;
(5)在减计数期间,当CMPR1和通用定时器1发生第二次匹配时,将PWM输出置回到第一类输出方式。根据以上原理,我们就可以程序中实现SVPWM波形的实时生成。
5.仿真结果分析
在实验室就本控制系统进行全数字实现,图5.1为IGBT SVPWM整流的实验波形。观察可知,本系统利用PWM控制技术使输入侧电流波形接近为正弦,与输入侧电压基本同相。由于程序计算有一定的延迟,使输入侧电压与输入侧电流波形的相位发生少许偏移[15]。
图5.2为系统运行于整流状态时相应的PWM输出波形。由于本控制系统采用了二相调制方法,由图5.2可以看出在一个工作周期内,相应的IGBT在一段60 区间内保持关断状态,在另一段60 区间内保持开通状态,即有120 区间IGBT不发生动作,采用这种调制方法,使开关损耗大大降低。
图5.3是当控制系统运行于能量回馈状态时实验波形。控制系统的仿真结果与实验结果基本一致,能使三相整流器具有高功率因数和实现能量回馈,满足工业领域对整流电源的要求。
图5.1 SVPWM整流波形图 图5.2 整流状态下PWM输出波形图

图5.3能量回馈状态下的实验波形
6 总结
针对三相PWM整流器空间矢量控制在实现中存在的空间矢量定向、矢量作用时间计算、矢量位置判断等困难, 本文采用直接计算合成参考电压矢量的方法,大大简化了计算过程,便于数字实现,实验结果验证了控制算法的科学性。
参考文献
[1]王兆安、黄俊。电力电子技术(第4 版)[M].北京:机械工业出版社,2000.
[2]丁道宏. 电力电子技术. 北京:航空工业出版社,1992:10
[3]吕德忠, 杨朋, 杜太行著. 计算机控制技术. 天津:河北工业大学,1999:6
[4]吕丽红、刘志强.电压空间矢量三相整流器系统的仿真研究[J].计算机仿真,2003,19(3):36-39.
[5]董小鹏等.一种电压型PWM整流器控制方法的研究[J].电工技术学报,1998,13(5):31-38.
[6]涂从欢. 电力拖动系统中能量回馈控制的设计. 北京:电气传动, 1996:43-46
[7]吴隆安, 赖寿宏, 涂从欢. 能量回馈系统的设计与实现. 北京:电力电子技术,1995: 23-24
[8]浦志勇等.三相PWM整流器空间矢量控制简化算法的研究.电工电能新技术.2002,21(2):56-61.
[9]清源科技. TMS320LF240X DSP应用程序设计教程. 北京:机械工业出版社, 2003:7
[10]刘和平, 王维俊, 江渝, 邓力等编著. TMS320LF240X DSP C语言开发应用. 北京:北京航空航天大学出版社,2003
[11][美] Texas Instruments Incorporated 著. TMS320LF24系列DSP的CPU与外设. 北京:清华大学出版社,2004:6
[12]张雄伟, 陈亮, 徐光辉. DSP 集成开发与应用实例. 北京:电子工业出版社,2002:10
[13]张雄伟、曹铁勇.DSP芯片的原理与开发应用(第2 版)[M].北京:电子工业出版社,1996.
[14]江思敏等. TMS320LF240X小DSP硬件开发教程. 北京:机械工业出版社,2003
[15]韩利竹等. MATLAB 电子仿真与应用——工程师工具软件应用系列. 北京:国防工业出版社,2001:5
更多好文:21ic电源
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:小功率电源中的PSR控制原理简介
下一篇:增强型DC/DC隔离变压器简介
射频和天线工程师培训课程详情>>
