- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
三进三出不间断电源的并联技术
录入:edatop.com 点击:
1.前 言
不间断电源(UPS)并机系统以其扩容方便、节约投资、可靠性高而逐渐被广泛采用,并深受用户欢迎。所谓UPS并机系统是指需并联的多台UPS的输出直接并联短接在一起,同时分担负载电流,不需外加任何设备,使整个供电系统的可靠性提高,供电容量也同时得到提高。但是,并联UPS会有如下主要问题:
1) 各台UPS输出的电压、相位、频率很难严格一致,即使有1度的相位误差也可引起50%的功率差别,当空载时,某些UPS可能会运行在整流状态。
2) 由于各台UPS的输出电压、电流均为正弦量,而且有相位误差和频率误差,所以,很难实现负载分配和均流。
3) 并联运行时,若各台UPS的频率和相位相同,而幅度不同,则系统中各台UPS之间会存在无功的环流分量,严重时会使UPS保护,甚至使逆变器停止工作。
鉴于以上存在的问题,我们提出在并联系统中,把每一台UPS输出的电压、电流、频率和相位信号进行采样、综合,然后,再与其它UPS的相应信号进行综合,从而得出各自电压及频率的补偿信号,然后送至系统中的其它UPS,最终保证各台UPS输出电压的幅值、电流、相位和频率严格一致。当其中某台UPS因故障而退出时,并不影响整个并联系统的运行,因而可实现真正的N+1 台并联运行。
2.并机原理
整个UPS并机系统以数字信号处理器TMS320F240为核心,辅以必要的外围功能单元电路构成,UPS并机控制系统框图如图1所示。
数字信号处理器(DSP)通过对各种信号的检测,加以分析处理,然后送到逆变器控制电路和状态显示电路;同时,通过通信接口电路与并机系统中的其他UPS进行信息交换。
波形控制接口电路的功能是将DSP发出的控制后级UPS的逆变输出信号进行电平匹配,使其符合一定的精度和幅值要求。
相位控制接口电路的作用是将DSP发出的同步信号经过电平转换及阻抗匹配后送到后级UPS控制电路中作为UPS锁相的给定信号。

逻辑切换控制电路的功能是将DSP发出的控制信号经过电平变换后去驱动静态开关动作,完成相应的逻辑关系控制。
直流母线电流检测电路的功能是检测UPS整流输出直流母线上流过的电流大小,该直流母线电流经霍尔传感器变换,再经电平匹配电路后送到DSP的AD接口。
直流母线电压检测电路的作用是将UPS整流输出的直流母线电压变换后送到DSP的AD接口。
输出电流及输出电压检测电路的作用是将UPS的输出电压及输出电流经过交流电压互感器及交流电流互感器检测后,再经过电平转换,送到DSP的AD接口,作为DSP的控制程序对UPS的输出电压和输出电流进行实时控制的反馈量。
市电检测电路的作用是将交流市电经变换后送到DSP中,作为控制UPS电源与市电同步的给定值。
所有的检测量经AD接口送到DSP,DSP完成对各模拟参数的模拟/数字转换及数字优化滤波,滤除噪声干扰,分离出有用的信号,保证检测信号的真实性及有效性。
UPS并联控制系统的通讯接口电路将本UPS的工作状态(输出电压幅值、输出电压频率、输出电压的相位、切换逻辑要求等)送到通讯总线上,并通过通讯总线接收并联控制系统其它UPS发出的工作状态信号,作为并联系统进行均流控制、逻辑切换的重要依据。
3.并机系统结构及DSP控制软件
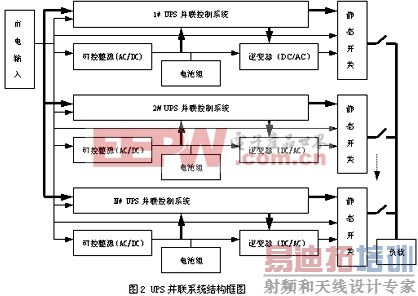
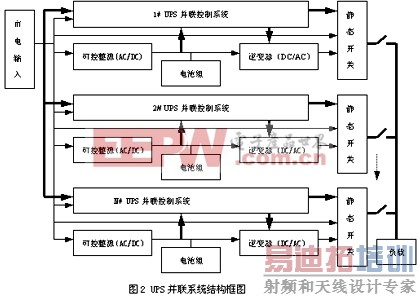
3.1 UPS并机系统结构
UPS并机系统结构框图如图2所示,并机系统中的所有UPS均通过通讯接口相连,各UPS的输出则直接并接给负载供电。
3.2 控制软件
3.2.1. DSP主程序
DSP主程序根据并联控制系统的通讯接口电路接受到的其他并联运行UPS发出的切换逻辑要求,并根据当前本机的运行状况进行相应的逻辑分析和判断,保证所有并联运行UPS的静态开关同时切换到旁路运行状态p或同时切换到逆变器运行状态,完成并机系统的逻辑切换控制。由于在并机系统的逻辑切换过程中,没有主机或从机之分,因此,任意一台处于并联运行且处于负载状态下的UPS可以从并联 运行的UPS并联系统中退出,或者任意一台处于空载状态的(或者新启动的)UPS可以并入N台并联运行的UPS并联运行系统中,实现N+1台UPS的并联运行,也就实现了N+1冗余并联运行。DSP的主程序流程图如图4 所示。
3.2.2. DSP控制子程序
DSP控制子程序根据由通讯接口电路接收到的其它并联运行的UPS发出的输出电压幅值、输出电压频率、输出电压相位等数据,以及接收到的本UPS的输出电压幅值、输出电压频率、输出电压相位等数据,经过采样处理,然后经过输出电压幅值控制算法程序、输出电压的频率算法程序、输出电压的相位算法程序等的综合运算,从而对UPS输出电压的相位、频率、幅值等参数进行实时控制,使各台并联运行的UPS输出相同的电压幅值、电压频率和电压相位,使各台UPS共同对负载供电,且实现所有并联运行的UPS平均分担负载,满足并联运行的技术要求。控制子程序流程图如图3 所示。
[p]
4.测试结果(测试方法略)
1) 空载环流
空载环流是指并机系统中任意两台UPS对应输出相之间产生的无功电流分量。1+1并机系统和N+1并机系统的空载环流均小于3A。空载环流波形如图5所示。
电流,2A/div;时间,5ms/div
图5 空载环流波形
2) 电流不平衡度
1+1并机系统的电流不平衡度小于5%,N+1并机系统的电流不平衡度小于5%。
3) 并机系统的过载及其恢复
若并机系统过载(在保护范围内),系统内所有机器统一跳旁路;当并机系统过载消失,系统内所有机器自动恢复逆变供电状态。
4) 并机系统的故障关机及故障恢复
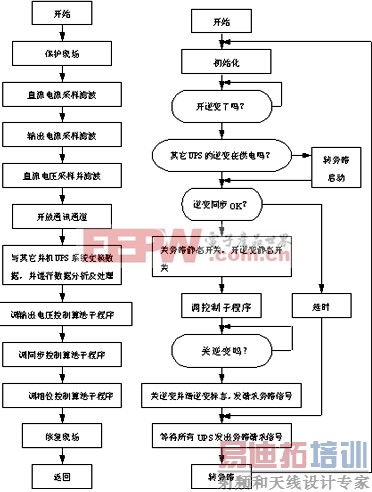
图3 控制子程序流程图 图4 主程序流程图
当并机系统内任一台UPS出现故障时,该机自动关闭输出,自动退出并机系统,而并机系统的其它UPS继续为负载供电;当故障排除后,则需按照操作步骤将该UPS并入并机系统。
5.结束语
经过小批量投入市场,该系统运行效果良好,其性能达到了预期设计目标,并且已接近或超出国外同类产品的水平。
参考文献
[1]刘和平,等。TM320LF240XDSP结构、原理及应用(第一版)。北京:北京航空航天大学出版社,2002
[2]徐科军,黄云志。定点DSP的原理、开发及应用(第一版)。北京:清华大学出版社,2002
[3]李成章。现代UPS电源及电路图集(第一版)。北京:电子工业出版社,2001
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
