- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
开关电源的实现数字化控制实现方案
录入:edatop.com 点击:
尽管业内不少人都认为,模拟和数字技术很快将争夺电源调节器件控制电路的主导权,但实际情况是,在反馈回路控制方面,这两种技术看起来正愉快地共存着。
的确,许多电源管理供应商都提供了不同的方案。一些数字控制最初的可编程优势现在甚至在采用模拟反馈回路的控制器和稳压器中也有了。当然,数字电源还是有一些吸引人之处。
本文主要讨论脉冲宽度调制(PWM)、脉冲密度调制(PDM)和脉冲频率调制(PFM)开关稳压器和控制器IC。其中一些集成了控制实际开关的一个或多个晶体管的驱动器,另一些则没有。还有一些甚至集成了开关FET,如果它们提供合适的负荷的话。因此,数字还是模拟的问题取决于稳压器的控制回路如何闭合。
图1显示了两种最常见的PWM开关拓朴布局的变化,降压和升压(buck/boost)转换器。在同步配置中,第二只晶体管将取代二极管。在某种意义上来讲,脉冲宽度调制的采用使得这些转换器“准数字化”,至少可与基于一个串联旁路元件的723型线性稳压器相比。事实上,PWM使得采用数字控制回路成为可能。不过,图1中的转换器缺少控制一个或几个开关占空比的电路,它可在模拟或数字域中实现。
不管采用模拟还是数字技术,都有两种方式实现反馈回路:电压模式和电流模式。简单起见,首先考虑它在模拟域中如何实现。

图1: 没有控制器的开关模式DC-DC电源十分简单。不论用于升压还是降压,其成功与否取决于设计者如何安排一些基本的元器件。
在电压模式拓朴中,参考电压减去输出电压样本就可得到一个与振荡器斜坡信号相比较的小误差信号(图2),当电路输出电压变化时,误差电压也产生变化,后者反过来改变比较器的门限值。反过来,这将使输出信号宽度发生变化。这些脉冲控制稳压器开关晶体管的导通时间。随着输出电压升高,脉冲宽度将变小。
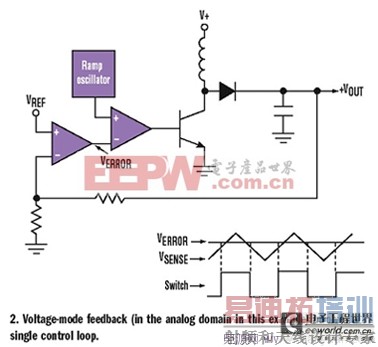
图2: 电压模式反馈(本例中在模拟域)包含一个控制回路。
电流模式控制的一个优势在于其管理电感电流的能力。一个采用电流模式控制的稳压器具有一个嵌套在一个较慢的电压回路中的电流回路。该内回路感应开关晶体管的峰值电流,并通过一个脉冲一个脉冲地控制各晶体管的导通时间,使电流保持恒定。
与此同时,外回路感应直流输出电压,并向内回路提供一个控制电压。在该电路中,电感电流的斜率生成一个与误差信号相比较的斜坡。当输出电压下跌时,控制器就向负载提供更大的电流(图3)。
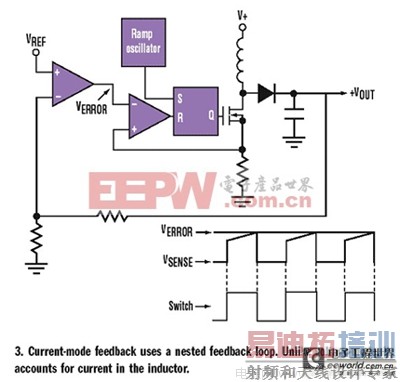
图3: 电流模式反馈采用了嵌套反馈回路。与电压模式不同,它需要计入电感上的电流。
在这些控制拓朴中,在回路的相移达到360°的任意频率处,控制回路的增益不能超过1。相移包括了将控制信号馈入反馈运放的倒相输入端所产生的固有180°相移、放大器和其它有源元件的附加延迟、以及由电容和电感(特别是输出滤波器的大电容)引入的延迟。
稳定回路要求对一定频率范围内的增益变化和相移进行补偿。传统上,采用模拟PWM来稳定电源通常需要采用经验方法:你在一块与生产型电路板相同布局的实际电路板上,实验各种无源器件的不同组合,并观察在电源电压和负载需求变化时的电路时间域响应。最近,事情已变得很简单。因为现在模拟控制器公司在其自己的型号产品上实现了首先在数字控制器上引入的各种“在寄存器中插入一个值”的功能。
数字控制回路
大多数电压模式控制的数字实现方案包括了模数转换器(ADC)、实现一些控制算法的微控制器或DSP、以及一个数字脉冲宽度调制器(DPWM),该DPWM拾取控制器输出并产生驱动执行开关动作的一个或几个晶体管所需的信号(图4)。
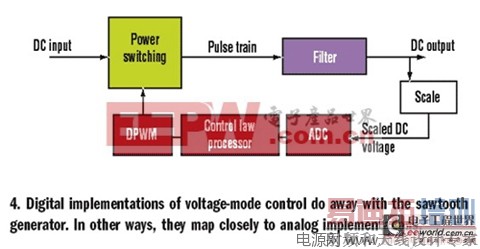
图4: 电压模式控制的数字实现消除了锯齿产生器。在其他方面,它们与模拟实现紧密对应。
首先,ADC产生馈入控制器的一系列输出电压的数字表示。控制算法是人们所熟悉的比例积分(PI)或比例积分/差分(PID)算法。
在一个PID控制器(更复杂的实例)中,每个ADC输入都要执行基于一系列系数的算法。比例系数是与灵敏度相关的增益因子。整数系数按照错误出现的时间长短来调节PWM的占空比。诱导系数补偿回路的时间延迟(相位更有效)。综合起来,PID算法的各个系数决定了系统的频率响应。
控制器随后将ADC的输出电压表示转换成维持期望的输出电压所需的脉冲持续时间(占空比)信息。然后,该信息被传送至一个DPWM,它执行与模拟PWM一样的驱动信号产生功能。
注意模拟和数字控制方案管理开关晶体管的不同。模拟控制器在时钟上升沿触发开关晶体管成ON状态,并在电压坡度达到预设的门槛电压时将晶体管触发成OFF状态;PID控制器则计算开关晶体管ON和OFF状态期间所需的持续时间。
理论上,模拟控制可以提供连续精度的输出电压。但ADC精度和采样率的交互作用再加上DPWM开关速率,使事情变得有些复杂。
例如,DPWM必须具有比ADC更高的精度。否则,ADC输出的1-LSB变化就可能导致DPWM使输出电压变化大于1-LSB。其结果是,输出电压就稳定地在两个数值之间转换,这个状态被称之为“限制性循环”。
不过,避免循环也不是轻而易举的。这是因为要提供DPWM更高的精度就意味着必须提高其脉冲速率(脉冲速率决定了在任一给定时间段能够产生多少比特)。然而,DPWM脉冲速率限制了它对所有来自控制器的比特进行压缩的时间。Artesyn白皮书中的例子介绍了一个假设的具有1MHz开关速率和10位ADC的DPWM。计算显示,调制器要求超过1 GHz的脉冲速率。
当然,如此的高速度是不切实际的,因此数字控制器的设计者必须找到另一种替代解决方案。一种方案是引入一些DPWM时钟抖动。稳压器输出过滤器对馈入的任一脉冲串进行平均,这使对每个mth输出脉冲的宽度进行相当于1 LSB的调整成为可能。
这将脉冲串的平均值增加或降低了1 LSB精度的1/m倍。如果在控制器输入端的1-LSB使输出脉冲串平均变化10mV,这将使每四个脉冲缩短相应于10 mV的时间,那么通过滤波器的平均输出电压将降低 10mV/4或2.5mV。
替代解决方法
尽管几 [p] 乎所有数字控制器采用ADC和程序存储控制器,但这并不是唯一可能的解决方案。去年,Zilker Labs注意到,达到最新Pentium级处理器所要求的阶跃响应(每毫微秒数百安),要求在控制器中采用相当快同时对功率消耗量大的DSP。
作为一种较低功耗的替代方案,该公司推出了一款基于比较器(而不是ADC)和状态机(而不是程序存储解决方案)的控制器。
此外,前述简单的降压型或升压型拓朴也不是实现数字稳压的唯一途径。Vicor提出了一种完全不同的解决方案,它基于比前述简单的降压型或升压型拓朴要复杂得多的稳压器拓朴,并重新分配了电源架构中的各个基本元素。
最后,数字控制曾是一项突破性技术,但如今数字控制的诸多好处也已出现在模拟控制稳压器中。
固有180°相移、放大器和其它有源元件的附加延迟、以及由电容和电感(特别是输出滤波器的大电容)引入的延迟。
稳定回路要求对一定频率范围内的增益变化和相移进行补偿。传统上,采用模拟PWM来稳定电源通常需要采用经验方法:你在一块与生产型电路板相同布局的实际电路板上,实验各种无源器件的不同组合,并观察在电源电压和负载需求变化时的电路时间域响应。最近,事情已变得很简单。因为现在模拟控制器公司在其自己的型号产品上实现了首先在数字控制器上引入的各种“在寄存器中插入一个值”的功能。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:浅析新材料可使锂电池负极容量提高7倍
下一篇:浅析智能机电池对策
射频和天线工程师培训课程详情>>
