- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
直流电动机的非线性控制研究
录入:edatop.com 点击:
摘要:在实际应用中,直流电机本身就是一个非线性系统,它的运行状态是一个多变量、非线性、强耦合的控制对象,从电机电流和励磁的非线性变化来看,运用非线性的控制方法应该更加合理、准确。在此,以微分几何理论为基础,采用非线性控制方法,设计了一种直流电动机的输入/输出线性化控制器,并且进行了仿真,以分析其零动态特性。对被控对象精确线性化,并给出系统所需的控制规律,具有很好的调节能力和鲁棒性。
关键词:直流电动机;非线性控制;输入/输出线性化;零动态特性
电动机把电能转换成机械能,拖动物体运动。使用者关心的是电动机是否能按照给定的速度稳定运行。影响电动机转速的因素很多,现以他励直流电动机为例,由稳态时的角速度公式可知,如果某个参数变了,为了得到不变的角速度,那么其他参数肯定要有相应的变化。电动机从一个稳态到另一个稳态的过渡过程中既有机械动态也有电磁动态过渡过程,具有非线性特性;实际上,电磁时间常数远小于机电时间常数,若忽略电磁过渡过程,就是线性系统,目前电动机的控制基本上都是按线性系统来处理的。
随着非线性控制理论发展和应用的成熟,直接按非线性系统来控制直流电动机,一定会获得更优的性能。
1 系统方程
1.1 状态方程
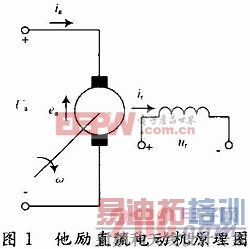
如图1所示,它励直流电动机励磁回路方程为:
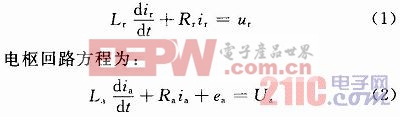

式中:Lr,Rr分别是励磁回路的电感和电阻;La,ea分别是电枢回路的电感和反电动势;TL是负载转矩,J是转动惯量。并且:
ea=kφωZ, T=kφiaZ, φ=LrirZ (4)
因能量守恒,电磁功率与全机械功率相等,即eaia=Tω。选x=[ω ia ir]T作为状态变量,选励磁电压ur为控制量,即u=ur,系统状态方程可写为:
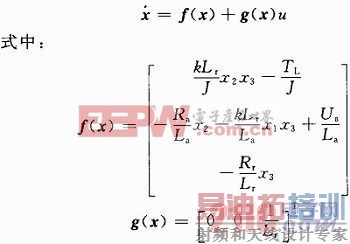 [p]
[p]
1.2 输出选择
控制目标是,给定角速度ω0,当负载变化或有扰动使角速度发生变化时,调节励磁电流ir,即状态x3,使角速度在ω0。稳定。因此,可选择输出函数为:
y=h(x)=ω-ω0=x1-ω0 (5)
系统可描述为:

2 输入/输出线性化设计
2.1 y=h(x)=x1-ω0的相对阶
当k=0时:
Lgh(x)=△hg(x)=[1 0 0]g(x)=0
当k=1时:

所以,在x2≠0的每一点,相对阶r=2。
2.2 状态方程变换
构造一组新状态变量z=[ξ1 ξ2 η]T=φ(x),使得:
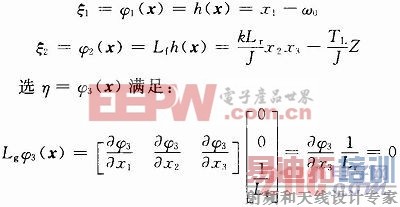
可取η=φ3(x)=X2,变换φ(x)在X2≠0的区间内定义了一个微分同胚,可将式(6)描述的非线性系统变换成如下形式:
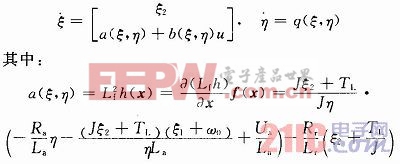
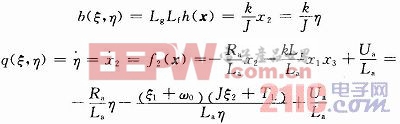
2.3 求解控制律 [p]
[p]
3 零动态稳定问题
3.1 系统的平衡点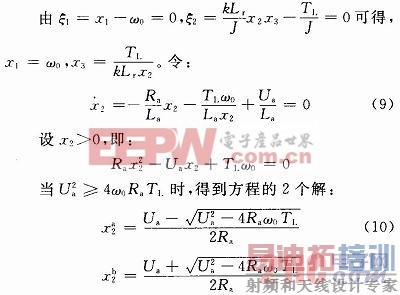
3.2 平衡点的稳定
式(8)给出的零动态方程,是![]() 平面上的一条有极小值的抛物线,如图2所示。
平面上的一条有极小值的抛物线,如图2所示。
![]()
![]()
4 仿真试验
根据上述电机数学模型建立直流电机控制系统Simulink仿真模型如图3所示。
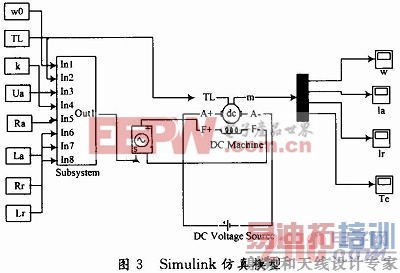
电机参数以某生产实际控制系统所用电机参数为参考:
他励直流电动机,负载转矩10 N·m,给定转速300 r/min(即10πrad/s),电枢电压300 V,电枢绕组电阻0.6Ω,电枢电感0.012 H,励磁回路电阻240 Ω,励磁回路电感120 H,电枢与励磁回路互感1.8 H,转动惯量1.0 kg·m2,电势常数取ke=3.65,不考虑粘滞摩擦系数和静摩擦转矩。
(1)起动特性。分别给定转速10π rad/s和13.33π rad/s,电机起动性能如图4所示。
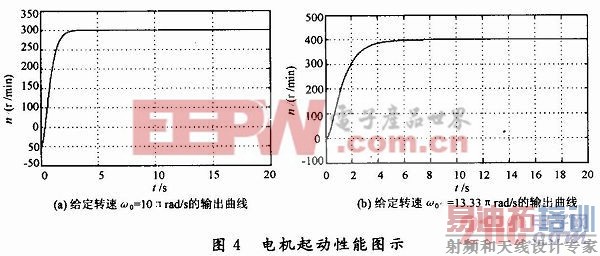
仿真结果表明,使用非线性控制算法下系统的超调量很小,转速增加平稳,曲线光滑,电机能很快,很精确地达到给定转速,并保持稳定运行状态。[p]
(2)转速突变时,直流电机运行状况仿真
在t=10 s时,给定转速由ω0=10π rad/s突变为ω0=13.33π rad/s,其他条件参数保持不变,如图5(a)所示。
仿真结果表明,在给定转速变化的情况下,直流电机调整时间短,能够迅速达到稳定,跟踪性能较好。
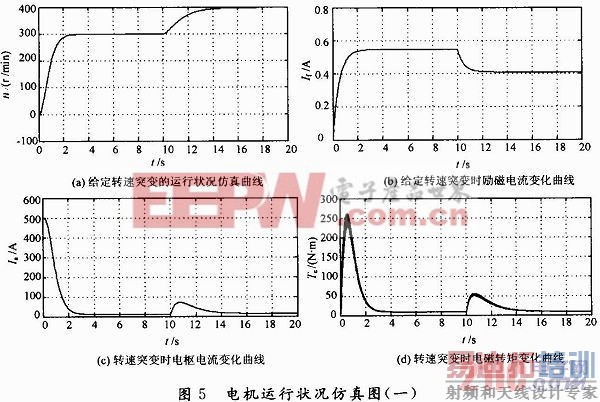
图5(b)~(d)分别是给定转速突变时励磁电流、电枢电流和电磁转矩的变化情况仿真曲线。可以看出,当给定转速变化(增大)时,励磁电流迅速发生了相应的变化(减小),通过调节磁通,使转速迅速变化到给定值,并保持稳定运行。
(3)负载转矩突增一倍直流电机运行状况仿真。在t=10 s时,负载转矩突增一倍,直流电机运行状况仿真如图6所示。
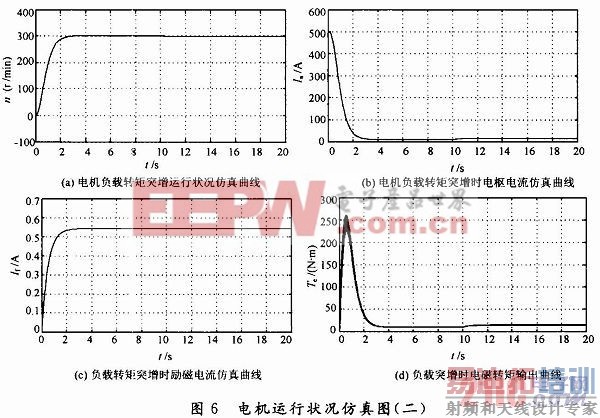
仿真结果表明,电机转速基本稳定运行在给定的初始转速(300 r/min)条件下,调节时间短,所受影响小,具有较强的稳定性和鲁棒性。
由图6(b)~(d)可以看出,当负载变化时,励磁电流发生相应的变化,电枢电流和电磁转矩的波动很小,变化平稳,能很快到达稳态,并稳定运行在要求的状态下。
5 结语
上述研究在分析直流电机数学模型的基础上,建立了电机输入输出线性化控制系统的仿真模型,逐一对他励直流电机的带负载运行状
况进行了3种工况条件下的仿真并加以分析。精确线性化方法的非线性控制器控制敏捷性好,超调量小,精确度高,稳性强,从而仿真结果具有良好的跟踪性和鲁棒性。
另外,控制模型简单明了,实现了精确控制功能,具有明显的可行性,所得结果为进一步的理论和实验研究提供了借鉴和参考。本文的不足之处在于对其设计只局限于开环系统,对闭环系统没有进行系统研究。
另外,控制器和参数联系紧密,本文只利用输入输出精确线性化的非线性控制能力来优化他励直流电机的线性控制参数,实现对他励直流电机的非线性控制方法;在实际工程中应用则需要更精确的参数设计。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:两级宽输入DC/DC变换器设计与建模分析
下一篇:频率计算法设计RCC开关电源
射频和天线工程师培训课程详情>>
