- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
解析基于DSP设计变频电源数字控制系统程序
录入:edatop.com 点击:
变频技术是电力电子技术的主要组成部分,应用于包括交流电机的调速和供电电源等多个重要领域。数字信号处理器(DSP)已广泛应用在高频开关电源的控制,采取DSP作为变频电源的控制核心,可以用最少的软硬件实现灵活、准确的在线控制。本文提出了一种基于DSP(数字信号处理器TMS320LF2407)的SPWM三相间接变频电源系统。数字信号处理器TMS320LF2407既有一般DSP芯片的特点,还在片内集成了许多外设电路,使其可以很方便地实现变频电源控制。本文中,控制系统采用了工程应用较多的正弦脉宽凋制技术,该技术具有算法简单,硬件实现容易,谐波较小等优点,可以充分发挥DSP的高速性、实时性、可靠性等方面的特点,结合相应的软件,应用一些改进的算法实现了SPWM调制,输出了质量较好、频率和幅值可任意改变的控制信号。
首先介绍了变频电源的拓扑结构以及原理,设计了以三菱IPM模块为基础的包括整流电路、逆变电路、输出滤波器的主回路。在分析了SPWM调制原理的基础上,提出了改进型的规则采样法产生SPWM波。另外并对死区产生的影响做了分析,并给出了两种补偿方法。 在变频电源数字控制器国内外研究的基础上,提出了一种基于数字信号处理器(DSP)的控制器硬件结构,并对控制器的实时性、可靠性和兼容性作了详细的分析。为满足高速和精确的采样,论文在控制器硬件中设计了锁相环电路。为满足智能功率模块(IPM)对死区时间的要求,在对电路仿真分析的前提下,论文在控制器硬件中设计了独立的硬件死区延时电路。 控制器的系统软件设计分为人机接口程序和控制程序。人机接口程序实现了实时电压电流数据及其波形显示,控制参数显示及在线修改等功能;控制程序实现了信号采样分析、PWM脉冲调制和触发、PI控制器等程序。
1 系统的结构
图l为变频电源基本控制电路硬件框图。变频电源采用高频SPWM技术和通用电压型单相全桥逆变电路,选取ICBT功率模块作为开关器件,控制电路采用全数字化设计。
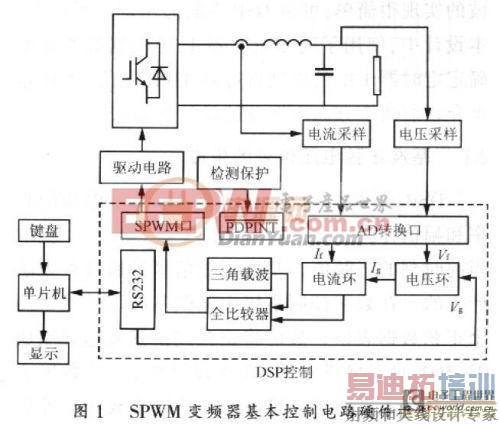
输出电压和电感电流通过采样网络,将输入信号转换为TMS320LF2407所需要的电平,接至TMS3201F2407的A/D转换口。通过键盘键入所要求的输出电压值、频率值,由SCI模块与DSP实现通讯。得到逆变器当前工作的基准电压信号,经过电压电流调节器获得实际的正弦调制信号,与DSP定时器产生的三角波载波信号相交截,输出带有一定死区的驱动控制信号,经驱动单元进行隔离放大后送到IGBT。DSP可以把当前时刻的输出电压、频率值送给单片机并在8位LED上显示出来。为了保证过压、欠压、过流(过载)的情况下能有效地保护功率开关和负载,在本系统中设置了保护电路,一旦出现故障,PDPINT引脚为低电平状态,封锁驱动脉冲控制信号,切断变频电源输出。
2 SPWM原理
在进行脉宽调制时,使脉冲系列的占空比按正弦规律来安排。当正弦值为最大值时,脉冲的宽度也最大,而脉冲间的间隔则最小,反之,当正弦值较小时,脉冲的宽度也小,而脉冲间的间隔则较大,这样的电压脉冲系列可以使负载电流中的高次谐波成分大为减小,称为正弦波脉宽调制。
PWM的全称是Pulse Width Modulation(脉冲宽度调制),它是通过改变输出方波的占空比来改变等效的输出电压。广泛的用于电动机调速和阀门控制,比如我们现在的电动车电机调速就是使用这种方式。所谓SPWM,就是在PWM的基础上改变了调制脉冲方式,脉冲宽度时间占空比按正弦规率排列,这样输出波形经过适当的滤波可以做到正弦波输出。它广泛的用于支流交流逆变器等,比如高级一些的UPS就是一个例子。三相SPWM是使用SPWM模拟市电的三相输出,在变频器领域被广泛的采用。
2.1 实施SPWM的基本要求(1)必须实时地计算调制波(正弦波)和载波(三角波)的所有交点的时间坐标,根据计算结果,有序地向逆变桥中各逆变器件发出“通”和“断”的动作指令。
(2)调节频率时,一方面,调制波与载波的周期要同时改变(改变的规律本文不作介绍);另一方面,调制波的振幅要随频率而变,而载波的振幅则不变,所以,每次调节后,所胶点的时间坐标都 必须重新计算。
要满足上述要求,只有在计算机技术取得长足进步的20世纪80年代才有可能,同时,又由于大规模集成电路的飞速发展,迄今,已经有能够产生满足要求的SPWM波形的专用集成电路了。
3 SPWM波的软件设计
变频电源研制的核心是SPWM波的生成,可利用DSP通过软件来实现,系统采用了双闭环反馈的控制策略,其外环为输出电压反馈,电压调节器一般采用PI形式,电感电流反馈构成内环,电流环设计为比例环节。由图l可以看出,输出电压的信号经调理采样生成Vf后直接反馈,与参考正弦电压Vref比较后,经PI调节后作为电流内环的给定信号Ig。其与电感电流反馈值If比较得到的误差经P调节,作为调制波与三角载波进行交截产生SPWM开关信号。为了便丁变频器在线调试,所生成的SPWM波调制比必须可在一定范围任意改变,且误差较小。由上所述,可知SPWM波的生成涉及3个方面:获得参考止弦电压Vref、实现电压电流双闭环控制、产生三角载波。其中,三角载波的实现很简单,可由DSP中的通用定时器产生,本设计中,使用了通用定时器l,可根据载波频率确定定时器l中的周期寄存器TIPR的值。下面着重介绍前两个方面所涉及的没计和算法。
3.1基准正弦电压信号的生成
正弦信号源在实验室和电子工程设计中有着十分重要的作用,而传统的正弦信号源根据实际需要一般价格昂贵,低频输出时性能不好且不便于自动调节,工程实用性较差。综合分析各项指标的测试结果发现,该设计频率变化范围大,信号稳定度高,失真度好,达到了性能良好的设计要求。
DSP实时地从单片机读取所需要的电压的频率和幅值作为当前输出电压的基准(给定)。获取当前时刻的正弦值,基准正弦信号是通过查表法产生的。在数字控制系统中正弦基准信号就是一个正弦数据表格,故应将正弦波按其表达式制成0°~360°的表格供查用,在本设计中,正弦数据表格中数据点数选为1024,可将其数值放在片外数据存储器。有如卜关系式:

式中:fs为当前时刻调制频率;
t为采样时刻;
N为当前时刻处在整个调制周期的第N个脉冲。
由于本系统系变频电源,即fS是在变化的,且系统采用的是异步调制,所以N也是随fS变化而变化的。由此必须实时变化定时时间T以确保整个周期的脉冲数最大限度地接近整数,以避免或减少输出波形含有基波的子谐波;此外,还须实时地改变脉冲序列,以保证输出电压值不发生较大的跳变。
3.1.1 实时改变定时时间
假设fS=400 Hz,则频率凋制比Mf为

由于整个周期的脉冲数NE超过1,所以NE只能选用定标为Q0,即NE只能为整数,所以NE=62,从而在脉冲数上出现了相差了O.5个,反映在桥臂输出电压上,有正负输出所含的脉冲数不相同。由此会产生基频的子谐波。
如果我们以当前的脉冲数NE回推出开关频率,则有fc=62x400=24.8kHz,这样确定的开关频率,就最大限度地保汪了正负调制周期的脉冲数近似相同。设计中,定时器1的工作方式设定为连续增减计数方式,故 其中fcpu=20 MHz为时钟频率,开关频率25 kHz时可得定时时间T为40μs,T1PR为400;而开关频率为24.8 kHz时可得定时时间T为40.65μs,T1PR为403.225,T1PR定标为Q0,所以只能为整数403,故求得频率调制比
其中fcpu=20 MHz为时钟频率,开关频率25 kHz时可得定时时间T为40μs,T1PR为400;而开关频率为24.8 kHz时可得定时时间T为40.65μs,T1PR为403.225,T1PR定标为Q0,所以只能为整数403,故求得频率调制比 ,所以正负调制周期的脉冲数相差极少,为0.035,这样就最大限度的消除了基频的子谐波。
,所以正负调制周期的脉冲数相差极少,为0.035,这样就最大限度的消除了基频的子谐波。
3.1.2 实时改变脉冲序列
脉冲序列是一种连续有序输出的具有二进制数特点的脉冲队列,它可通过一路或多路同步输出。
当频率不发生改变时,DSP按原来的输出序列(N=1,2,…NE)循环输出脉冲,设在第N个周期时,频率发生改变,则DSP应按新的脉冲序列(N′=l,2,…NE′)输出脉冲。
图2中,在N=25时刻频率从500Hz变化到250Hz,由于N=25对应输出频率500Hz为零点处,对应于输出频率250Hz为正峰值处,所以如果不改变输出脉冲序列,则会导致输出电压相位和电压值都出现跳变,如图2(a)所示;图2(b)中按一定的规律改变输出脉冲序列,输出电压相位和电压值就不会出现跳变。为了保证在频率切换过程中电压的相位变化最小,输出电压值不发生较大的跳变,应按下式来确定新的脉冲序列中起始的脉冲序号N′,即令:

[p] 具体流程如图3所示。

图4为电压、电流双闭环数宁控制流程图。在实际应用中,考虑到一些具体情况,还需对电压调节器的数字PI调节及电流调节器的数字P调节加以一定的限制,针对不同的情况采取最佳控制方法。故在图4中(1)、(1’)、(2)、(3)、(3’)处采用了一些改进算法及策略,下面分别加以简单介绍。
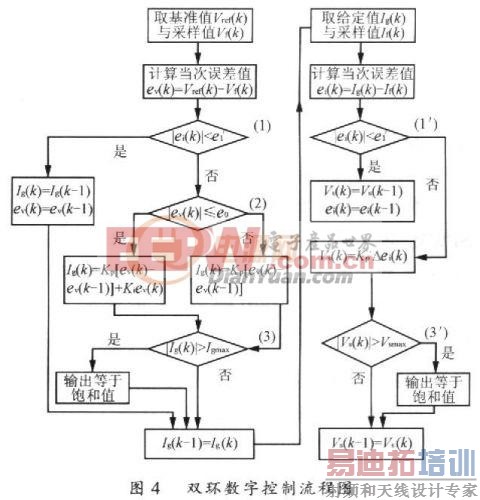
在图4中(1)和(1’)处设置了死区,冈为在输出变化较小时,通过计算得到的PWM控制寄存器的值可能也会有小幅度的振动,这样会使系统不稳定。若设置适当的死区范围,则可以消除由此引起的振荡,又不会太大影响输出精度。根据实际情况分别设定最小输入偏差量e1(e1’),即当|ev(k)|e1(|ei(k)|e1’时,控制最保持不变,跳过PI运算或P运算;图4中(3)和(3’)处对相应的输出值进行了限幅,这是由于当PI调节器或P调节器中输出值很大时,不仅容易造成控制规律错误,而且可能引起系统损坏,输出限幅可以避免上述情形的发生:PI调节引入积分环节的目的是为了消除静差,提高精度,但当被控量与设定值的偏差较大时会造成PI运算的积分积累,引起系统较大的超调,稳定性减弱。故在图4中(2)处对PI控制积分分离,设置偏差阈值e0,当|ev(k)|>e0,取消积分作用,用P控制,当|ev(k)|≤e0,引入积分作用,这样既保持了积分作用,又减小超调量。使系统的控制性能有很大改善。
4 实验结果
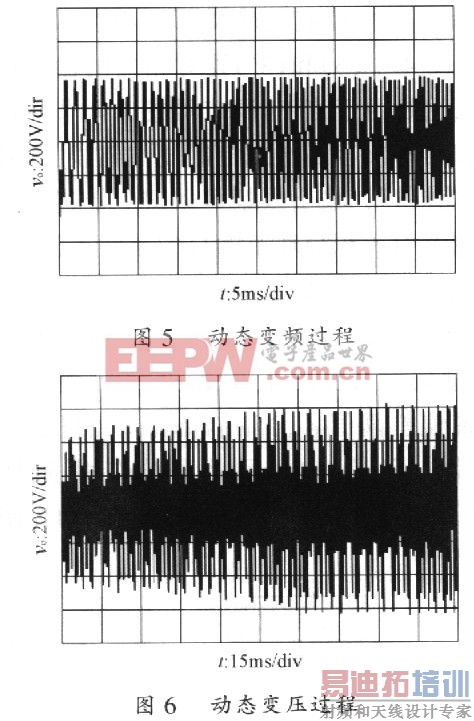
根据上述基本编程思路,编制了一个凋制比N可任意改变的通用SPWM产生软件,只要通过按键输入相应的数据,就可以根据负载的需要产生任意输出频率和电压幅值的SPWM波。研制了一台容量为5000VA的变频器样机,并进行了实验,实验结果表明,输出电压波形光滑,波形失真度低,输出电压的THD≤2%。图5中,通过实时改变给定频率以调节输出电压频率,频率由低逐渐增高,图6中,通过实时改变给定电压幅值以调节输出电压,电压由低逐渐增高。从频率、电压的动态过程可以看出系统实现了实时变频和变压。
5 结语
数字信号处理器(DSP)做某些模拟工作比模拟电路要出色,因此得以生存。在某些情况下,由于成本或复杂性的原因,任务甚至不能考虑用模拟电路,DSP仍然是一种可行的选择,在很多情况下可以轻松地完成那些任务。这是因为DSP进行算术运算既好又快,如加法和乘法。聪明的数学家和工程师利用了这一实际,通过创造算法来解决主要采用两种数、运算的复杂的信号处理任务。本文以DSP作为主控芯片,设计并实现了SPWM变频电源数字化控制,该方式控制灵活、调试方便、可靠性高。在使用双闭环控制策略的变频电源中,应用适合于DSP特点的一些算法,编程产生了可以变频变压的SPWM波信号,设计的方法是可行的。数字化使得系统具有很强的可编程性,这样系统更易于更新和升级,并获得了比较好的实验效果。为了更好地理解各种DSP芯片的可用选项以及器件各部分是如何配合作为一个整体,分析当今市场上几种有代表性的DSP是有帮助的。我们将仔细研究单核、单核加微控制器以及多核DSP芯片的例子。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:太阳能光伏组件致命伤害-热斑效应
下一篇:ZXPIS智能电力综合监控系统解决方案
射频和天线工程师培训课程详情>>
