- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
并联逆变器功率均分控制研究
录入:edatop.com 点击:
1 引言
近年来逆变器并联的研究成为电力电子研究的一个热点,其控制方案也很多,但无论是那种方案其最终目的都是使并联的逆变器之间均分负载功率,包括有功功率和无功功率,其中常用的一种控制方案[1]是基于有功功率差和无功功率差的调节法,计算出有功功率差和无功功率差,把有功功率差作为相位补偿,无功功率差作为幅值补偿,通过对基准信号频率和电压的微调,使各逆变器的相位差、幅值差为零,实现负载均分。这种控制方案的理论基础是认为闭环系统逆变器的等效输出阻抗呈纯感性,因而输出的有功功率差是由相位差引起的,无功功率差是由幅值差引起的。本文对闭环系统的输出阻抗进行了分析,结果表明其输出阻抗并不是纯感性的,而且输出阻抗的电阻值和电感值的比例是随着电路参数的变化而变化。本文运用这一结论改进了基于有功功率差和无功功率差的调节法,并给出了改进前和改进后的比较波形。
2 逆变器并联的理论分析
2.1 单台逆变器的模型分析
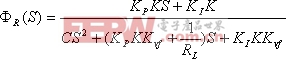
本文采用电压电流双闭环控制的半桥逆变器,如图1所示为双闭环控制系统的控制模型,其中外环为输出电压瞬时值反馈的电压环,采用PI调节,内环为电感电流瞬时值反馈的电流环,采用滞环调节,ug为电压基准,uvf为反馈电压,Kvf为电压反馈系数,KP、KI为PI调节器的比例系数和为积分系数,K为电流反馈系数的倒数,d为滞环环宽,iif为反馈电流, RL为负载,L、C为输出滤波电感和滤波电容。为了简化分析,假设电流内环用一比例环节等效,则等效的比例系数为K。令空载闭环传递函数为Ф∞(S),带阻性负载的闭环传递函数为ФR(S),逆变器等效输出阻抗为ZO(S),w为输出角频率,则:
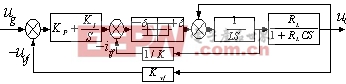
图1 双闭环逆变器控制系统模型
 (1)
(1)
 (2)
(2)
 (3)
(3)
等效输出电阻R和等效输出电抗X分别为:
 (4)
(4)
 (5)
(5)
其中
则:
 (6)
(6)
根据式(6)可得逆变器等效输出电阻和电感比值F与KP、KI、K、Kvf和C的关系如图2所示,其中:
图2(a)为KP=9.2,,KI=3.6ⅹ104,K=5.38,Kvf=0.028时逆变器等效输出阻抗的电阻和电感比值与C的变化曲线
图2(b)为KI=3.6ⅹ104,K=5.38,Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与KP的变化曲线
图2(c)为KP=9.2,,KI=3.6ⅹ104, Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与K的变化曲线
图2(d)为KP=9.2,,K=5.38,Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与KI的变化曲线
图2(e)为KP=9.2,,K=5.38,KI=3.6ⅹ104,C=30uF时逆变器等效输出阻抗的电阻和电感比值与Kvf的变化曲线
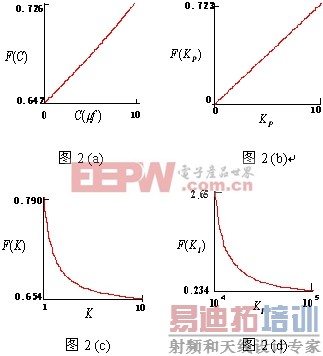
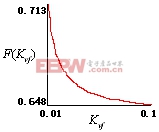
图2 (e)
从图2得出逆变器等效输出电阻和电感比值随着C、KP的增大而增大,而随着K、Kvf和KI的增大而减少
[p] 2.2 并联逆变器功率分析
两台逆变器并联模型如图3所示,R1、R2为逆变器等效输出电阻,X1,、X2为等效输出电抗,UO1∠φ1,、 UO2∠φ2分别为两台逆变器输出电压,UO∠0O为并联母线上的电压,RL为负载[2]。

图3 逆变器并联运行原理图
逆变器1输出复功率为:
 (7)
(7)
可推导出逆变器1输出有功功率PO1和无功功率QO1表达式:
 (8)
(8)
 (9)
(9)
相位差 很小有
很小有 ,为了简化分析,令
,为了简化分析,令 ,可推导得两台逆变器的有功差
,可推导得两台逆变器的有功差 和无功差
和无功差 的表达式:
的表达式:
 (10)
(10)
 (11)
(11)
当 时:
时:  (12)
(12)
当式:  (13)
(13)
由式(12)和式(13)可得当并联逆变器的输出电压幅值有差时,有功功率差和无功功率差的比值等于等效输出阻抗的电阻和电感的比值,当并联逆变器的输出电压相位有差时,有功功率差和无功功率差的比值等于等效输出阻抗的电阻和电感比值倒数的负数。因而在实际电路中可以通过改变并联逆变器的幅值差或相位差检测出其有功功率差和无功功率差,再根据式(12)或式(13)得出逆变器等效输出阻抗的电阻和电感比值。
当 时,有:
时,有:
 (14)
(14)
 (15)
(15)
可以通过调节C、KP、K、Kvf和KI使R=X,由式(14)和式(15)可以根据并联逆变器输出的有功功率差和无功功率差来对输出电压的相位和幅值进行调节。
[p] 3 试验结果
试验装置为两台100VA半桥逆变器,输入电压为180VDC,输出电压为53V/ 400Hz。其中KP=8.5, KI=3.8ⅹ104,K=5.38,Kvf=0.028,C=30uf。表1为两台逆变器输出电压的相位相等时,幅值差和输出有功功率差和无功功率差的变化关系。表2为两台逆变器输出电压的幅值相等时,相位差和输出有功功率差和无功功率差的变化关系。从表1和表2可以看出无论是改变输出电压的幅值差还是相位差,其有功功率差和无功功率差比值的绝对值都为1,根据式(12)和式(13)可推导出这组电路参数其等效输出阻抗中R=X,因而可以根据式(14)和式(15)对并联逆变器输出电压的相位和幅值进行调节。图4(a)为根据传统的输出的有功功率差是由相位差引起的,无功功率差是由幅值差引起的理论基础实现的并联控制的输出波形,图4(b)为根据本文的理论改进后实现的并联控制的输出波形。其中CH1和CH2为两台逆变器的输出电流波形,CH3为输出电压波形。从图4(a)可看出改进并联控制前输出电流偏差为6%,从图4(b)可看出改进后的输出电流偏差为1%,可见改进后的环流量更小了。
表1
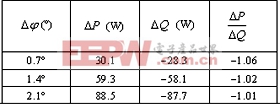
表2
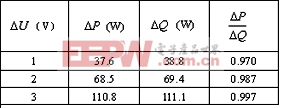
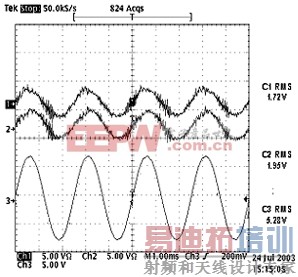
图4 (a) 改进前并联输出电压和电流波形
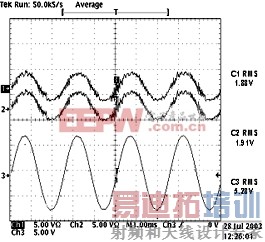
图4 (b) 改进后并联输出电压和电流波形
参考文献
[1] 段善旭,模块化逆变电源全数字化并联控制技术研究,华中理工大学博士学位论文,1999.9
[2] 胡文斌,基于DSP的逆变器并联控制,全国特种电源元器件年会论文集,2002.5
近年来逆变器并联的研究成为电力电子研究的一个热点,其控制方案也很多,但无论是那种方案其最终目的都是使并联的逆变器之间均分负载功率,包括有功功率和无功功率,其中常用的一种控制方案[1]是基于有功功率差和无功功率差的调节法,计算出有功功率差和无功功率差,把有功功率差作为相位补偿,无功功率差作为幅值补偿,通过对基准信号频率和电压的微调,使各逆变器的相位差、幅值差为零,实现负载均分。这种控制方案的理论基础是认为闭环系统逆变器的等效输出阻抗呈纯感性,因而输出的有功功率差是由相位差引起的,无功功率差是由幅值差引起的。本文对闭环系统的输出阻抗进行了分析,结果表明其输出阻抗并不是纯感性的,而且输出阻抗的电阻值和电感值的比例是随着电路参数的变化而变化。本文运用这一结论改进了基于有功功率差和无功功率差的调节法,并给出了改进前和改进后的比较波形。
2 逆变器并联的理论分析
2.1 单台逆变器的模型分析
本文采用电压电流双闭环控制的半桥逆变器,如图1所示为双闭环控制系统的控制模型,其中外环为输出电压瞬时值反馈的电压环,采用PI调节,内环为电感电流瞬时值反馈的电流环,采用滞环调节,ug为电压基准,uvf为反馈电压,Kvf为电压反馈系数,KP、KI为PI调节器的比例系数和为积分系数,K为电流反馈系数的倒数,d为滞环环宽,iif为反馈电流, RL为负载,L、C为输出滤波电感和滤波电容。为了简化分析,假设电流内环用一比例环节等效,则等效的比例系数为K。令空载闭环传递函数为Ф∞(S),带阻性负载的闭环传递函数为ФR(S),逆变器等效输出阻抗为ZO(S),w为输出角频率,则:
等效输出电阻R和等效输出电抗X分别为:
其中
则:
根据式(6)可得逆变器等效输出电阻和电感比值F与KP、KI、K、Kvf和C的关系如图2所示,其中:
图2(a)为KP=9.2,,KI=3.6ⅹ104,K=5.38,Kvf=0.028时逆变器等效输出阻抗的电阻和电感比值与C的变化曲线
图2(b)为KI=3.6ⅹ104,K=5.38,Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与KP的变化曲线
图2(c)为KP=9.2,,KI=3.6ⅹ104, Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与K的变化曲线
图2(d)为KP=9.2,,K=5.38,Kvf=0.028,C=30uF时逆变器等效输出阻抗的电阻和电感比值与KI的变化曲线
图2(e)为KP=9.2,,K=5.38,KI=3.6ⅹ104,C=30uF时逆变器等效输出阻抗的电阻和电感比值与Kvf的变化曲线
从图2得出逆变器等效输出电阻和电感比值随着C、KP的增大而增大,而随着K、Kvf和KI的增大而减少
[p] 2.2 并联逆变器功率分析
两台逆变器并联模型如图3所示,R1、R2为逆变器等效输出电阻,X1,、X2为等效输出电抗,UO1∠φ1,、 UO2∠φ2分别为两台逆变器输出电压,UO∠0O为并联母线上的电压,RL为负载[2]。
逆变器1输出复功率为:
可推导出逆变器1输出有功功率PO1和无功功率QO1表达式:
相位差
当
当
由式(12)和式(13)可得当并联逆变器的输出电压幅值有差时,有功功率差和无功功率差的比值等于等效输出阻抗的电阻和电感的比值,当并联逆变器的输出电压相位有差时,有功功率差和无功功率差的比值等于等效输出阻抗的电阻和电感比值倒数的负数。因而在实际电路中可以通过改变并联逆变器的幅值差或相位差检测出其有功功率差和无功功率差,再根据式(12)或式(13)得出逆变器等效输出阻抗的电阻和电感比值。
当
可以通过调节C、KP、K、Kvf和KI使R=X,由式(14)和式(15)可以根据并联逆变器输出的有功功率差和无功功率差来对输出电压的相位和幅值进行调节。
[p] 3 试验结果
试验装置为两台100VA半桥逆变器,输入电压为180VDC,输出电压为53V/ 400Hz。其中KP=8.5, KI=3.8ⅹ104,K=5.38,Kvf=0.028,C=30uf。表1为两台逆变器输出电压的相位相等时,幅值差和输出有功功率差和无功功率差的变化关系。表2为两台逆变器输出电压的幅值相等时,相位差和输出有功功率差和无功功率差的变化关系。从表1和表2可以看出无论是改变输出电压的幅值差还是相位差,其有功功率差和无功功率差比值的绝对值都为1,根据式(12)和式(13)可推导出这组电路参数其等效输出阻抗中R=X,因而可以根据式(14)和式(15)对并联逆变器输出电压的相位和幅值进行调节。图4(a)为根据传统的输出的有功功率差是由相位差引起的,无功功率差是由幅值差引起的理论基础实现的并联控制的输出波形,图4(b)为根据本文的理论改进后实现的并联控制的输出波形。其中CH1和CH2为两台逆变器的输出电流波形,CH3为输出电压波形。从图4(a)可看出改进并联控制前输出电流偏差为6%,从图4(b)可看出改进后的输出电流偏差为1%,可见改进后的环流量更小了。
参考文献
[1] 段善旭,模块化逆变电源全数字化并联控制技术研究,华中理工大学博士学位论文,1999.9
[2] 胡文斌,基于DSP的逆变器并联控制,全国特种电源元器件年会论文集,2002.5
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:简易电池自动恒流充电电路介绍
下一篇:微弱电流的交流恒定电流源电路
射频和天线工程师培训课程详情>>
