- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
离散滑模控制在UPS逆变器设计中的应用
录入:edatop.com 点击:
1 引言
UPS(Uninterruptible power supply)即不间断电源,是一种介于交流电网和负载间的电力电子装置,其基本功能是当交流电源失电时,保证对负载不间断的供电、确保负载连续正常运行。现代UPS还应具备输出高品质电能、对电网的影响小、智能化程度高等特点。
UPS的控制思想上有基于线性控制理论和基于非线性控制理论的两类控制策略, 其中非线性控制理论主要采用滑模控制、重复控制、无差拍控制。滑模控制系统具有较强的鲁棒性,即对被控对象模型误差,参数变化和外部扰动具有极好的不敏感性,但传统的连续滑模控制在实际应用中存在系统抖动问题,会产生大量谐波,因此无法在UPS系统中得到广泛应用。随着近年来离散滑模控制理论和数字控制技术的发展,大幅度的缩短了采样时间,提高了系统的切换频率,从而有效的消除了抖动现象。在UPS逆变器设计中采用离散滑模控制,可以提高UPS的可靠性和可利用性,满足现代UPS系统较高的性能要求。[2][3]
2 UPS系统构成
UPS系统主要由整流器,蓄电池组和逆变器组成。其中UPS的逆变器主电路采用全桥逆变电路,并带有L-C滤波器,通过控制逆变器输出和负载间的静态开关,使市电停电时,蓄电池组和逆变器能持续为负载供电。系统简化原理图如图1所示。
为了提高系统的切换频率,消除抖动现象,UPS的核心控制器件选用TI公司的DSP TMS320LF2407,其指令周期为33ns,带有模数转换,串行外设接口,串行通信接口模块,事件管理器等的外围模块,16位定点内核和指令集,其指令集源码向上兼容TMS320C5x系列,具有良好的可移植性,其内核的高性能运算能力,使其能够运行复杂的控制算法,提高了控制器的灵活性和逻辑判断能力,从而使系统性能更为优越。[4]
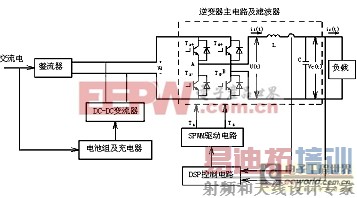
图1 单相在线式UPS系统
在逆变器及其输出滤波电路中,电感电流 和电容电压
和电容电压 是可控变量,未知的负载电流
是可控变量,未知的负载电流 可视为外部干扰。假设开关频率远高于调制频率,即可得到UPS逆变器状态空间方程:
可视为外部干扰。假设开关频率远高于调制频率,即可得到UPS逆变器状态空间方程:
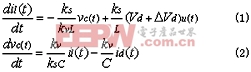
其中 表示系统控制输入。
表示系统控制输入。 ,
, 分别表示电流传感器和电压传感器增益。
分别表示电流传感器和电压传感器增益。 表示直流母线电压标称值。
表示直流母线电压标称值。
在实际应用中,UPS必须拥有优良的性能,如抗干扰,电压波形失真较小,良好的跟踪性能,能够在非线形负载或者过流的情况下正常工作。本文即为满足UPS逆变器这些要求而设计一个具有双环结构的离散滑模控制器。
[p] 3 逆变器控制设计
逆变器采取双环结构设计,由电流预测器和电流控制器组成,且两者分别设计各自的切换平面,均采用自由顺序控制方法。电流预测器应具有比电流控制器更快的响应且对负载变化不敏感。电流控制器将具有单边行为特性以有效的消除了以前采用连续滑模控制时出现的抖动现象。电流预测器通过跟踪输出电压的误差估计出所需的电感电流,电流控制器则用来调节电感电流并产生PWM逆变器的控制信号。这样,逆变器将具有限流和固定切换频率的特性。其控制系统方框图如图2所示。
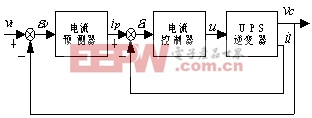
图2 控制系统方框图
3.1 电流预测器设计
为了消除输出电压的静态误差,在系统滑模平面设计中,加入误差积分项 ,得到状态方程
,得到状态方程

其中 为参考控制量,
为参考控制量, 为积分增益
为积分增益
与(2)联立后,设采样周期为T,可得到离散系统方程

其中 为前馈自相关系数,
为前馈自相关系数, 的确定将保证在滑模超平面上系统状态趋于稳定。
的确定将保证在滑模超平面上系统状态趋于稳定。
电流预测器控制项为

得到控制项。
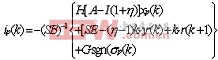 (11)
(11)
3.2 电流控制器设计
将(1)离散化,其中采样周期为T,可得
 (12)
(12)
系统的滑模函数可选为
 (13)
(13)
其中 为跟踪误差
为跟踪误差
则电流控制器控制项为
 (14)
(14)

滑模运动存在性证明与上文相似,并可得到满足条件0r>1,则系统可在无抖动情况下达到滑模平面。并可得其控制项为
 (15)
(15)
[p] 4 仿真结果
现设计一1KVA的单相逆变器,其参数如下:

采用TI提供的TMS320LF2407评估板以及第三方公司专门为TI的2000系列DSP设计的仿真软件VisSim/ECD,可进行相应算法的在线仿真并生成相应的目标文件C语言源代码。仿真后,得到系统在一次投入和卸掉满载时的电压电流波形如图3所示,结果表明,控制器在负载变化情况下,显示出良好的鲁棒性,并在短时间内恢复正常,在稳态运行中具有良好的跟踪性能,满载情况下,电压维持在99%以上。另外,在非线形负载情况下,控制器也表现出良好的电压调节性能。
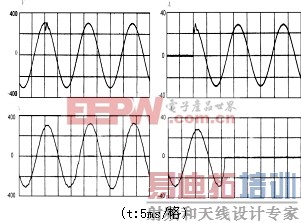
图3.系统在投入和卸掉满载时的仿真结果
5 结论
本文提出了一种应用于UPS逆变器设计的离散滑模控制算法,设计采用双环结构,并具有限流和固定切换频率的特点,达到了消除抖动的目的。仿真结果表明系统能够有效的抑制输出电压波形失真,具有良好的电压调节性能以及带载能力强等特点。
参考文献
[1] 高为炳 变结构控制的理论及设计方法[M].北京:科学出版社.1996
[2] 田宏奇 滑模控制理论及其应用[M].武汉:武汉出版社.1995
[3] 李成章 现代UPS电源及电路图集[M].北京:电子工业出版社.2001
[4] Texas Instruments Inc.TMS320CLF240xA DSP Controllers Reference Guide[Z].
Texas Instruments Inc., 2001
[5] Tzuen-Lih Chern et al. Microprocessor-Based Modified Discrete Internal Variable-Structure Control for UPS[J].
IEEE Trans Ind.Electron,1999,46(2):341-347
[6] 胡庆等 滑模变结构控制在DC-DC变换器中的应用[J].沈阳工业大学学报,2002,24(2):57-60
UPS(Uninterruptible power supply)即不间断电源,是一种介于交流电网和负载间的电力电子装置,其基本功能是当交流电源失电时,保证对负载不间断的供电、确保负载连续正常运行。现代UPS还应具备输出高品质电能、对电网的影响小、智能化程度高等特点。
UPS的控制思想上有基于线性控制理论和基于非线性控制理论的两类控制策略, 其中非线性控制理论主要采用滑模控制、重复控制、无差拍控制。滑模控制系统具有较强的鲁棒性,即对被控对象模型误差,参数变化和外部扰动具有极好的不敏感性,但传统的连续滑模控制在实际应用中存在系统抖动问题,会产生大量谐波,因此无法在UPS系统中得到广泛应用。随着近年来离散滑模控制理论和数字控制技术的发展,大幅度的缩短了采样时间,提高了系统的切换频率,从而有效的消除了抖动现象。在UPS逆变器设计中采用离散滑模控制,可以提高UPS的可靠性和可利用性,满足现代UPS系统较高的性能要求。[2][3]
2 UPS系统构成
UPS系统主要由整流器,蓄电池组和逆变器组成。其中UPS的逆变器主电路采用全桥逆变电路,并带有L-C滤波器,通过控制逆变器输出和负载间的静态开关,使市电停电时,蓄电池组和逆变器能持续为负载供电。系统简化原理图如图1所示。
为了提高系统的切换频率,消除抖动现象,UPS的核心控制器件选用TI公司的DSP TMS320LF2407,其指令周期为33ns,带有模数转换,串行外设接口,串行通信接口模块,事件管理器等的外围模块,16位定点内核和指令集,其指令集源码向上兼容TMS320C5x系列,具有良好的可移植性,其内核的高性能运算能力,使其能够运行复杂的控制算法,提高了控制器的灵活性和逻辑判断能力,从而使系统性能更为优越。[4]
在逆变器及其输出滤波电路中,电感电流
其中
在实际应用中,UPS必须拥有优良的性能,如抗干扰,电压波形失真较小,良好的跟踪性能,能够在非线形负载或者过流的情况下正常工作。本文即为满足UPS逆变器这些要求而设计一个具有双环结构的离散滑模控制器。
[p] 3 逆变器控制设计
逆变器采取双环结构设计,由电流预测器和电流控制器组成,且两者分别设计各自的切换平面,均采用自由顺序控制方法。电流预测器应具有比电流控制器更快的响应且对负载变化不敏感。电流控制器将具有单边行为特性以有效的消除了以前采用连续滑模控制时出现的抖动现象。电流预测器通过跟踪输出电压的误差估计出所需的电感电流,电流控制器则用来调节电感电流并产生PWM逆变器的控制信号。这样,逆变器将具有限流和固定切换频率的特性。其控制系统方框图如图2所示。
3.1 电流预测器设计
为了消除输出电压的静态误差,在系统滑模平面设计中,加入误差积分项
其中
与(2)联立后,设采样周期为T,可得到离散系统方程
其中
电流预测器控制项为
得到控制项。
3.2 电流控制器设计
将(1)离散化,其中采样周期为T,可得
系统的滑模函数可选为
其中
则电流控制器控制项为
滑模运动存在性证明与上文相似,并可得到满足条件0r>1,则系统可在无抖动情况下达到滑模平面。并可得其控制项为
[p] 4 仿真结果
现设计一1KVA的单相逆变器,其参数如下:
采用TI提供的TMS320LF2407评估板以及第三方公司专门为TI的2000系列DSP设计的仿真软件VisSim/ECD,可进行相应算法的在线仿真并生成相应的目标文件C语言源代码。仿真后,得到系统在一次投入和卸掉满载时的电压电流波形如图3所示,结果表明,控制器在负载变化情况下,显示出良好的鲁棒性,并在短时间内恢复正常,在稳态运行中具有良好的跟踪性能,满载情况下,电压维持在99%以上。另外,在非线形负载情况下,控制器也表现出良好的电压调节性能。
5 结论
本文提出了一种应用于UPS逆变器设计的离散滑模控制算法,设计采用双环结构,并具有限流和固定切换频率的特点,达到了消除抖动的目的。仿真结果表明系统能够有效的抑制输出电压波形失真,具有良好的电压调节性能以及带载能力强等特点。
参考文献
[1] 高为炳 变结构控制的理论及设计方法[M].北京:科学出版社.1996
[2] 田宏奇 滑模控制理论及其应用[M].武汉:武汉出版社.1995
[3] 李成章 现代UPS电源及电路图集[M].北京:电子工业出版社.2001
[4] Texas Instruments Inc.TMS320CLF240xA DSP Controllers Reference Guide[Z].
Texas Instruments Inc., 2001
[5] Tzuen-Lih Chern et al. Microprocessor-Based Modified Discrete Internal Variable-Structure Control for UPS[J].
IEEE Trans Ind.Electron,1999,46(2):341-347
[6] 胡庆等 滑模变结构控制在DC-DC变换器中的应用[J].沈阳工业大学学报,2002,24(2):57-60
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:L6598脱线控制器用于谐振式变换器
下一篇:齐纳电压检测器电路
射频和天线工程师培训课程详情>>
