- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
闭环反馈控制功率电子变换系统不稳定性抑制技术
录入:edatop.com 点击:
1、 引言
四种功率电子变换器AC/AC、AC/DC、DC/DC、DC/AC通常都含有LC输出滤波器。闭环反馈控制功率电子变换系统容易发生不稳定现象,因此,不稳定性抑制技术就成了电力电子学重要的研究课题。
LC输出滤波器是个二阶系统,一般把它的前端电压作为控制量,其频谱特性与变换器的控制策略及负载性质有关,输出滤波器的作用就是滤除其中的高次谐波,以得到所需电压波形。
闭环反馈控制功率电子变换系统的行为包括稳态响应和瞬态响应。为了使这两类响应达到系统的要求,常引入补偿装置来改善系统的性能。本文在分析研究了功率电子变换系统多种不稳定性抑制技术的基础上,提出并研究了一种具有抑制振荡功能的可控阻尼LC输出滤波器,仿真及试验结果均证实了其可行性。
2、 补偿网络技术
2.1传统的补偿网络技术
功率电子变换系统一般采用高增益的运算放大器形成误差放大器,并设计成反馈补偿网络,使系统形成闭环回路。常用的误差放大器补偿网络,见图1所示。图1a中输出、输入电压之间的传递函数为

其伯德图的转折频率 。在实际的设计应用中,转折频率正常地会被预定,然后根据上式计算出电阻和电容值。图1a中是一有源滞后-超前补偿网络。对应一个正弦输入,其输出是带有相移的正弦量,输出量的相移是输入信号频率的函数,当输入信号频率从零增加到无穷大时,输出量的相角从滞后变到超前。其超前补偿能使被补偿系统的频带和相位裕量增加,从而改善了系统的响应速度,并且减少了超调量;其滞后补偿能使系统的的稳定性获得改善[1-2]。
。在实际的设计应用中,转折频率正常地会被预定,然后根据上式计算出电阻和电容值。图1a中是一有源滞后-超前补偿网络。对应一个正弦输入,其输出是带有相移的正弦量,输出量的相移是输入信号频率的函数,当输入信号频率从零增加到无穷大时,输出量的相角从滞后变到超前。其超前补偿能使被补偿系统的频带和相位裕量增加,从而改善了系统的响应速度,并且减少了超调量;其滞后补偿能使系统的的稳定性获得改善[1-2]。

若只考虑改善系统的稳态精度,可只使用滞后补偿网络。功率电子变换系统中常用的滞后补偿网络为比例-积分(PI)环节,见图1b,其输出、输入电压之间的传递函数为

2.2电流控制斜坡补偿技术
电流控制功率电子变换系统有瞬态响应速度快、内在限流能力、易并联等优点,但该电路在占空比D>0.5时容易出现次谐波振荡,使得系统不稳定[3-5]。
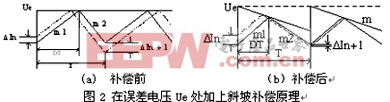
以一台20W 27VDC/±15VDC峰值电流型控制反激式DC/DC 变换器机内稳压电源为例[3]。不稳定原因分析见图2a,设△In为开关第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,

周期加大,造成系统不稳定或性能下降,形成次谐波振荡。消除这种振荡的方法是在变换器电流反馈信号或电流给定信号上,人为地增加一个斜坡函数进行斜坡补偿。
在电流给定信号(误差电压Ue)处加上斜坡补偿的原理如图2b所示。在Ue处加入斜坡补偿后,斜坡的斜率m等于或略大于m2/2 ,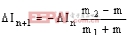 ,在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行。补偿斜坡可以由振荡器获得。
,在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行。补偿斜坡可以由振荡器获得。
原边电流反馈信号(采样电压Us)斜坡补偿原理,如图3a所示。这里将补偿斜坡加在采样电阻RS的电压上,再与平滑的误差电压Ue进行比较。这种补偿同样能有效地防止次谐波振荡现象,使电路工作稳定。图3b为采样电压Us补偿前后的试验波形。
3、 二阶LC输出滤波器降阶技术
3.1 电流断续导通DCM模式技术
反激式变换器根据电感电流的连续性可以分成电流断续模式(DCM)、电流连续模式(CCM)、电流临界连续模式三种工作模式。
在DCM模式时,反激式 DC/DC变换器各变量之间关系为[3~4]

式(3)中,UO为输出电压、Ui为输入电压、TS为变换器开关周期、D为开关的占空比、L为储能电感、I0为负载电流。由此可得到各变量之间的Laplace变换式为[4]

式(4)中,Cf为滤波电容、RL为负载电阻、 。
。
由(4)式得,输出电压UO对占空比D的传递函数为

同样根据文献[4]可获得,在电感电流连续模式(CCM)下,输出电压UO对占空比D的传递函数为

式(6)中,
由式(5)、(6)可知反激式DC/DC变换器分别工作在DCM和CCM模式下的零极点分布。CCM模式时,S右半平面有一零点,S左半平面有两个对称的极点;DCM模式时,无零点,S左半平面有一个极点。相比较,在DCM模式下,反激式DC/DC变换器属于一阶系统,S右半平面无零极点,由滤波器引起的系统不稳定性不复存在。因此,控制方案只需采用比例-积分(PI)的一阶串联补偿网络,系统的稳定范围大。另外通过对反激式DC/DC变换器的外特性进行分析,在DCM模式时,变换器存在很高的非线形内阻,具有类电流源特性。
3.2 电流控制两态(三态)调制技术
电流控制两态(三态)调制技术是电流控制技术中的一类,其闭环反馈控制系统由两个反馈环构成。外环是电压环,输出电压与基准电压信号进行比较,经过限幅放大,误差电压作为电流内环的给定;内环是电流环,电感电流作为反馈信号,误差电压是电流给定信号,两者比较产生自持振荡,形成两态(三态)调制器。由于电感电流与给定电流信号之间的约束关系,使得电感电流不再是独立变量。
当输入电压或负载变化引起输出电压变化时,都将引起电感电流变化率的改变,使功率开关的转换时刻变化,从而控制了功率开关的占空比。这对输入电压的变化而言,电流内环实质上起到了前馈控制作用,即输入电压变化尚未导致输出电压变化,就由电流内环产生调节作用。由于电流内环具有快速的响应,从分析整个系统的瞬态可看出,对于电压反馈外环,电流内环相当于一个受控放大器,外环的瞬态响应速度仅决定于滤波电容Cf和负载性质,所以整个系统具有快速的瞬态响应。对整个系统而言,LC滤波器对稳定性影响减小,二阶环节(LC)的输出滤波器降低为一阶环节(C)[3-6]。也就是说,整个系统除内环外,只有一个与滤波电容有关的比例积分环节和一个与负载有关的一阶或二阶环节,具有高度的稳定性。
[p] 4、新颖的输出滤波器可控阻尼抑制技术
4.1 可控阻尼LC输出滤波器
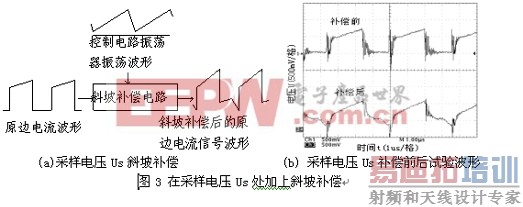
变换器常规输出滤波器等效电路如图4a所示,输出电压uO对滤波器前端电压uAB的传递函数为

其有效阻尼比 ,谐振峰值
,谐振峰值 。当负载电阻RL→∞时,
。当负载电阻RL→∞时, →0,同时谐振峰值MP→∞。对于二阶系统,MP表征系统的相对稳定性,如果MP的值在1.0MP1.4范围内,即相当于0.4
→0,同时谐振峰值MP→∞。对于二阶系统,MP表征系统的相对稳定性,如果MP的值在1.0MP1.4范围内,即相当于0.4 0.7的范围内,这时可以获得满意的瞬态性能。当MP>1.5时,阶跃响应将出现几次超调;一般来说,MP的值越大,相应的瞬态超调量便越大。当MP很大时,如果系统受到频率在谐振频率
0.7的范围内,这时可以获得满意的瞬态性能。当MP>1.5时,阶跃响应将出现几次超调;一般来说,MP的值越大,相应的瞬态超调量便越大。当MP很大时,如果系统受到频率在谐振频率 ,空载或轻载时和无阻尼自然谐振频率ωn很接近)附近的干扰信号作用,LC输出滤波器不能对其进行有效抑制和滤除,输出端便具有相对值较大甚至是放大的扰动分量,可能会造成严重后果[1]。
,空载或轻载时和无阻尼自然谐振频率ωn很接近)附近的干扰信号作用,LC输出滤波器不能对其进行有效抑制和滤除,输出端便具有相对值较大甚至是放大的扰动分量,可能会造成严重后果[1]。
从滤波器瞬态响应角度看,在空载或轻载时,若LC滤波器前端出现一扰动阶跃输入Ur,则滤波器输出端相应地出现多次振荡,该振荡叠加到输出电压上,引起输出电压误差较大。为简化分析,在此仅讨论空载时情况,由叠加原理可得其振荡电路如图4b所示,Rd包括了引线电阻与感容寄生电阻,其值非常小。由该扰动阶跃输入Ur在滤波器输出端引起的振荡电压分量为

式(8)中第一项就此次扰动而言是个定值,它所引起的电压误差量通过反馈控制系统很容易得到调节;因为Rd非常小,故(8)式第二项幅值衰减很慢。虽然控制系统的补偿网络可对其进行一定的调节作用,但由于其频率ω1和无阻尼自然谐振频率ωn很接近,若控制系统补偿网络的动态响应速度不是非常迅速时(如电压单闭环反馈系统),则此时系统的调节作用就比较有限,并且反容易受到该振荡分量的影响,引起uAB中出现频率与无阻尼自然谐振频率ωn相近的谐波分量,LC输出滤波器不能对其进行有效抑制和滤除,最后表现为输出电压基波上叠加有一扰动振荡谐波分量。
对此,可从两个方面解决问题。一者可以通过调整控制系统补偿网络或控制策略,提高其动态响应速度来解决。例如让功率电子变换系统工作在DCM模式、或采用电流控制调制技术,使得输出滤波器由二阶降为一阶。这样对整个系统而言,LC滤波器对稳定性影响减小,从而加大系统稳定性[3]。但电流断续DCM工作模式只适用于功率较小的场合;电流调制技术较复杂,并且受控制策略的限制。
二者可以在不改变系统整体结构(如控制策略、工作模式等)的情况下加大 ,从而加快(8)式中第二项幅值的衰减,对其进行有效抑制。加大 可通过增加Rd或减小Lf来实现。对于一定开关频率和基波频率的变换器系统,其滤波电感Lf 变动范围不大,若过多减小Lf,则会使得滤波效果变差。
可通过增加Rd或减小Lf来实现。对于一定开关频率和基波频率的变换器系统,其滤波电感Lf 变动范围不大,若过多减小Lf,则会使得滤波效果变差。
增加Rd有四种方法。一是在图4b Rd处串接一小电阻Rf(Rd与其相比很小可忽略不计),空载时其传递函数为

(9)式与(7)式空载时的传递函数相比,根轨迹的极点从虚轴向左半平面移动,增加了系统的稳定性;但这种方法在外接负载时流过小电阻Rf的电流很大,会产生过大的损耗。
第二种方法是在滤波电容Cf处并联一个较大的电阻RLS,经过计算推导,RLS折算成串联等效
 。以一台1KVA 270VDC/115V400HzAC航空静止变流器为例,开关频率FS=50KHz,Lf=1mH,Cf=4uF,欲获得1Ω的串联等效电阻R’d,需并联电阻RLS=250Ω,此时损耗为52.9W,显然这种方法不合理。同时这也解释了轻载时为什么也容易出现干扰谐波振荡而重载时易稳定。
。以一台1KVA 270VDC/115V400HzAC航空静止变流器为例,开关频率FS=50KHz,Lf=1mH,Cf=4uF,欲获得1Ω的串联等效电阻R’d,需并联电阻RLS=250Ω,此时损耗为52.9W,显然这种方法不合理。同时这也解释了轻载时为什么也容易出现干扰谐波振荡而重载时易稳定。
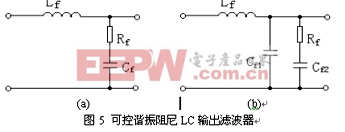
三是在Cf处串接一小电阻Rf,如图5a所示。这种方法避免了第一种方法在负载时损耗过大的缺点;在空载时第三种方法和第一种方法的电路结构虽然相同,但两者的传递函数并不一样,第三种方法的传递函数为

多了一个左半平面的零点,使得根轨迹向左移,增加了系统的稳定性,减小了系统响应的调整时间。但第三种方法会使输出电压中高频谐波滤除得不太干净,因为小电阻上有小部分高频谐波压降,另外在Cf较大时(结合基波频率时的容抗考虑)小电阻Rf上的损耗也不能忽视。
第四种方法是作者提出的可控谐振阻尼LC输出滤波器[7],如图5b所示。为了消除第三种方法的缺点,将Cf一分为二,其中一个电容串一小电阻Rf,Cf=Cf1+Cf2,Cf1会使输出电压中的高频谐波滤除干净,电阻Rf与Cf2相串可抑制振荡且使电阻损耗大为减小。Cf2值应尽可能取小以减小电阻Rd上的损耗,一般约为Cf的一半;电阻Rf一般取值几欧姆~几十欧姆左右,主要通过和Cf2的容抗比较而定,原则上Rf在远小于Cf2容抗的前提下尽可能取大但又必须保证其损耗要小,具体可通过计算、计算机仿真和试验综合确定。
[p] 4.2 仿真、试验结果与讨论
以一台1KVA 270VDC/115V400HzAC航空静止变流器为例,Lf=1mH,Cf=4uF,开关频率FS=50KHz,电压单闭环反馈控制,空载时传统无阻尼输出滤波器的输出电压仿真波形如图6a所示,uAB为滤波电感前端电压,uO为滤波器输出电压。可知滤波器的无阻尼自然振荡频率ωn=15811rad/s=2pfn=2p*2518,fn=2518Hz。图6a所示扰动谐波振荡频率约为400*15=6000Hz,约为2.4倍fn,这是因为闭环反馈控制环节的调节作用加快了扰动谐波的振荡频率。以一个无阻尼自然振荡周期Tn=1/fn时间内,式(8)中第二项幅值衰减到0.378倍(1/e)作为Rf的大致计算标准。则有公式 ,算得Rf=5.038Ω;再经过计算机仿真,实际取值Rf=4Ω,Cf1=2uF,Cf2=2uF,采用可控谐振阻尼LC输出滤波器的空载仿真波形如图6b所示,Rf的损耗约为1.32W。
,算得Rf=5.038Ω;再经过计算机仿真,实际取值Rf=4Ω,Cf1=2uF,Cf2=2uF,采用可控谐振阻尼LC输出滤波器的空载仿真波形如图6b所示,Rf的损耗约为1.32W。
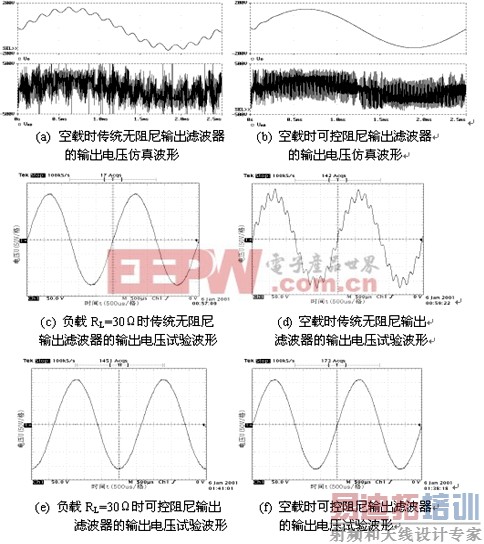
图6 两种输出滤波器的输出电压仿真和试验波形
从仿真波形可看出,空载时可控谐振阻尼LC输出滤波器具有很好的振荡抑制作用,使得输出电压波形质量高。图6c~f为相应的原理试验波形,可见负载时传统无阻尼输出滤波器的输出电压波形稳定光滑(图6c),而空载时传统无阻尼输出滤波器的输出电压波形存在扰动谐波振荡(图6d);从图6d中可知扰动谐波振荡频率约为400*13=5200Hz,约为2.1倍fn,比仿真值略小。在采用可控谐振阻尼LC输出滤波器后,空载或负载时输出电压波形都变得稳定光滑(图6e、f)。原理试验波形与仿真波形一致,证实了理论分析及仿真结果正确。
5、 结论
(1)、有源超前补偿能改善系统的响应速度;有源滞后补偿能使系统的稳定性提高。功率电子变换系统中常用的滞后补偿网络为比例-积分(PI)环节。对于次谐波振荡,可采用斜坡补偿的方法进行消除。
(2)、采用电流断续导通DCM模式技术和电流控制两态(三态)调制技术可使LC输出滤波器由二阶系统降为一阶系统,从而使得系统变得高度稳定。
(3)、在空载或轻载场合,变换器的输出易出现扰动谐波振荡,对此本文提出的可控阻尼输出滤波器能够有效进行抑制。该可控阻尼输出滤波器具有电路结构简洁、易实现、振荡抑制效果明显、损耗低等优点。
参考文献
1. 李治.机车自动控制原理.北京:中国铁道出版社,1987.
2. 梁适安.转换式电源供给器原理与设计.香港:全华科技图书股份有限公司,1990.
3. 陈道炼.高频环节航空静止变流器研究.南京航空航天大学博士后研究工作报告,2001.
4. 张立,赵永健.现代电力电子技术.北京:科学出版社,1992.
5. 蔡宣三,龚绍文.高频功率电子学.北京:科学出版社,1993.
6. 丁道宏.电力电子技术. 北京:航空工业出版社,1992.
7. 张友军.新颖的可控阻尼LC输出滤波器.电力电子技术,2002,36(3):50~52.
四种功率电子变换器AC/AC、AC/DC、DC/DC、DC/AC通常都含有LC输出滤波器。闭环反馈控制功率电子变换系统容易发生不稳定现象,因此,不稳定性抑制技术就成了电力电子学重要的研究课题。
LC输出滤波器是个二阶系统,一般把它的前端电压作为控制量,其频谱特性与变换器的控制策略及负载性质有关,输出滤波器的作用就是滤除其中的高次谐波,以得到所需电压波形。
闭环反馈控制功率电子变换系统的行为包括稳态响应和瞬态响应。为了使这两类响应达到系统的要求,常引入补偿装置来改善系统的性能。本文在分析研究了功率电子变换系统多种不稳定性抑制技术的基础上,提出并研究了一种具有抑制振荡功能的可控阻尼LC输出滤波器,仿真及试验结果均证实了其可行性。
2、 补偿网络技术
2.1传统的补偿网络技术
功率电子变换系统一般采用高增益的运算放大器形成误差放大器,并设计成反馈补偿网络,使系统形成闭环回路。常用的误差放大器补偿网络,见图1所示。图1a中输出、输入电压之间的传递函数为
其伯德图的转折频率
若只考虑改善系统的稳态精度,可只使用滞后补偿网络。功率电子变换系统中常用的滞后补偿网络为比例-积分(PI)环节,见图1b,其输出、输入电压之间的传递函数为
2.2电流控制斜坡补偿技术
电流控制功率电子变换系统有瞬态响应速度快、内在限流能力、易并联等优点,但该电路在占空比D>0.5时容易出现次谐波振荡,使得系统不稳定[3-5]。
以一台20W 27VDC/±15VDC峰值电流型控制反激式DC/DC 变换器机内稳压电源为例[3]。不稳定原因分析见图2a,设△In为开关第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,
周期加大,造成系统不稳定或性能下降,形成次谐波振荡。消除这种振荡的方法是在变换器电流反馈信号或电流给定信号上,人为地增加一个斜坡函数进行斜坡补偿。
在电流给定信号(误差电压Ue)处加上斜坡补偿的原理如图2b所示。在Ue处加入斜坡补偿后,斜坡的斜率m等于或略大于m2/2 ,
原边电流反馈信号(采样电压Us)斜坡补偿原理,如图3a所示。这里将补偿斜坡加在采样电阻RS的电压上,再与平滑的误差电压Ue进行比较。这种补偿同样能有效地防止次谐波振荡现象,使电路工作稳定。图3b为采样电压Us补偿前后的试验波形。
3、 二阶LC输出滤波器降阶技术
3.1 电流断续导通DCM模式技术
反激式变换器根据电感电流的连续性可以分成电流断续模式(DCM)、电流连续模式(CCM)、电流临界连续模式三种工作模式。
在DCM模式时,反激式 DC/DC变换器各变量之间关系为[3~4]
式(3)中,UO为输出电压、Ui为输入电压、TS为变换器开关周期、D为开关的占空比、L为储能电感、I0为负载电流。由此可得到各变量之间的Laplace变换式为[4]
式(4)中,Cf为滤波电容、RL为负载电阻、
由(4)式得,输出电压UO对占空比D的传递函数为
同样根据文献[4]可获得,在电感电流连续模式(CCM)下,输出电压UO对占空比D的传递函数为
式(6)中,
由式(5)、(6)可知反激式DC/DC变换器分别工作在DCM和CCM模式下的零极点分布。CCM模式时,S右半平面有一零点,S左半平面有两个对称的极点;DCM模式时,无零点,S左半平面有一个极点。相比较,在DCM模式下,反激式DC/DC变换器属于一阶系统,S右半平面无零极点,由滤波器引起的系统不稳定性不复存在。因此,控制方案只需采用比例-积分(PI)的一阶串联补偿网络,系统的稳定范围大。另外通过对反激式DC/DC变换器的外特性进行分析,在DCM模式时,变换器存在很高的非线形内阻,具有类电流源特性。
3.2 电流控制两态(三态)调制技术
电流控制两态(三态)调制技术是电流控制技术中的一类,其闭环反馈控制系统由两个反馈环构成。外环是电压环,输出电压与基准电压信号进行比较,经过限幅放大,误差电压作为电流内环的给定;内环是电流环,电感电流作为反馈信号,误差电压是电流给定信号,两者比较产生自持振荡,形成两态(三态)调制器。由于电感电流与给定电流信号之间的约束关系,使得电感电流不再是独立变量。
当输入电压或负载变化引起输出电压变化时,都将引起电感电流变化率的改变,使功率开关的转换时刻变化,从而控制了功率开关的占空比。这对输入电压的变化而言,电流内环实质上起到了前馈控制作用,即输入电压变化尚未导致输出电压变化,就由电流内环产生调节作用。由于电流内环具有快速的响应,从分析整个系统的瞬态可看出,对于电压反馈外环,电流内环相当于一个受控放大器,外环的瞬态响应速度仅决定于滤波电容Cf和负载性质,所以整个系统具有快速的瞬态响应。对整个系统而言,LC滤波器对稳定性影响减小,二阶环节(LC)的输出滤波器降低为一阶环节(C)[3-6]。也就是说,整个系统除内环外,只有一个与滤波电容有关的比例积分环节和一个与负载有关的一阶或二阶环节,具有高度的稳定性。
[p] 4、新颖的输出滤波器可控阻尼抑制技术
4.1 可控阻尼LC输出滤波器
变换器常规输出滤波器等效电路如图4a所示,输出电压uO对滤波器前端电压uAB的传递函数为
其有效阻尼比
从滤波器瞬态响应角度看,在空载或轻载时,若LC滤波器前端出现一扰动阶跃输入Ur,则滤波器输出端相应地出现多次振荡,该振荡叠加到输出电压上,引起输出电压误差较大。为简化分析,在此仅讨论空载时情况,由叠加原理可得其振荡电路如图4b所示,Rd包括了引线电阻与感容寄生电阻,其值非常小。由该扰动阶跃输入Ur在滤波器输出端引起的振荡电压分量为
式(8)中第一项就此次扰动而言是个定值,它所引起的电压误差量通过反馈控制系统很容易得到调节;因为Rd非常小,故(8)式第二项幅值衰减很慢。虽然控制系统的补偿网络可对其进行一定的调节作用,但由于其频率ω1和无阻尼自然谐振频率ωn很接近,若控制系统补偿网络的动态响应速度不是非常迅速时(如电压单闭环反馈系统),则此时系统的调节作用就比较有限,并且反容易受到该振荡分量的影响,引起uAB中出现频率与无阻尼自然谐振频率ωn相近的谐波分量,LC输出滤波器不能对其进行有效抑制和滤除,最后表现为输出电压基波上叠加有一扰动振荡谐波分量。
对此,可从两个方面解决问题。一者可以通过调整控制系统补偿网络或控制策略,提高其动态响应速度来解决。例如让功率电子变换系统工作在DCM模式、或采用电流控制调制技术,使得输出滤波器由二阶降为一阶。这样对整个系统而言,LC滤波器对稳定性影响减小,从而加大系统稳定性[3]。但电流断续DCM工作模式只适用于功率较小的场合;电流调制技术较复杂,并且受控制策略的限制。
二者可以在不改变系统整体结构(如控制策略、工作模式等)的情况下加大 ,从而加快(8)式中第二项幅值的衰减,对其进行有效抑制。加大
增加Rd有四种方法。一是在图4b Rd处串接一小电阻Rf(Rd与其相比很小可忽略不计),空载时其传递函数为
(9)式与(7)式空载时的传递函数相比,根轨迹的极点从虚轴向左半平面移动,增加了系统的稳定性;但这种方法在外接负载时流过小电阻Rf的电流很大,会产生过大的损耗。
第二种方法是在滤波电容Cf处并联一个较大的电阻RLS,经过计算推导,RLS折算成串联等效
三是在Cf处串接一小电阻Rf,如图5a所示。这种方法避免了第一种方法在负载时损耗过大的缺点;在空载时第三种方法和第一种方法的电路结构虽然相同,但两者的传递函数并不一样,第三种方法的传递函数为
多了一个左半平面的零点,使得根轨迹向左移,增加了系统的稳定性,减小了系统响应的调整时间。但第三种方法会使输出电压中高频谐波滤除得不太干净,因为小电阻上有小部分高频谐波压降,另外在Cf较大时(结合基波频率时的容抗考虑)小电阻Rf上的损耗也不能忽视。
第四种方法是作者提出的可控谐振阻尼LC输出滤波器[7],如图5b所示。为了消除第三种方法的缺点,将Cf一分为二,其中一个电容串一小电阻Rf,Cf=Cf1+Cf2,Cf1会使输出电压中的高频谐波滤除干净,电阻Rf与Cf2相串可抑制振荡且使电阻损耗大为减小。Cf2值应尽可能取小以减小电阻Rd上的损耗,一般约为Cf的一半;电阻Rf一般取值几欧姆~几十欧姆左右,主要通过和Cf2的容抗比较而定,原则上Rf在远小于Cf2容抗的前提下尽可能取大但又必须保证其损耗要小,具体可通过计算、计算机仿真和试验综合确定。
[p] 4.2 仿真、试验结果与讨论
以一台1KVA 270VDC/115V400HzAC航空静止变流器为例,Lf=1mH,Cf=4uF,开关频率FS=50KHz,电压单闭环反馈控制,空载时传统无阻尼输出滤波器的输出电压仿真波形如图6a所示,uAB为滤波电感前端电压,uO为滤波器输出电压。可知滤波器的无阻尼自然振荡频率ωn=15811rad/s=2pfn=2p*2518,fn=2518Hz。图6a所示扰动谐波振荡频率约为400*15=6000Hz,约为2.4倍fn,这是因为闭环反馈控制环节的调节作用加快了扰动谐波的振荡频率。以一个无阻尼自然振荡周期Tn=1/fn时间内,式(8)中第二项幅值衰减到0.378倍(1/e)作为Rf的大致计算标准。则有公式
从仿真波形可看出,空载时可控谐振阻尼LC输出滤波器具有很好的振荡抑制作用,使得输出电压波形质量高。图6c~f为相应的原理试验波形,可见负载时传统无阻尼输出滤波器的输出电压波形稳定光滑(图6c),而空载时传统无阻尼输出滤波器的输出电压波形存在扰动谐波振荡(图6d);从图6d中可知扰动谐波振荡频率约为400*13=5200Hz,约为2.1倍fn,比仿真值略小。在采用可控谐振阻尼LC输出滤波器后,空载或负载时输出电压波形都变得稳定光滑(图6e、f)。原理试验波形与仿真波形一致,证实了理论分析及仿真结果正确。
5、 结论
(1)、有源超前补偿能改善系统的响应速度;有源滞后补偿能使系统的稳定性提高。功率电子变换系统中常用的滞后补偿网络为比例-积分(PI)环节。对于次谐波振荡,可采用斜坡补偿的方法进行消除。
(2)、采用电流断续导通DCM模式技术和电流控制两态(三态)调制技术可使LC输出滤波器由二阶系统降为一阶系统,从而使得系统变得高度稳定。
(3)、在空载或轻载场合,变换器的输出易出现扰动谐波振荡,对此本文提出的可控阻尼输出滤波器能够有效进行抑制。该可控阻尼输出滤波器具有电路结构简洁、易实现、振荡抑制效果明显、损耗低等优点。
参考文献
1. 李治.机车自动控制原理.北京:中国铁道出版社,1987.
2. 梁适安.转换式电源供给器原理与设计.香港:全华科技图书股份有限公司,1990.
3. 陈道炼.高频环节航空静止变流器研究.南京航空航天大学博士后研究工作报告,2001.
4. 张立,赵永健.现代电力电子技术.北京:科学出版社,1992.
5. 蔡宣三,龚绍文.高频功率电子学.北京:科学出版社,1993.
6. 丁道宏.电力电子技术. 北京:航空工业出版社,1992.
7. 张友军.新颖的可控阻尼LC输出滤波器.电力电子技术,2002,36(3):50~52.
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:高压电压源与电流源变频器性能对比的讨论
下一篇:聚光太阳能转换效率创新纪录
射频和天线工程师培训课程详情>>
