- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
数字控制级联式双向DC-DC变换器的研究
录入:edatop.com 点击:
1引言
双向DC-DC变换器具有双向能量流动的能力, 是典型的“一机两用”设备,目前研究的几种BDC 拓扑存在下面的几个缺陷:(1)隔离型Buck/Boost BDC 因含有的隔离型Boost 变换器,存在开关管电压尖峰大的问题,难以抑制;(2)移相式BDC 通过变压器漏感(或少量串联电感)传递能量,存在环流能量大的问题,不适于宽调压范围应用;(3)反激式BDC 采用耦合电感传输能量,限制了传输功率等级;(4)Cuk 型BDC 和Sepic/Zeta型BDC 由于其电路拓扑比较复杂,且能量传输过程环节较多,实际应用较少。
近年来, 随着DSP等数字处理器芯片的快速发展,相对于模拟控制而言,数字控制的优点越来越突出。数字化处理和控制,可避免模拟信号传递的畸变、失真,减少杂散信号的干扰;用软件形式的数值计算实现模拟硬件电路的功能,因此控制电路的硬件结构可以简化,外围器件数目可以减少;数字电源基本不受元件性能变化的影响,电源一致性好,可靠性高.
因此,基于上述内容,本文提出了构建于LF2407型DSP控制的硬件平台之上的由Buck/Boost 电路和双向半桥直流变换器构成的级联式双向DC-DC变换器,它具有的优点是:(a)两部分可分别优化设计;(b)功率密度高;(c)两部分变比的倍乘关系,适用于大变比变换的应用场合; (d)简化系统硬件设计、减少了元件数量、改善了系统可靠性。同时,本文研究了一种适用于Boost变换器的无源软开关电路,利用谐振实现开关管的ZVS。
2双向DC-DC变换器基本结构及工作原理
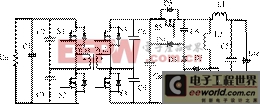
图 1 级联式双向DC-DC变换器主电路
由图1可以看出,前级采用双向半桥DCT,后级采用不隔离Buck/Boost BDC。在Buck/Boost电路中增加了无源软开关电路. 升压模式下的工作过程分为9个模式. 其中电源为Uin,L1为储能电感,续流二极管D5,滤波电容Cm构成了Boost变换器的主电路.电感L2,二极管D2,D3,D4, 电容C6,C7组成辅助电路.通过谐振电感L2实现S6的零电流开通,谐振电容C7可以实现S6的零电压关断.由于滤波电感L1和输出滤波电容Cm相对于谐振电感和电容大许多,并且软开关电路的工作过程很短,因此假定在辅助电路工作时,流过L1的电流和输出电压Vo保持恒定.
模态1 模态2
模态3 模态4
模态5 模态6
模态7 模态8
模态9
图 2 升压模式下后级工作模态
模态1(t1tt2) t1时刻前,开关管S6处于关断,储存于L1中的能量通过S5的反并二极管D5传送到负载.当S6在t1时刻开通后,流过D5中的电流线形减小,同时电感L2中的电流从零开始增大.
模态2(t2tt3)当流过D5中的电流降到0以后,D3开始导通.L2和C6,C7开始谐振,C7中的能量通过C7-C6-L2-S6回路释放.结果,L2中的电流包含了流经L1中的电流和谐振电流.当谐振过程完成后,储存在C7中的能量转移至C6,C6的电压上升到输出电压Vo.
模态3(t3tt4)当C7的电压降至0以后,二极管D2导通,因此L2和C6通过D2和D3开始谐振.随着L2中的电流的不断减小,C6的电压继续升高.
模态4(t4tt5)当L2中的电流和L1中的电流相同时,开关管导通过程完成,C6和C7的电压保持定值.此时,变换器工作状态和传统的boost电路一样.
模态5(t5tt6) 当开关管S6在t5时刻关断,流经主功率管的电流完全转移到C7和D2上.直至C7中的电压增至输出电压Vo.
模态6(t6tt7) D4在t6时刻导通,电容C6通过D4放电.
模态7(t7tt8)当C7中的电压上升至输出电压Vo时,D3在t7时刻导通.流经L2中的电流通过D3和D4传至负载.从而,L2中的电流继续减小.
模态8(t8tt9)当L2中的电流减小到0以后, L2中将不再有电流通过直到S6再次导通.
模态9(t9tt10) 当C6中的电压在t8时刻降至0以后,另一个开关模态开始.反并二极管D5导通.
图 3 升压模式下关键波形
升压模式工作(能量从Uin侧流向Uo侧)时,电感电流平均值为正.双向半桥直流变换器中S1、S2、S3和S4相同固定占空比,且S1、S3和S2、S4互补导通。通过对S6的可控调节,从而实现升压模式下的稳压输出。
降压模式工作(能量从Uo侧流向Uin侧)时,电感电流平均值为负,与升压模式时类似。S1、S2、S3和S4的驱动信号不变,封锁S6的脉冲信号,受控开关为S5。
3双向DC-DC变换器的数字实现
图4 DC-DC变换器数字控制系统流程
图4为双向变换器数字控制系统的流程图,经过AD转换得到的电压电流数字信号被送至数字信号处理器进行PI调节。DPWM把控制信息转化为PWM脉宽信号,通过对占空比的调节从而得到理想的输出电压和电流。
由于TMS320LF2407内部带有ADC模块,因此,输出电压值通过电压LEM采样反馈给DSP的ADC模块,在AD中断程序里读取采样值,然后进行数字PI调节,使输出稳压。
为了实现Boost和Buck模式的自由切换,必须对副边电压进行采样。当电压高于特定值时,通过对Buck/Boost级开关管的控制实现变换器的反向运行,从而给原边的蓄电池进行恒流充电。为了使电池容量恢复到100%,必须允许一定的过充电,过充电反应发生后,电池的电压迅速上升,达到一定数值后,上升速率减小,然后电池电压开始缓慢下降。此时为了维持电池容量,须将均充改为浮充,即对蓄电池进行恒压充电,因此同样要对蓄电池的电压进行采样.
数字PI调节采用的是增量式PI控制,离散后的数字PI算法表达式为:
(a)
:比例系数; :积分系数; :本次误差; :本次控制量输出
依此类推:
(b)
(a)-(b)得到增量式数字PI控制算法表达式如下:
(c)
式(c)中的 即为数字调节器输出控制量的增量。
所以,最终输出的控制量为:
(d)
主程序流程图和ADC的中断服务程序流程图分别如图5和图6所示。
图 5主程序流程图
图6 ADC的中断服务程序流程图
4实验结果
根据上述主电路工作原理分析,为证实数字化控制方法的可行性,研制了一台实验样机,开关频率为100kHz,所选用元器件参数如下:S1,S2 选用IRF460,S3,S4,S5和S6为IRFP150N。Uin为2节蓄电池串连(单个12V,50A·h/10h);C1为470uF,C2,C3为220uF,C4,C5为2200uF,C6为500nF,C7w为10nF,Cm为100uF,Cf100uF,L1为86uH,L2为6uH.Dsp芯片用TMS320LF2407A,电压采样LEM为VSM025A,原边额定电流1OmA,副边对应电流25mA;电流采样LEMCSM025LA,原边额定电流25A,副边对应电流25mA。
图7 S6导通时的电压电流波形
图8 S6关断时的电压电流波形
图9 S3,S4的gs和ds波形
图10 S1,S2的gs和ds波形
图11 恒流充电时电感电流采样电阻电压
5结论
本文通过对级联式双向DC-DC变换器原理的分析,并在数字控制的硬件基础之上,实验和验证了文中所提到的控制方案的可行性和有效性。该方案简化了硬件电路,通过软件实现了电路的稳压输出和对蓄电池的恒流恒压充电。
参考文献
[1] Xuezhi WU, Xinmin JIN, Lipei HUANG and Guang FENG.A Lossless Snubber for DC-DC Converters and its Application in PFC[J].Proceedings of IPEMC 2000, Vo1.3, pp.11441 149. 2000
[2] Dan M.Sable, Fred C. Lee and Bo H. Cho. A zero-voltage-switching Bidirectional battery chager/discharger for the NASA EOS satellite [J] . Proc. of APEC’92, pp.614-621.
[3] K.Mark Smith ,Jn. Keyue Ma Smedley. Properties and synthesis of passive lossless soft-switching PWM converters [J] . IEEE Trans. on Power Electron ,14(5) :890 - 899.
[4] 张方华,双向DC-DC变换器的研究,南京航空航天大学工学博士学位论文,2004.6
[5] 严仰光,双向直流变换器[M],江苏:科学技术出版社,2004.6.
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
