- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基站电源中同步电路的设计方法
录入:edatop.com 点击:
1 引言
在通信电源中,有多路输出的电路常需要将各个输出信号同步,以满足控制的要求。
将电源的各控制芯片同步到系统时钟,也可以减小噪声,改善电源的性能。
另外,在多功率等级的电源中也需要同步,以避免各部分分别开通时产生的离散噪声。各部分同时开通就能同时产生共模噪声,这样就简化了尖峰功率的估算,还能估计到功率分布和损耗的情况,并能根据损耗做母线的电压补偿。
所以,同步电路的设计是电源电路中一个不可忽视的重要环节。
2 同步电路的拓扑形式
芯片可以通过RT/CT端直接连接外部时钟源来同步。芯片内部比较器的高低两个门限决定时间电容 C T的充放电过程,当 C T开始其充电周期,PWM处于开通的状态,时间电容持续充电直到内部比较器的上限。一旦给出同步信号,放电电路激活,时间电容持续放电直到内部比较器的下限。在放电时PWM比较器无输出,这样PWM处于关断的状态。
外部同步电平的高、低状态可以用数字量1或0来代表。芯片的同步端既可以作为同步信号输入端,也可以作为同步信号输出端。当没有同步端时,时间电路( C T)也可以由数字逻辑(0,5V)工作模式来取代模拟的工作模式。当用数字量来表示电平后,“开通时间”,“关断时间”,“占空比”和“频率”都可以用数字脉冲来表示。如同步信号的逻辑低时间决定了PWM的开通时间,同步信号的逻辑高时间决定了PWM的关断时间。频率,占空比或死区时间可以由PWM时间电容端( C T)的同步信号准确控制。同步信号的高或低可以由555定时器或微处理器来决定。
如果PWM芯片没有连到内部晶振的同步输入、输出端,这时从晶振必须不工作。当从模块使用不同的PWM芯片并具有不同的同步特性如反向的同步信号,这时也必须使从晶振不工作。
但是,这种直接用数字信号同步的工作方法有许多缺点。首先,在电压模式控制时,PWM误差放大器对脉宽没有控制。因为,PWM误差放大器的输出是和一个数字信号相比较,而不是和一个锯齿波信号相比较。从而,通过钳位误差放大器的输出来控制占空比的软启动功能也将无效。这是因为,本身没有时间坡度,电源输出完全由同步脉冲源来控制。只要同步脉冲锁定,PWM输出将根据同步脉冲的电平总是保持完全开或者完全关。当然,没有自身的CT坡度电源将没有自启动,在同步脉冲出现前将总是保持关。电流模式的坡度补偿需要外接其他元器件来实现。每个模块必须设定为主模块或从模块,并且不能随意改变。为了克服这个缺点我们采用一种比较通用的同步方式如图1所示。
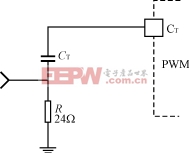
图1 同步方式
这种同步方法是时间电容 C T不直接接地,而是串一个约24Ω的电阻到地,输入同步信号叠加到电阻端电压上(电阻端电压通常为0.5V,这是为了设定一个小的偏置,并且可以影响模块的初始频率),使 C T上的电压高于晶振内部门限电压。在同步脉冲出现前,PWM工作在自身的 R T, C T设定的频率上。同步信号出现后,同步数字信号叠加到原来的模拟波形上,这种同步方式的RT/CT输入端是模拟和数字信号的叠加,如图2所示。

图2 同步波形
工作时,同步脉冲使 C T上的电压迅速高于PWM比较器的上限,晶振的充电状况迅速翻转,晶振开始与同步信号同步的放电周期。
图1所示方法具有如下优点:可以从任何的PWM芯片取得同步信号或者同步任何PWM芯片,且芯片的数量不限,双向的同步信号,对于简单的系统可以用数字信号同步, C T上的坡度可以做斜坡补偿,每个模块没有严格的频率设定,而且可以远端关断。
增加同步电路将对PWM的占空比,死区时间和坡度产生较小的影响。
3 同步电路参数计算
首先,我们必须选定晶振的时间部分参数以保证同步。同步时锯齿波的幅度要比电压上限低,否则,在同步脉冲来之前比较器就动作了,这将使同步脉冲失效。为了可靠工作,应该使PWM晶振的工作频率比同步频率低。通常低10%。如图3所示。
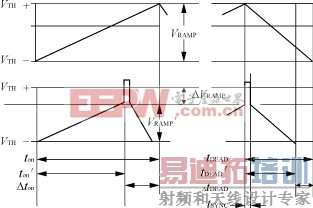
图3 同步时间参数 [p]
3.1 时间坡度
时间坡度的幅度也需要比比较器的上限幅度低10%,最小的同步脉冲幅度必须补足这个10%的幅度-幅度差,如果稍大则更加可靠。
减小这个幅度-幅度差,充电和放电幅度都会减小,这将使CT的放电时间减小,从而使死区时间减小。同步脉冲的宽度越宽,芯片的死区时间越长,所以,同步脉冲的宽度只要足够宽能被芯片的比较器检测到就可以了。
3.2 晶振坡度方程
根据手册,时间元件 C T和 R T可以用来设定频率和死区时间。为了取得更好的应用效果,必须很好地分析附加的同步电路对时间电路的影响。
3.2.1 晶振充电坡度方程
Δ
V
OSC=![]()
I charge= V charge/ R T
t charge=Δ V OSC C T/ I charge′
Δ V OSC= V thupper- V thlower
Δ
V
OSC′=Δ
V
OSC![]() -
V
24Ω
-
V
24Ω
V 24Ω=24 I charge=24 V charge/ R T
如果死区时间相对整个周期很小,那么以上这些计算公式也可以简化。这时改变坡度电压的效果在于减小 C T的充电时间( t charge),从而使晶振的充电时间同步到更高的频率。新的充电时间( t charge′)是原来的充电时间乘以原频率和同步频率的比值,新旧充电时间的比值 P 为
P
=![]() =
=![]() =
=![]()
当充电电流小或者 R T大时,24Ω电阻上的电压可以忽略。 C T上的电压峰峰值为2V时,2mA的电流将产生2.5%的时间误差。最好使IC的晶振频率比同步频率低15%,也就是说 P =0.85,这时
Δ V OSC(sync)′=Δ V OSC(orig) P =0.85Δ V OSC(orig)
t chg(sync)′= t chg(orig) P =0.85 t chg(orig)
V (sync)的最小幅度为0.15Δ V OSC(orig)
晶振峰—峰电压为2V时,最小的同步脉冲幅度为0.3V,宽度为脉冲周期的15%。
3.2.2 晶振放电坡度方程
正确的死区时间控制是很重要的,增加同步电路后减小了时间电容 C T的放电时间,也就减小了PWM的死区时间。这样一来,首先 C T上的电压峰值坡度减小了Δ V OSC(orig)-Δ V OSC(sync),这就使时间电容从一个比较小的电能开始放电。其次,根据电流的大小,24Ω电阻上产生了一个偏置电压。典型的IC放电电流从6mA到12mA。在充电时,因为充电电流只有1mA到2mA,所以,在24Ω电阻上的偏置电压可以忽略,而放电电流是充电电流的近十倍,所以,在24Ω电阻上的偏置电压不可以忽略,即在计算死区时间时必须考虑24Ω电阻上的偏置电压。
只要知道芯片的放电电流,就可以计算死区时间。当然,比较方便的办法是使用手册里的 C T和死区时间对应表格,并加上同步电路的影响。简言之,放电电流是8mA。
Δ V dschg′=Δ V dschg(orig) P - V 24Ω=0.85Δ V OSC(orig)-0.2
t
dchg′=
t
dchg(orig)-
t
24Ω=
t
dchg(orig)![]()
这里 t dchg(orig)是表中的死区时间。
实际的死区时间是 C T的不放电时间和同步脉宽之和。同步脉宽使PWM输出关闭,因此,必须计入死区时间。同步脉宽补偿了“失去”的死区时间,或者说是死区时间的延续。即
t dead′= t dchg′+ t syncpulsewidth [p]
4 实验结果
在设计的一个多输出的基站电源中,我们用到了以上设计思想和计算方法,取得了较好的效果。基站电源封闭在整个基站系统的机箱中,要求和系统时钟同步,并且由于是多输出系统,我们采用了两片控制芯片,也要求同步。该电源的具体参数如下:
输入 27V;
输出 ±12V,5A;±5V,10A;±3.3V,10A;
工作频率 100kHz;
负载调整率 ±0.1%;
电源调整率 ±0.05%。
我们使用了两组UC3806的芯片,两个芯片的PWM波形如图4所示。
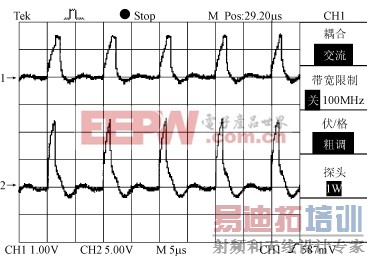
图4 两组芯片的开关波形
5 结语
本文分析了同步在多芯片应用,大系统,及多功率等级电路中的重要性,并分析了同步参数的计算方法,并依此设计了一台多输出的基站电源,取得了较好的实验结果。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:一种新型的调光电子镇流器
下一篇:减轻对电网冲击的高阻抗电弧炉
射频和天线工程师培训课程详情>>
