- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
寻北仪中力矩电流发生器的设计
录入:edatop.com 点击:
摘要:针对挠性陀螺寻北仪控制力矩产生的需要,设计了力矩电流发生器。控制计算机解算得到的控制电流所对应的控制电压通过ADT800输出给压控恒流源,通过软件控制开关电路实现控制电流的精粗和极性转换,解决了系统对大范围、高精度控制电流的需求。实验测试表明,该电路工作稳定,能满足系统性能要求,可推广应用到其他惯性导航系统中。
关键词:寻北仪;挠性陀螺仪;力矩器;恒流源;开关电路
O 引言
寻北仪在军事和民用领域都有着广泛应用,它可测出载体纵轴与真北的夹角,用于为车辆、船舶等载体提供方位基准。力矩电流发生器作为寻北仪的重要组成部分,地位极其重要,其作用是将计算机输出的以数字量形式表示的方位和水平电流值转换成模拟电流,分别输入陀螺仪方位力矩器和水平力矩器,以产生找北力矩和阻尼力矩,使陀螺仪主轴跟踪地理子午面的运动。
1 寻北仪微机控制系统
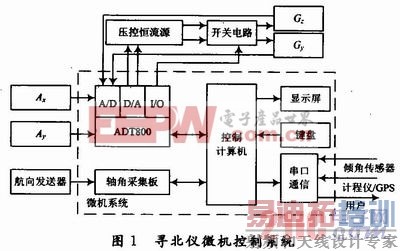
图1给出了寻北仪微机控制系统的示意图。控制计算机完成对主体仪器的检测和控制,同时负责显示、键盘等人机交互内容。控制计算机通过串口获取倾角传感器姿态、航向发送器航向、计程仪/GPS航速等信息,利用ADT800模块的A/D部分采集2路加速度计Az、Ay以及水平信号器Ey、方位信号器Ez等信息,定时解算控制电流并通过串口向其他设备发送航向信息。计算机解算得到的控制电流为数字形式,通过ADT800模块的D/A部分输出代表电流大小的电压信号,通过压控恒流源转换为电流输出,输入到主体仪器的陀螺力矩器中,使陀螺跟踪地理坐标系。
2 力矩电流发生器硬件电路
2.1 总体结构
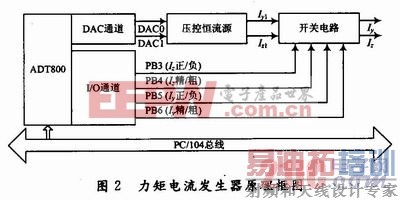
根据寻北仪总体要求,控制电流有两路,其中一路控制方位、一路控制水平,输出控制电流的最大值为80 mA,最小值为0.5 μA,电流精度要求优于O.5μA。如果不分档,要满足这样大的范围和高精度的要求,D/A转换的分辨率应为1 LSB=O.5×10-3/80=1/160 000(小于1/217而大于1/218),故需要18位的D/A转换芯片,并要求有关电路具有百万分之六的精度。为了降低对元器件的要求,将输出电流分为2档:取精电流的范围为O~1.25 mA;而粗电流的范围取为1.25~80 mA。分档后对精电流精度的误差要求为δ=O.5×10-3/1.25=O.000 4。若选取12位的D/A转换芯片,其分辨率为1LSB=1/212=0.000 244,可见能满足精度要求。为了进一步提高转换精度,采用电压控制的恒流源向负载(陀螺力矩器线圈)提供电流。由于电流是恒流源,故它不会受负载变化以及电源波动等因素影响,保证了转换精度。D/A输出的电压信号由计算机根据修正回路控制模型补偿各种寻北仪误差后解算控制输出。设计的力矩电流发生器原理框图如图2所示。
[p]
2.2 压控恒流源
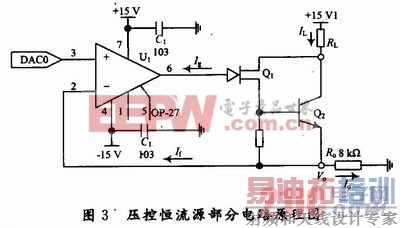
压控恒流源由运算放大器、场效应管和晶体管等组成如图3所示。恒流源输出电流IL≈IO=UDACO/RO,与负载(陀螺力矩器线圈)电阻RL及电源电压变化无关,而只受输入电压控制,起到压控恒流作用。恒流源电路难点在于其精度的提高及实现,取决于元器件的选择、印制板的设计编排、抗干扰措施的设计等因素。为此,运放采用低漂移、高精度的OP27,RO采用恒温性好的精密电阻。因为是分两档进行转换,故当进行精粗转换时,只要改变基准电阻RO的数值即可,即在基准电阻RO上并联电阻小电阻RO1将精电流转换为粗电流输出。
2.3 开关电路
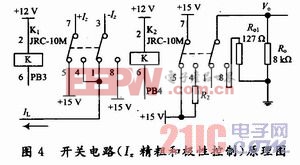
开关电路是力矩电流发生器电路的重要组成部分。恒流源只能输出单方向的电流,用开关电路可以实现流人陀螺力矩器线圈的电流方向的改变;同时,恒流源的输出电流分粗、精2档,也要对其基准电阻进行切换。开关电路的理想程度将对系统性能产生较大的影响,特别是其不对称性将造成系统零偏电流,为此要求开关电路有极高的响应速度,一般至少在μs量级。为了提高电流输出精度采用高速继电器JRC-10M控制输出电流的粗、精档和正、负极性的转换,由计算机通过控制ADT800的数字I/O口实现。由于修正回路修正电流的变化周期长,继电器的寿命可以满足系统要求。开关电路部分原理图如图4所示。R2为限流电阻,起保护作用。RO,RO1分别为粗、精电流控制电阻。PB3(PB5)控制继电器J1(J3)实现水平(方位)力矩器电流的极性控制,PB4(PB6)控制继电器J2(J4)实现水平(方位)力矩器电流的精粗控制。
2.4 ADT800模块应用
寻北仪中A/D、D/A、数字I/O功能的实现采用盛博公司的高速、高性能嵌入式数据采集和控制系统模块ADT800,它具有24路TTL/CM-OS兼容的数字I/O口、4通道12位D/A输出,完全可以满足力矩电流发生器对D/A、数字I/O通道的要求,而且剩余通道还有利于系统的改进与升级。
系统中,ADT800数字I/O地址为ADT800_BA+9,与力矩电流发生器有关的各位定义如图5所示。

利用ADT800模块D/A通道中的DAC0(DAC1)通道输出的电压信号控制方位(水平)压控恒流源电路,实现对方位轴(水平轴)的控制。
[p]
3 力矩电流发生器软件设计
考虑到寻北仪的应用背景等因素,选择DOS 6.22作为操作系统,并选用UCDOS6.O作为汉字平台。选用C++语言和Borland C++3.1集成开发环境为程序开发语言和开发环境,采用面向数据流的分析和设计方法对软件进行开发。采用多中断和TSR技术增加软件的实时性和多任务处理能力。
根据系统需求和模块化的基本原则,将寻北仪软件划分为初始化模块、管理模块、定时中断模块和通讯模块四大组成部分,如图6所示。

与力矩电流发生器有关的软件部分体现在初始化模块和定时中断模块部分,包括ADT800的初始化、D/A控制和I/O控制。init_adt800()函数主要用于对ADT800模块的初始化,包括A/D和D/A设置,初始化数字I/O口等。
定时中断模块根据处理得到的加速度计信号、计程仪/GPS航速信息、倾角传感器姿态信息、键盘装订的参数、误差补偿量及系统所处的工作状态等实时解算出陀螺控制电流,并向陀螺力矩器控制发送。
为了电流解算的方便,程序中定义了几个数组:Kj[5],Ky[5],Kz[5],C1[5],C2[5],K2[5],K3[5],分别用于存放状态转换积分系数、方位控制回路的状态转换系数、水平控制回路的状态转换系数、C1系数、C2系数、方位控制放大器放大系数、水平控制放大器放大系数。由于最终力矩电流是通过压控恒流源来实现的,因、此电流的解算就是得出相应的控制电压,解算程序如下(以罗经状态为例):
 [p]
[p]
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
