- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
Buck斩波器控制补偿电路的设计
录入:edatop.com 点击:
1 引言
感应加热电源的调功方法有很多,在进一步提高功率和逆变器的工作频率时,一般选择在整流侧调功。而斩波调功在直流电压下工作,供电功率因数高,对电网的谐波干扰小,电路的工作频率高[1],而且与逆变器控制分开,使系统更加稳定可靠,故适用于电压型逆变器使用。
在斩波调功的感应加热电源中,逆变电源的功率控制主要是转化为Buck斩波器的功率控制,即通过改变Buck斩波器的驱动脉冲来调节输出电压,从而调节电源的输出功率。但是Buck斩波器输出电压可能有偏差,环路设计就变成一项很重要的工作,它关系到电路的稳定性、响应速度、动态过冲等指标[2]。本文在分析基于功率控制的Buck斩波器的小信号模型和反馈控制模式的基础上,探讨了反馈控制的传递函数和环路参数的设计。
2 基于功率控制的Buck变换器分析

图1 Buck变换器功率闭环控制原理图
如图1所示,Buck变换器的功率控制包括3个部分,Buck斩波器、误差放大器和PWM脉冲调节器。其中,Buck斩波器反映了电源本身的特性,通过建模的方法可以分析其输入到输出、控制到输出的特性;误差放大器和PWM脉冲调节器构成反馈环节,误差放大器实质上是一个补偿网络,将给定信号与输出信号的差值放大,通过PWM脉冲调节器调节占空比d(t),最终可以调节输出电压VO,使输出稳定在给定值上。
整个功率控制环的设计可以等价为对Buck斩波器控制器设计。因此,必须首先建立控制对象――Buck斩波器在电感电流连续(CCM)模式下的小信号模型。

图2 Buck变换器电路拓扑
图2为设定Buck电路工作于电感电流连续状态(CCM),应用三端PWM平均模型方法[3],并考虑电感电阻rL和电容的ESR RC。图2中虚线框内部分为三端PWM模型,由开关管S、二极管DF和续流二极管D组成。其中,ia和ic分别代表ia(t)、ic(t)的平均变量,vap和vcp分别代表vap(t)、vcp(t)平均变量。ia(t)和ic(t)为流入a端和流出c端的电流瞬时变量,vap(t)和vcp(t)为端口ap和cp的电压瞬时变量,它们是时间的函数。将主开关管等效成受控电流源形式,二极管DF等效成受控电压源形式,由此可以得出如图3中虚线所示的三端PWM开关模型。

图3 CCM模式下的Buck变换器小信号模型
当不考虑电感内阻(通常可省略)时,可以得到Buck变换器占空比到输出的传递函数
――滤波电容的ESR
根据得到的Buck变换器的小信号模型,利用Matlab软件分析了其频率特性如图4和图5所示。图4和图5对比分析可以看出,受高频ESR的影响,在穿越频率处又产生一个相位滞后角,同时使幅频特性的斜率由-2变成-1。从整体来看,系统的低频增益低,相角裕度。

图4 不考虑ESR时的Bode图

图5 考虑ESR零点时的Bode图[p]
3 Buck斩波器补偿电路的设计
对于BUCK变换器,理想的系统应该是截止频率附近斜率为-20dB/dec,同时相位裕度大于450。考虑到实际应用和软件修改的方便,本文补偿电路采用的是PID控制策略。在PID控制中,比例项用于纠正偏差,积分项用于消除系统的稳态误差,微分项用于减小系统的超调量,增加系统稳定性[4]。在感应加热电源中,热惯性环节比电惯性环节慢得多,所以常常忽略微分项D。另外,为了提高系统的稳定性和抗干扰能力,选用具有双极点、双零点补偿的PI控制器,如图6所示。增设的两个零点补偿由于Buck变换器的双极点造成的相位滞后,其中一个极点可以抵消变换器的ESR零点,另一个极点设置在高频段,可以抑制高频噪声。

图6 增设双极点、双零点的PI补偿器
所以整个闭环系统的开环传递函数是:PWM调制调制器传递函数,传递函数K2(s)=1/Vm,而 Vm为锯齿波最大振幅。
本文用Matlab软件设计了具有双零点、双极点的PI控制器,并对设计结果进行了仿真验证。根据Bode定理,补偿网络加入后的回路增益应满足幅频渐进线以-20dB/dec的斜率穿过剪切点(点),并且至少在剪切频率左右2的范围内保持此斜率不变[5]。
由此要求,首先选择剪切频率。实际应用中,选为宜,其中为斩波器工作频率或开关管的开关频率。具体斩波器中,开关频率为50kHz,则fc =50/5=10kHz。
如图7中所示,未加补偿网络之前系统在fc=10kHz处的增益为-11.4dB,斜率为-40dB/dec,所以,补偿网络应满足如下条件:在处的增益为11.4dB,斜率为+200dB/dec,并保持此斜率在至少2的范围内不变。
取两个零点位于谐振频率附近,以抵消斩波器的2个极点(零点+2斜率补偿极点-2斜率,并补偿其相位滞后)。令一个极点抵消斩波器的ESR零点:fp1≈fz,设置一个高频极点,返fp2≈5~10fc,使高频段增益降低,以抑制高频噪声。根据以上要求,可以按如下方案设计:
fz1=fz2=1.33kHz,fp1=7.96kHz,fp2=100kHz,kp=3250。
则所设计的PI补偿器的参数如下:取R1=50kΩ,R2=19.6kΩ,R3=0.88kΩ,C1=50pF,C2=6.1nF,C3=2.36nF。实际电路中,取R1=50kΩ,R2=20kΩ,R3=0.88kΩ,C1=50pF,C2=6.20nF,C3=2..2nF。
从图7可以看出,增加PI补偿器后,系统补偿后低频增益提高,中频带宽增大,并以-20dB/dec的斜率穿越零分贝线;系统截止频率近似为10kHz,与设计期望值相同;高频衰减迅速,很好地提高了系统抗干扰性能;补偿后的相位裕度达到了750。
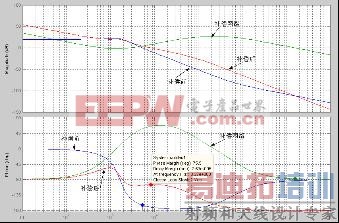
图7 闭环控制系统补偿前后Bode图
4 结论
对于高频感应加热电源广泛应用的Buck斩波调功电路,设计了双极点、双零点补偿电路,补偿后的系统不仅提高了系统响应速度,而且消除了稳态误差,系统性能明显提高。实验结果证明了这种补偿电路的实用性和有效性,对高频感应加热电源的改进和研究具有很好的参考价值。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:IC
及系统级保护功能
下一篇:电视天线放大器的制作
射频和天线工程师培训课程详情>>
