- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
混合动力电动汽车的电池管理架构分析
录入:edatop.com 点击:
用于电动汽车(EV)和混合动力电动汽车(HEV)的电池技术已经获得了显著进步,不但电池能量密度已稳步提高,而且电池还能可靠地充电和放电数千次。如果设计工程师能有效利用这些技术进步,那么就成本、可靠性和寿命而言,电动汽车和混合动力电动汽车就有潜力与传统汽车竞争。
一个电池规定的容量是指电池从100%充电状态到零充电状态所能提供的电量。充电到100%充电状态或放电到零充电状态会迅速缩短电池寿命,因此应该仔细管理电池以避免完全充电或完全放电状态。与工作在30%到70%的充电状态之间(利用40%的容量)相比,工作在10%充电状态到90%充电状态之间(利用80%的规定容量)可以将电池的充电循环总次数减少到原来的1/3或更低。
在有效电池容量和电池寿命之间进行平衡给电池系统设计工程师带来了挑战。考虑前文提到的利用40%容量与利用80%容量的情况。如果系统将电池为限制为仅使用其40%容量,以便使电池寿命延长到原来的3倍,那么电池尺寸必须增大1倍以获得与利用80%容量情况下一样多的可用容量。但这会使电池系统的重量和体积增大1倍,从而提高成本并降低效率。
汽车制造商一般要求电池寿命超过10年,且对必需的可用电池容量做了规定。电池系统设计工程师面临的挑战是必须竭尽所能用最小的电池组实现最大的容量。为达到这个目标,电池系统必须采用精密的电子电路仔细控制和监视电池。
电动汽车电池组系统
电动汽车电池组由多个电池串联叠置组成。一个典型的电池组大约有96个电池,充电到4.2V的锂离子电池而言,这样的电池组可产生超过400V的总电压。尽管汽车电源系统将电池组看作单个高压电池,每次都对整个电池组进行充电和放电,但电池控制系统必须独立考虑每个电池的情况。如果电池组中的一个电池容量稍微低于其他电池,那么经过多个充电/放电周期后,其充电状态将逐渐偏离其它电池。如果这个电池的充电状态没有周期性地与其它电池平衡,那么它最终将进入深度放电状态,从而导致损坏,并最终形成电池组故障。为防止这种情况发生,每个电池的电压都必须监视,以确定充电状态。此外,必须有一个装置让电池单独充电或放电,以平衡这些电池的充电状态。
电池组监视系统的一个重要考虑因素是通信接口。就PC板内的通信而言,常用的选项包括串行外设接口(SPI)总线、I2C总线,每种总线的通信开销都很低,适用于低干扰环境。另一个选项是控制器局域网(CAN)总线,这种总线在汽车应用中被广泛使用。CAN总线非常鲁棒,具有误差检测和故障容限特性,但是它的通信开销很大,材料成本也很高。尽管从电池系统到汽车主CAN总线的连接是值得要的,但在电池组内采用SPI或I2C通信是有优势的。
凌力尔特公司(Linear)已经推出一款使电池系统设计工程师能够满足这些苛刻要求的器件。LTC6802是一个电池组监视器IC,能测量多达12个叠置电池的电压。LTC6802还有内部开关,使电池可以单独放电,以便它们能与电池组中的其它电池进入平衡状态。
为说明电池组架构,考虑一个具有96个锂离子电池的系统。这将需要8个LTC6802来监视整个电池组,其中每个器件工作在不同的电压。当采用4.2V锂离子电池时,底端监视器件将跨接在12个电池上,电位调节范围为0V至50.4V,下一组电池的电压范围为50.4V到100.8V,顺着电池组依此类推。这些器件之间在不同的电压上进行通信带来了难以克服的挑战。人们已经考虑过多种方法,但由于汽车制造商优先考虑的重点不同,每种方法都有优点和缺点。
电池监视要求
在电池监视系统架构之间作抉择时,至少有5个需要平衡的主要要求。它们的相对重要性取决于最终客户的需求和期望。
(1)准确性。为了利用可能的最大电池容量,电池监视器需要准确。不过,汽车是一种噪声系统,在很大的频率范围内存在电磁干扰。任何的准确性降低都会对电池组寿命和性能造成有害影响。
(2)可靠性。不管采用何种电源,汽车制造商必须满足极高的可靠性标准。此外,高能量容量以及有些电池技术潜在的不稳定本性是人们担心的主要安全问题。相对于严重的电池故障,在保守性条件下执行关断操作的故障安全系统更加可取,尽管它有可能使乘客不幸滞留。因此,必须仔细监视和控制电池系统,以在系统中确保对整个电池寿命期的全面控制。为最大限度减少假的和真的故障,一个良好设计的电池组系统必须有鲁棒的通信,最大限度减少故障模式以及故障检测。
(3)可制造性。现代的汽车已包含大量采用复杂布线线束的电子产品。就汽车制造而言,增加复杂的电子电路和配线以支持电动汽车/混合动力电动汽车电池系统会使复杂性更高。总的组件和连接数量必须尽量地少以满足严格的尺寸和重量限制,并确保大批量生产是切实可行的。
(4)成本。复杂的电子控制系统可能很昂贵,最大限度减少如微控制器、接口控制器、电流隔离器和晶振等成本相对高昂的元件数量可大大降低系统的总成本。
(5)功率。电池监视器本身也是电池的负载,其较低的工作电流可提高系统效率,较低的备用电流可在汽车熄火后防止电池过度放电。
[p]
电池监视架构
图1至图4给出了4种电池监视系统架构。假设一个由96个电池组成的系统以12个电池为一组分成8组,表1对这种情况下的每种架构的优点和缺点进行了总结。在每种情况下,一个LTC6802监视一个由12个电池组成的电池组。每种架构都设计为一个自主的电池监视系统,都提供到汽车主CAN总线的CAN总线接口,且与汽车的其余部分是电流隔离的。
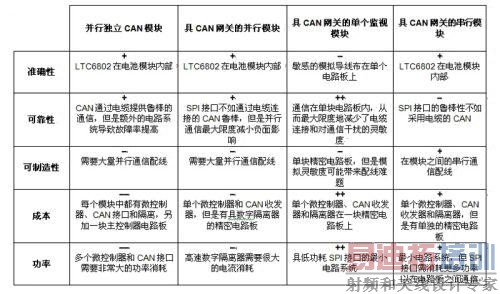
表1:电池监视架构比较
1.并行独立CAN模块(图1)
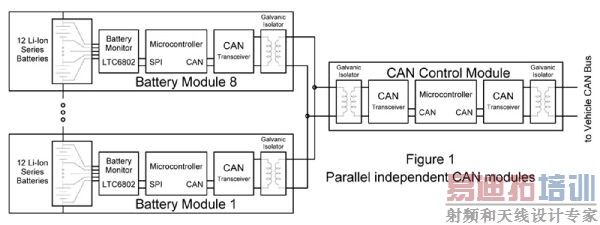
图1:并行独立CAN模块
每个由12个电池组成的模块都含有一个电路板,板上有LTC6802、微控制器、CAN接口和电流隔离变压器。系统所需的大量电池监视数据会使汽车的主CAN总线崩溃,因此这些CAN模块需要在局域CAN子网上。CAN子网由主控制器协调,该控制器还提供至汽车主CAN总线的网关。
2.具CAN网关的并行模块(图2)
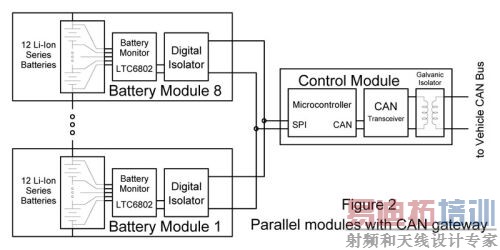
图2:具CAN网关的并行模块
每个由12个电池组成的模块都含有一个电路板,板上有LTC6802和数字隔离器。这些模块与控制器电路板有独立的接口连接,控制器电路板上含有微控制器、CAN接口和电流隔离变压器。微控制器协调这些模块并提供到汽车主CAN总线的网关。
3.具CAN网关的单个监视模块(图3)

图3:具CAN网关的单个监视模块
在这种配置中,由12个电池组成的模块内部没有监视和控制电路,而是在单个电路板上有8个LTC6802监视器IC,每个IC都连接到其电池模块。LTC6802器件通过非隔离SPI兼容串行接口通信。单个微控制器通过SPI兼容串行接口控制全部电池组监视器,并充当到汽车主CAN总线的网关。这些再加上CAN收发器和电流隔离变压器就形成了完整的电池监视系统。
4.具CAN网关的串行模块(图4)
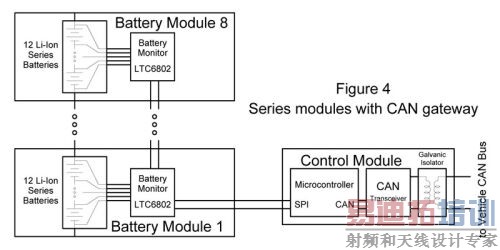
图4:具CAN网关的串行模块
这种架构类似于单个监视模块,除了每个LTC6802都在由12个电池组成的模块内部的电路板上。这8个模块通过LTC6802非隔离SPI兼容串行接口通信,这需要在电池模块对之间连接3或4个传导电缆。单个微控制器通过底部监视器IC控制全部电池组监视器,同时兼作到汽车主CAN总线的网关。这里仍然需要CAN收发器和电流隔离变压器以形成完整的电池监视系统。
电池监视架构选择
由于并行接口需要大量连接和外部隔离,第1种和第2种架构一般易产生问题。为应对复杂性提高的问题,设计工程师需要实现到每个监视器器件的独立通信。第3种和第4种架构都是限制最少的简化方法。LTC6802可满足所有这4种配置的需求,系统设计工程师可以选择LTC6802的两个版本,一个用于串行配置,一个用于并行配置。
LTC6802-1用于叠置式SPI接口配置。多个LTC6802-1器件可以通过一个接口串行连接,该接口无需外部电平移位器或隔离器就可沿着电池组来回发送数据。LTC6802-2允许单个器件用在并行架构中。这两个版本器件具有同样的电池监视规格和功能。
电动汽车对电池组有大量需求。汽车制造商希望具经济效益的电池系统,以满足他们严格的可靠性要求。凌力尔特公司最新的电池监视器IC给系统设计工程师在性能不打折扣的情况下选择最佳电池组架构带来很大的灵活性。
作者:
JimDouglass
设计经理
凌力尔特公司
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:延长锂离子电池寿命的充放电方法
下一篇:电源完整性问题以及改进思路分析-Ⅰ
射频和天线工程师培训课程详情>>
