- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
单片机控制的小型发电机逆变电源的研制
录入:edatop.com 点击:
中频汽油发电机作为一项重要的电能源,在需要备用电源和流动性作业的场合具有重要作用。其特别适用于野外、矿山施工作业,企事业单位备用电源以及灾后小功率临时用电,具有简单可靠,便于维修等特点。由于汽油发电机输出的是频率和电压都与市电不同的三相交流电,电压和频率的值比较高,不符合大多数用电设备的使用要求,而且输出电压随负载的变化波动较大,因此需配备自动电压调节器(AVR)使输出电压和频率在负载变化时达到稳定。传统的模拟控制方法输出电压质量差,耗能大。而随着计算机技术和电力电子控制技术的发展,数字化、智能化控制已成为逆变电源发展的必然。与传统的控制方法相比,微机控制的中小型汽油发电机逆变电源设计灵活,系统可靠,能实现实时的监控和诊断。但目前的产品大多只有一种模式,即满载工作方式,不能实现转速随负载的变化而实时调节。主要原因是汽油发电机的精确数学模型在实际运行中较难得到,传统的基于线性系统的控制方法容易导致不良的动态过程或系统不稳定。
本设计采用非线性方法来解决这一问题,将模糊控制应用到控制系统中去。汽油发电机的油门采用步进电动机进行控制,整个系统分为节油模式和满载模式,在负载频繁变动的场合采用满载模式,其他场合采用节油模式,根据负载的变化自动调节发电机油门,整个系统通过硬件和软件上的灵活设计保证其在节油降耗的基础上具有良好的稳定性和动态性能。
基本工作原理
汽油发电机常被作为移动式的独立电源来使用,主要由汽油机、同步交流发电机和控制器组成。设计中所用汽油机发出的三相交流电频率为350~640Hz,电压为300~550V,通过三相整流桥变成直流高电压,然后经过降压环节(降压变换器)降至350V左右,最后通过逆变环节和LC滤波器变换成220V/50Hz的交流电供负载使用。为了降低主电路的开关损耗,逆变器采用单极倍频电压型SPWM软开关DC/AC变换电路。
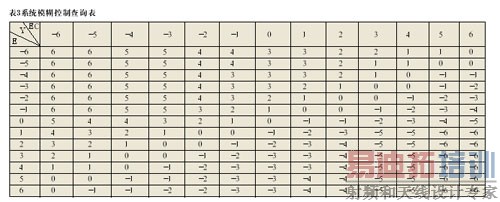
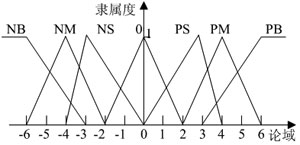
控制电路以单片机为中心,为使输出电压在负载变化时能够稳定,首先在降压环节中引入了传统的PID控制算法,将降压环节输出电压稳定在350V,以使逆变器输出稳定的220V/50Hz的交流电。当降压环节不能使输出电压达到稳定时,则根据反馈电压与给定电压的偏差及偏差的变化率作为模糊控制器的输入量进行调节,得到合适的油门开度,即可实现输出电压的稳定和良好的动态性能。
控制系统的组成
整个系统用PIC16F877作为主控芯片,它在保持高速度和低价格的前提下集成了看门狗定时器、FLASH程序存储器、10位A/D转换接口、两路PWM输出等电路,所以在进行开发设计时,外部电路比较简洁,能较好的满足要求。
控制器方案主要包括硬件和软件两部分。硬件设计主要由驱动模块、油门控制电路、逆变桥专用SPWM控制器、SG3525脉宽调制电路、电压电流检测电路等组成。设计选用既有隔离功能又具备驱动能力的TLP250作为驱动模块;逆变桥控制器采用PIC16F873进行开发,直接利用单片机自身提供的PWM输出接口输出两路SPWM驱动脉冲;反馈信号的采样检测选用单片机内部分辨率高和抗干扰能力强的A/D进行转换;整个硬件设计方案简洁,可靠性较高。
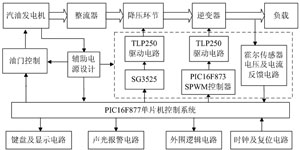
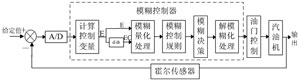
系统的软件部分主要包括油门模糊控制程序,逆变控制器SPWM脉冲输出程序,主控芯片在过压过流情况下的中断保护程序以及与逆变控制器的通讯程序。其中,发电机油门的模糊控制程序是整个系统的难点和核心,如果控制量计算不合适非但不能达到节能降耗的目的,还将造成系统的振荡和输出电压不稳定。另外,汽油发电机属于独立电源,所以控制系统的供电需利用发电机模块绕组发出的13.5±0.5V的交流电变换而成。由于逆变电路需要几路相互独立的驱动电源,为了使电路简洁,本系统设计了有多路副边输出的反激式开关电源给控制系统供电。整个设计的原理框图如图1所示。
本设计采用非线性方法来解决这一问题,将模糊控制应用到控制系统中去。汽油发电机的油门采用步进电动机进行控制,整个系统分为节油模式和满载模式,在负载频繁变动的场合采用满载模式,其他场合采用节油模式,根据负载的变化自动调节发电机油门,整个系统通过硬件和软件上的灵活设计保证其在节油降耗的基础上具有良好的稳定性和动态性能。
基本工作原理
汽油发电机常被作为移动式的独立电源来使用,主要由汽油机、同步交流发电机和控制器组成。设计中所用汽油机发出的三相交流电频率为350~640Hz,电压为300~550V,通过三相整流桥变成直流高电压,然后经过降压环节(降压变换器)降至350V左右,最后通过逆变环节和LC滤波器变换成220V/50Hz的交流电供负载使用。为了降低主电路的开关损耗,逆变器采用单极倍频电压型SPWM软开关DC/AC变换电路。
控制电路以单片机为中心,为使输出电压在负载变化时能够稳定,首先在降压环节中引入了传统的PID控制算法,将降压环节输出电压稳定在350V,以使逆变器输出稳定的220V/50Hz的交流电。当降压环节不能使输出电压达到稳定时,则根据反馈电压与给定电压的偏差及偏差的变化率作为模糊控制器的输入量进行调节,得到合适的油门开度,即可实现输出电压的稳定和良好的动态性能。
控制系统的组成
整个系统用PIC16F877作为主控芯片,它在保持高速度和低价格的前提下集成了看门狗定时器、FLASH程序存储器、10位A/D转换接口、两路PWM输出等电路,所以在进行开发设计时,外部电路比较简洁,能较好的满足要求。
控制器方案主要包括硬件和软件两部分。硬件设计主要由驱动模块、油门控制电路、逆变桥专用SPWM控制器、SG3525脉宽调制电路、电压电流检测电路等组成。设计选用既有隔离功能又具备驱动能力的TLP250作为驱动模块;逆变桥控制器采用PIC16F873进行开发,直接利用单片机自身提供的PWM输出接口输出两路SPWM驱动脉冲;反馈信号的采样检测选用单片机内部分辨率高和抗干扰能力强的A/D进行转换;整个硬件设计方案简洁,可靠性较高。
系统的软件部分主要包括油门模糊控制程序,逆变控制器SPWM脉冲输出程序,主控芯片在过压过流情况下的中断保护程序以及与逆变控制器的通讯程序。其中,发电机油门的模糊控制程序是整个系统的难点和核心,如果控制量计算不合适非但不能达到节能降耗的目的,还将造成系统的振荡和输出电压不稳定。另外,汽油发电机属于独立电源,所以控制系统的供电需利用发电机模块绕组发出的13.5±0.5V的交流电变换而成。由于逆变电路需要几路相互独立的驱动电源,为了使电路简洁,本系统设计了有多路副边输出的反激式开关电源给控制系统供电。整个设计的原理框图如图1所示。
|
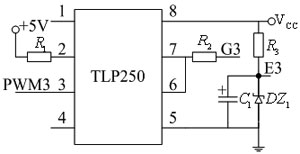
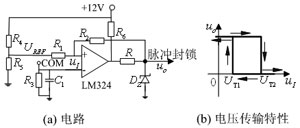
图1 系统主电路和控制电路框图 驱动电路和保护电路的设计 控制系统中降压环节和逆变器开关器件选用IGBT,根据IGBT的开关特性和对栅极驱动电路的要求,用TLP250设计的驱动电路如图2所示。PWM3为单片机发出的驱动信号,VCC为辅助电源的18V电平,G3和E3为IGBT的驱动信号,G3接IGBT的门极,E3接IGBT的源极。开通状态下的栅极驱动电压为13V,关断状态下的栅极驱动电压为-5V(稳压管反向偏置)。当G3与E3两端电压为13V时,IGBT导通,当其两端电压为-5V时,则强迫IGBT迅速关断。而当输出出现过电压时,电路将封闭TLP250的工作,从而实现对IGBT的保护。
|
 (1)
(1) 
 (2)
(2)