- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
数字式光伏阵列模拟器的设计研究
录入:edatop.com 点击:
0 引言
目前,全球性的能源危机迫使越来越多的国家开始重视新能源的研究,光伏发电作为其中很重要的一种也得到了广泛研究。但是,由于光伏电池造价高,导致研究成本很高,不利于其初期的研究。因此,很有必要设计一种成本较低,能够代替实际光伏电池阵列来进行各种光伏实验的太阳能电池模拟器。
本文所设计的太阳能电池模拟器以 BUCK 电路为基础,采用 ARM 控制,并加入了电流 PI 控制方式来改善系统动态性能和稳态精度。此外,本文还采用四折线法来对光伏电池阵列的特性曲线进行分段拟合,并进行了仿真验证。
1 系统设计目标
1.1 太阳能电池板伏安特性曲线
1.2 太阳能电池板的工程数学模型
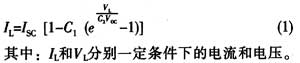
电池板出厂时都会给出短路电流、开路电压、最大功率点电流和电压这四个参数 (ISC 、 VOC 、 Im 和 Vm) ,而且四个参数符合下列公式:
这样,就可将太阳能电池板的 I-U 特性曲线转换为便于工程计算的形式。
式 (1) 描述的是标准照度 (Sref=1000 W / m2) 和标准温度 (Tref= 25 ℃ ) 下的 I-U 曲线。一般情况下 ( 照度 S ,温度 T) 的 I-U 方程可按照以下方法进行计算:
首先算出一般情况与标准情况下的温度差△ T 和相对照度差△ S :

2 系统原理及控制策略
2.1 系统原理
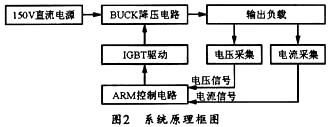
本系统的原理框图如图 2 所示,其中直流稳压电源可提供 150 V 的恒定电压输出,然后通过 BUCK 降压电路把电压加在输出负载上,以实时采集负载两端的电压和电流,再经过控制电路的控制算法改变 BUCK 电路的 PWM 占空比,以把输出电压和电流控制在预想的 I-U 曲线上。
由于在某一环境条件下,电池板的输出伏安特性曲线只有确定的一条,这样,采集系统输出的电压电流,就可以得到输出负载的大小。其负载线与输出 I-U 曲线会有一个交点,这个点就是工作点,也就是图 3 中的 B 点。这一工作点将对应一个电流和一个电压。调节 BUCK 电路的 PWM 占空比,可使输出电压电流变换为工作点处的电压电流,从而达到调节的目的。
当外部环境不变,也就是太阳能电池板的输出曲线不变时,若负载变化,则马上可以得到新的负载工作点,这样,按照以上方法调节占空比,也可使负载工作点沿负载线方向移动到我们想要的曲线上。
事实上,当负载不变,环境变化 ( 也就是曲线变化 ) 时,仍可按照事先存人的曲线数据把新的曲线调出来,然后与负载比较来得到新的工作点,之后仍按照以上方法调节占空比,使负载工作点沿负载线方向移动到我们想要的曲线上。
3 算法实现流程
采用数据表查表法时,程序在逼近工作点的过程通常需要一定时间,因为算法本身需要一个步进量,步进量的大小选取也是个问题,且方法复杂。而采用四折线法来实时计算工作点则具有计算量小,执行时间短等优点。
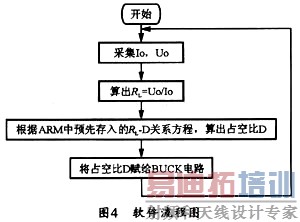
由太阳能电池板输出的伏安特性曲线可以看出,开路点和短路点处的曲线都比较平滑,故可用四条折线来模拟。在这四条折线的方程曲线中,某一负载电阻 RL 必然与这四条折线的一条相交。这样,就可以直接构造负载电阻 RL 与输出电流的关系方程,进而得到负载电阻 RL 与所需占空比 D 的关系方程。因此,在程序中只需计算一个除法和一个加法运算就可以得到所需的占空比 D ,实现起来简便易行。同样,如果需要多组曲线,只需构造多组折线方程预先存入 ARM 中就可以了。其程序执行流程图图 4 所示。
4 SIMULINK 仿真结果分析
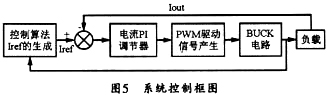
为了提高系统的响应速度,减小稳态误差,本设计在电流反馈中使用了 PI 控制。其控制框图如图 5 所示。根据本文的控制策略,从测得的输出电压电流可以得到输出负载 RL ,进而得到参考电流 Iref 。把该电流与实际输出电流相减再送人 PI 控制器中,然后用 PI 输出控制调节占空比,进而使实际输出电流与 Iref 一致。
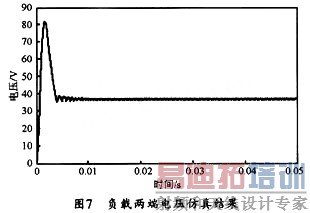
根据系统电压要求及 BUCK 电路特性可以算出电感 L 取 2 mH ,电容 C 取 100 μ F , ARM 存入的 I-U 曲线的开路电压为 40 V ,短路电流为 3 A 。当取 RL=24 Ω时,根据光伏电池的 I-U 曲线,系统应输出 36.54 V 电压,输出电流为 1.524 A ,仿真后得到负载两端的电压波形如图 7 所示。
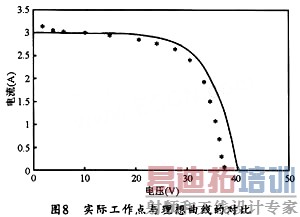
更换负载电阻的大小可使每个阻值对应一对电压电流值,也就是负载工作点。图 8 用符号‘ * '表示。把这些工作点与预存的光伏电池的 I-U 曲线相比可知,这些工作点大致在光伏电池 I-U 曲线附近,其多点仿真结果如图 8 所示。
本文用 SIMULINK 开发出了一种新的太阳能电池阵列模拟器的仿真模型,并提出了一种基于四折线法来进行光伏电池阵列输出曲线的分段拟合方法。论证了一种用电流反馈 PI 控制 BUCK 电路做成的光伏电池阵列模拟器。由仿真结果可以看到,本系统可以较快的拟合出想要的电池阵列输出 I-V 曲线。可以在光伏发电系统研究中,代替实际的太阳能电池来进行实验。
目前,全球性的能源危机迫使越来越多的国家开始重视新能源的研究,光伏发电作为其中很重要的一种也得到了广泛研究。但是,由于光伏电池造价高,导致研究成本很高,不利于其初期的研究。因此,很有必要设计一种成本较低,能够代替实际光伏电池阵列来进行各种光伏实验的太阳能电池模拟器。
本文所设计的太阳能电池模拟器以 BUCK 电路为基础,采用 ARM 控制,并加入了电流 PI 控制方式来改善系统动态性能和稳态精度。此外,本文还采用四折线法来对光伏电池阵列的特性曲线进行分段拟合,并进行了仿真验证。
1 系统设计目标
1.1 太阳能电池板伏安特性曲线
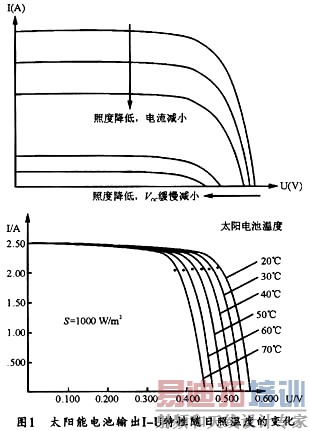
1.2 太阳能电池板的工程数学模型
电池板出厂时都会给出短路电流、开路电压、最大功率点电流和电压这四个参数 (ISC 、 VOC 、 Im 和 Vm) ,而且四个参数符合下列公式:
这样,就可将太阳能电池板的 I-U 特性曲线转换为便于工程计算的形式。
式 (1) 描述的是标准照度 (Sref=1000 W / m2) 和标准温度 (Tref= 25 ℃ ) 下的 I-U 曲线。一般情况下 ( 照度 S ,温度 T) 的 I-U 方程可按照以下方法进行计算:
首先算出一般情况与标准情况下的温度差△ T 和相对照度差△ S :
2 系统原理及控制策略
2.1 系统原理
本系统的原理框图如图 2 所示,其中直流稳压电源可提供 150 V 的恒定电压输出,然后通过 BUCK 降压电路把电压加在输出负载上,以实时采集负载两端的电压和电流,再经过控制电路的控制算法改变 BUCK 电路的 PWM 占空比,以把输出电压和电流控制在预想的 I-U 曲线上。
由于在某一环境条件下,电池板的输出伏安特性曲线只有确定的一条,这样,采集系统输出的电压电流,就可以得到输出负载的大小。其负载线与输出 I-U 曲线会有一个交点,这个点就是工作点,也就是图 3 中的 B 点。这一工作点将对应一个电流和一个电压。调节 BUCK 电路的 PWM 占空比,可使输出电压电流变换为工作点处的电压电流,从而达到调节的目的。
当外部环境不变,也就是太阳能电池板的输出曲线不变时,若负载变化,则马上可以得到新的负载工作点,这样,按照以上方法调节占空比,也可使负载工作点沿负载线方向移动到我们想要的曲线上。
事实上,当负载不变,环境变化 ( 也就是曲线变化 ) 时,仍可按照事先存人的曲线数据把新的曲线调出来,然后与负载比较来得到新的工作点,之后仍按照以上方法调节占空比,使负载工作点沿负载线方向移动到我们想要的曲线上。
3 算法实现流程
采用数据表查表法时,程序在逼近工作点的过程通常需要一定时间,因为算法本身需要一个步进量,步进量的大小选取也是个问题,且方法复杂。而采用四折线法来实时计算工作点则具有计算量小,执行时间短等优点。
由太阳能电池板输出的伏安特性曲线可以看出,开路点和短路点处的曲线都比较平滑,故可用四条折线来模拟。在这四条折线的方程曲线中,某一负载电阻 RL 必然与这四条折线的一条相交。这样,就可以直接构造负载电阻 RL 与输出电流的关系方程,进而得到负载电阻 RL 与所需占空比 D 的关系方程。因此,在程序中只需计算一个除法和一个加法运算就可以得到所需的占空比 D ,实现起来简便易行。同样,如果需要多组曲线,只需构造多组折线方程预先存入 ARM 中就可以了。其程序执行流程图图 4 所示。
4 SIMULINK 仿真结果分析
为了提高系统的响应速度,减小稳态误差,本设计在电流反馈中使用了 PI 控制。其控制框图如图 5 所示。根据本文的控制策略,从测得的输出电压电流可以得到输出负载 RL ,进而得到参考电流 Iref 。把该电流与实际输出电流相减再送人 PI 控制器中,然后用 PI 输出控制调节占空比,进而使实际输出电流与 Iref 一致。
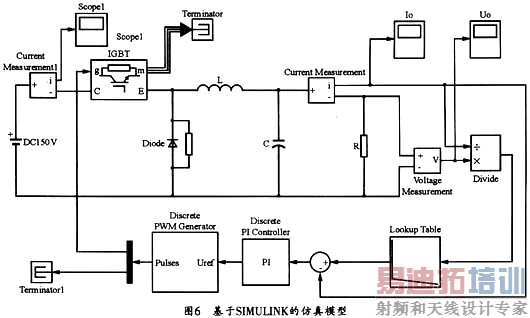
根据系统电压要求及 BUCK 电路特性可以算出电感 L 取 2 mH ,电容 C 取 100 μ F , ARM 存入的 I-U 曲线的开路电压为 40 V ,短路电流为 3 A 。当取 RL=24 Ω时,根据光伏电池的 I-U 曲线,系统应输出 36.54 V 电压,输出电流为 1.524 A ,仿真后得到负载两端的电压波形如图 7 所示。
更换负载电阻的大小可使每个阻值对应一对电压电流值,也就是负载工作点。图 8 用符号‘ * '表示。把这些工作点与预存的光伏电池的 I-U 曲线相比可知,这些工作点大致在光伏电池 I-U 曲线附近,其多点仿真结果如图 8 所示。
本文用 SIMULINK 开发出了一种新的太阳能电池阵列模拟器的仿真模型,并提出了一种基于四折线法来进行光伏电池阵列输出曲线的分段拟合方法。论证了一种用电流反馈 PI 控制 BUCK 电路做成的光伏电池阵列模拟器。由仿真结果可以看到,本系统可以较快的拟合出想要的电池阵列输出 I-V 曲线。可以在光伏发电系统研究中,代替实际的太阳能电池来进行实验。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:数字电路的抗干扰设计
下一篇:太阳能独立发电应用系统-草坪灯装置设计实例
射频和天线工程师培训课程详情>>
