- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线的蓄电池组充放电集散控制系统的设计
录入:edatop.com 点击:
引 言
随着高科技及其产业的迅速发展,大存储容量的蓄电池组能源系统已经越来越被人们所重视,在诸如电动汽车、大功率UPS、电厂及变电站直流系统、通信系统等很多领域中都得到广泛应用。
蓄电池组是由一定数量的单体电池串联组成的,在使用过程中可能会有百次直至千次的充、放电。各单体蓄电池过充电、过放电或者放电不足均易引起电池的故障,某个单体蓄电池的故障也会导致整个蓄电池组的故障和损坏。因此,在线实时检测蓄电池组充放电各单体蓄电池的充放电电压、充放电时的温升以及整个蓄电池组的充放电电流、电压等参数,及时找出损坏或性能显著降低的蓄电池,对于延长电池的使用寿命、降低成本特别是提高直流供电系统的可靠性至关重要。鉴于上述情况,我们研制了蓄电池组充、放电集散控制系统,它克服了早期的集中采集检测方法中布线多、线路长,浪费人力物力又易引入干扰的缺点,同时CAN总线多主节点、高可靠性以及扩充性好等特点使得该系统具有较好的控制性能和广泛的应用前景。
系统的组成及工作原理
CAN总线简介
控制器局域网络CAN (Controller Area Network)总线属于现场总线的范畴,是由德国BOSH公司为分布式系统在强电磁干扰环境下可靠工作而设计的一种串行通信网络,它具有如下显著特点: (1)多主方式工作,各节点均可在任意时刻主动向网络上的其它节点发送信息而不分主从,且无需站地址等节点信息,利用这一特点可方便地构成多机备份系统; (2)采用独特的非破坏性总线仲裁技术,优先级高的节点优先传送数据,能满足不同的实时性要求; (3)广播式数据通信,采用CSMA /CD协议进行总线控制及数据通信。当节点向网上发送数据时,其它节点都同时收到数据,具有点对点、一点对多点及全局广播传送数据的功能; (4)高传输可靠性,总线上每帧有效字节数最多为8 个,并有CRC及其它校验措施,数据出错率极低,且在某一节点出现严重错误时可自动脱离总线,使总线上的其它操作不受影响; (5)特别适合于网络化智能设备,最高速率可至1Mbps,此时通信距离为40m,通信速率选择5kbps时,通信距离可长达10km,可根据实际需要选择使用。CAN总线只有两根导线,系统扩充时直接将新节点挂接在总线上即可,系统容易实现冗余设计。所以从适用性、可靠性和低成本的角度考虑,本系统中我们选择了CAN总线来构成底层通信网络。
集散控制系统的基本结构及工作原理
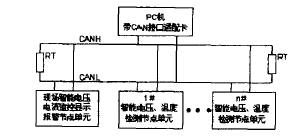
系统由上位机(通用PC机,带CAN接口适配卡) ,n个智能电压、温度等数据采集节点单元(具体个数随单体蓄电池数而定,但最多不超过110-2 = 108个) , 1个现场智能电压、电流监控显示报警节点单元及CAN总线网络组成,其系统结构如图1所示。
随着高科技及其产业的迅速发展,大存储容量的蓄电池组能源系统已经越来越被人们所重视,在诸如电动汽车、大功率UPS、电厂及变电站直流系统、通信系统等很多领域中都得到广泛应用。
蓄电池组是由一定数量的单体电池串联组成的,在使用过程中可能会有百次直至千次的充、放电。各单体蓄电池过充电、过放电或者放电不足均易引起电池的故障,某个单体蓄电池的故障也会导致整个蓄电池组的故障和损坏。因此,在线实时检测蓄电池组充放电各单体蓄电池的充放电电压、充放电时的温升以及整个蓄电池组的充放电电流、电压等参数,及时找出损坏或性能显著降低的蓄电池,对于延长电池的使用寿命、降低成本特别是提高直流供电系统的可靠性至关重要。鉴于上述情况,我们研制了蓄电池组充、放电集散控制系统,它克服了早期的集中采集检测方法中布线多、线路长,浪费人力物力又易引入干扰的缺点,同时CAN总线多主节点、高可靠性以及扩充性好等特点使得该系统具有较好的控制性能和广泛的应用前景。
系统的组成及工作原理
CAN总线简介
控制器局域网络CAN (Controller Area Network)总线属于现场总线的范畴,是由德国BOSH公司为分布式系统在强电磁干扰环境下可靠工作而设计的一种串行通信网络,它具有如下显著特点: (1)多主方式工作,各节点均可在任意时刻主动向网络上的其它节点发送信息而不分主从,且无需站地址等节点信息,利用这一特点可方便地构成多机备份系统; (2)采用独特的非破坏性总线仲裁技术,优先级高的节点优先传送数据,能满足不同的实时性要求; (3)广播式数据通信,采用CSMA /CD协议进行总线控制及数据通信。当节点向网上发送数据时,其它节点都同时收到数据,具有点对点、一点对多点及全局广播传送数据的功能; (4)高传输可靠性,总线上每帧有效字节数最多为8 个,并有CRC及其它校验措施,数据出错率极低,且在某一节点出现严重错误时可自动脱离总线,使总线上的其它操作不受影响; (5)特别适合于网络化智能设备,最高速率可至1Mbps,此时通信距离为40m,通信速率选择5kbps时,通信距离可长达10km,可根据实际需要选择使用。CAN总线只有两根导线,系统扩充时直接将新节点挂接在总线上即可,系统容易实现冗余设计。所以从适用性、可靠性和低成本的角度考虑,本系统中我们选择了CAN总线来构成底层通信网络。
集散控制系统的基本结构及工作原理
系统由上位机(通用PC机,带CAN接口适配卡) ,n个智能电压、温度等数据采集节点单元(具体个数随单体蓄电池数而定,但最多不超过110-2 = 108个) , 1个现场智能电压、电流监控显示报警节点单元及CAN总线网络组成,其系统结构如图1所示。
|
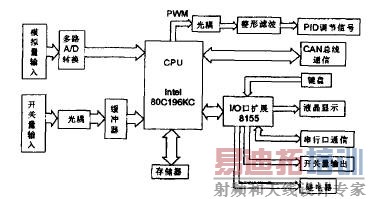
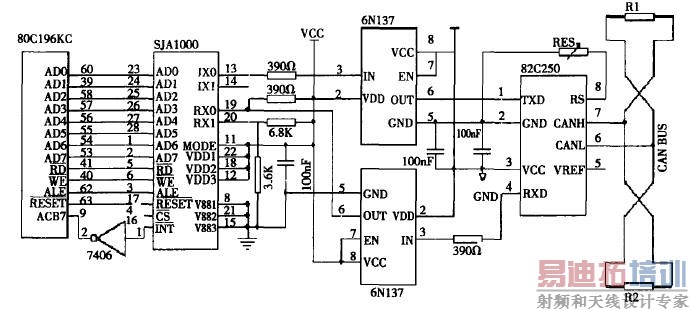
图1:集散控制系统结构框图 系统中的每个节点都以INTEL80C196KC单片机为核心,配以PH IL IPS半导体公司的SJA1000独立CAN控制器和PCA82C250CAN收发器构成。PC机和CAN控制器之间采用双口RAMIDT7132作为双向数据传送通道。现场智能电压电流监控显示报警节点单元另采用北京青云创新科技发展有限公司的液晶显示模块LCM320240ZK和简易键盘,用于显示各智能检测节点单元发送来的现场数据和向各智能检测节点单元发送简短的PID调节等控制命令。智能电压、温度检测节点单元则配以相应的电压、电流、温度传感器及相应的处理电路,以完成电压、电流及温度信号的采集工作。 图1中的各个智能电压、温度检测节点单元分别安装固定于各单体蓄电池旁,具有相同的硬件结构。其主要功能是采集各单体蓄电池的充放电电压,蓄电池在充放电过程中的温升等现场数据,经过滤波和相应变换后通过CAN 总线网络送到上位机和现场监控显示报警节点单元;现场智能电压、电流监控显示报警节点单元负责检测蓄电池组充放电电压、电流,接收各智能检测节点单元发来的经滤波、变换等处理后的现场数据,对主要参数进行显示、存储,完成对蓄电池组充放电电压、电流的数字P ID调节控制,并对各单体蓄电池进行故障诊断、锁定和报警,其数据交换也是通过CAN总线网络送到上位机。CAN总线网络部分主要由CAN总线通信介质和相应的通信软件组成。本系统通信介质采用双绞线,负载连接在CANH和CANL之间,终端匹配阻抗值为信号的特征阻抗值,约为120Ω。 节点单元硬件设计 节点单元工作原理 本系统中存在现场智能电压电流监控显示报警节点单元和智能电压、温度检测节点单元等不同类型的节点,但其核心电路基本类似,只是外围接口电路和传感器等采集电路有所区别。以带有监控显示报警的节点单元为例,其结构框图如图2所示。
|