- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
精度位置控制应用中运用NanoPWM驱动器代替线性驱动器
录入:edatop.com 点击:
作者: Maksim Apanasenko, Boaz Kramer, Ze'ev Kirshenboim.
ACS Motion Control
介绍
许多工业应用, 半导体晶圆检测测系统, 有机发光二极管平板显示器生产和检测,,这些应用要求极其高的运动性能,在低速匀速运动的纳米级运动中保持亚纳米级的静止抖动和跟随误差。目前线性伺服驱动已经被应用于满足这些需求。这种类型的驱动器提供了惊人的性能,可以达到这些应用需要的线性度。但是由于线性伺服驱动器效率低,热损耗大,体积大、笨重。新一代450mm半导体比目前的300mm半导体大得多,而且这样的系统需要驱动器具有更高的能力,更高的电压和电流。这就要求线性驱动器体积非常大,而且能量很有限,因此限制了这个系统的性能和生产量,增加了系统成本,降低了系统可靠性。
NanoPWM是开关PWM驱动器的线性化,这种线性化基于一种独特的专利技术。
在过去5年中ACS研发的PWMBoost可以满足这样的位置系统。NanoPWM驱动器提供更好的位置性能和跟随性能,并且克服了线性驱动器的缺点。NanoPWM非常紧凑,有更高的效率和可靠性,可以提供更高的能量,电流和电源,而且更经济。
伺服驱动器的种类
两种主要的伺服驱动器:线性驱动器和开关PWM驱动器。
图1描绘了线性驱动器的原理框图。这个驱动器像一个可变电阻一样工作,根据电流需求和负载阻抗调节电流。供电电压被分配在马达和驱动器之前。当马达以低速运行被要求提供大力矩时,电流就是高的,加在马达上的电压就是低的,加在驱动器上的电压就是高的。此时驱动器的损耗是很高的。
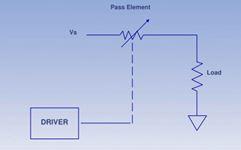
图1线性驱动器的原理图描述
图2描述了开关PWM驱动的原理图框图。驱动器作为通断开关工作。马达作为平均电流的综合集成。平均电流是开关占空比的线性函数。任意给定时刻开关或者是断开的(没有电流流过开关)或者是导通的(有低电压加在开关上)。因此开关损耗是很低的。
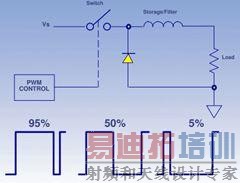
图2—PWM驱动器的原理图描述
.
表1.各种类型驱动器的优缺点总结
表1—各种驱动器的优缺点

需求
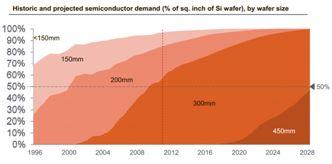
表3-半导体晶圆蓝图
半导体晶圆检测系统要求亚纳米级的静止误差和纳米级跟随误差。今天,大多数系统是为了处理直径300mm 的晶圆。下一代晶圆的直径将达到450mm。这要求有同样或者更好的位置控制性能,由于尺寸和重量更大,我们需要更大的马达和驱动器来保持和提高系统的吞吐量。这样的系统要求驱动器具有线性驱动器和PWM驱动的优点。NanoPWMTM就是这样的驱动器。它很高效,可以实现高电压操作,提供高电流。它很紧凑而且成本更低。
图4和5介绍了NaonPWM的主要特点。
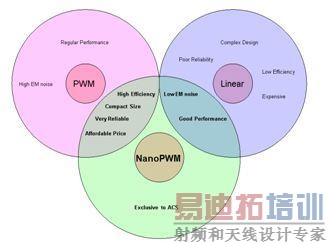
lowEM noise :低电磁噪声
good performance:良好的性能
High efficiency:高效率
Compact size:结构紧凑
Very reliable:非常可靠
Affordable price:可接受的价位
Regular performance:一般性能
High EM noise :高电磁噪声
Complex design:设计复杂
Poor reliability :可靠性较差
Low efficiency:效率低
Expensive:造价高
图4-NanoPWM兼容了线性驱动器和PWM驱动器的优点

图5-相同功率的线性驱动器和PWM驱动器的尺寸对比
性能比较
测试系统包括一个无贴心直线马达带动的直线平台,交叉滚珠轴承机械和基本分辨率为0.4mico-meter的magnascale激光模拟量SIN-COS编码器。运动控制系统包括ACS MC4U控制模块和三种不同的驱动器
• NanoPWM
• Standard PWM标准PWM驱动器
• Standalone linear drive单独线性驱动器
在每个测试中,驱动器和算法都进行一定的调试使其达到最优性能和相似的带宽。
入表2中描述,驱动器具有相同的特性
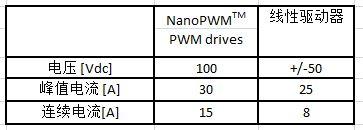
Table 2 – 驱动器的主要性能指标
测试以下性能指标:
静止抖动
低速跟随误差
静止误差—NanoPWMvs线性驱动器
测试结果在表6中,总结在表格3中
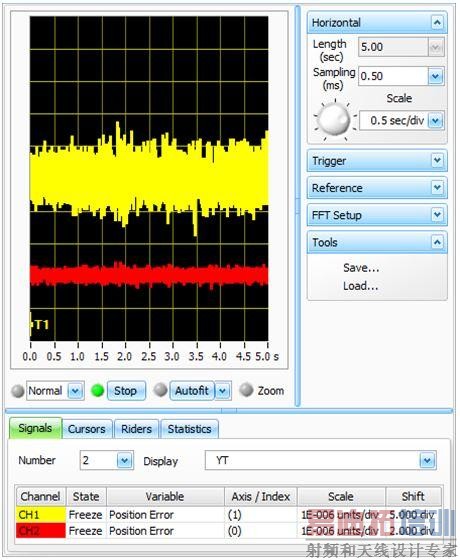
表6 –NanoPWM(红色)VS线性驱动器(黄色)静止抖动
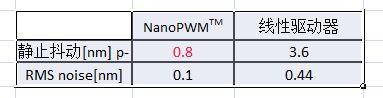
Table 3 - NanoPWM (红色) VS 线性驱动器 (黄色) 静止抖动
使用NanoPWM驱动器比使用线性驱动器时的静止抖动明显减小(小4.5倍:0.8nmVr3.6nm)
低速跟随误差-NanoPWM VS线性驱动器.
跟随误差是在1mm/s的速度下测量的,测试结果在表图7中,总结在表格4中
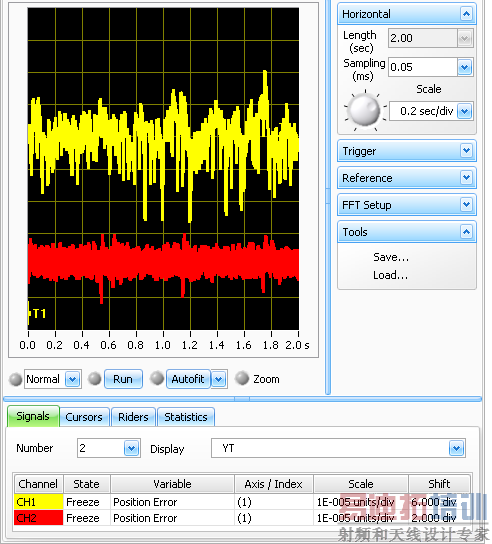
图7 NanoPWM驱动器(红色)VS线性驱动器(黄色)的跟随误差
NanoPWM 线性驱动器

Table 4 - NanoPWM (红) VS线性驱动器 (黄) 跟随误差
使用NanoPWM驱动器时跟随误差明显减小,结果得到跟平滑的运动轨迹,这样的轨迹在晶圆检测过程中十分重要。
静止误差-NanoPWM VS标准PWM驱动器
测试结果见图8,表5进行了总结
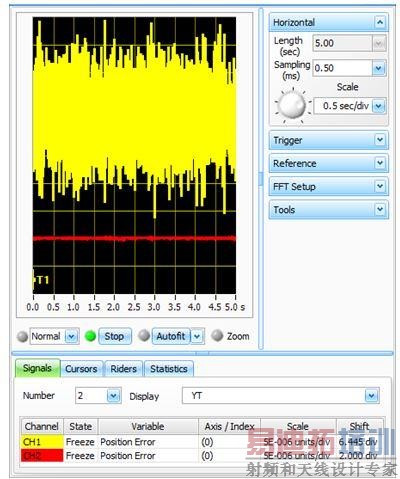
图8-NanoPWM(红色)vs PWM(黄色)静止抖动
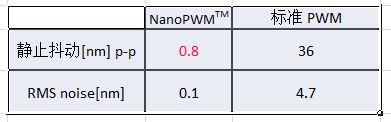
Table 5 - NanoPWM (红色) VS PWM drive (黄色) 静止抖动
使用NanoPWM驱动器的静止误差比使用标准PWM驱动器小两个数量级。平板显示器加工系统比较庞大,对于马达电压和电流的要求超过了目前商业化了的线性马达的容许能力。有机LED显示要求更高的精确度,跟随精度和静止抖动,都要在几个纳米的误差范围内。NanoPWM给这样的需求提出了解决方案。
总结
本文介绍了一直新型的线性开关伺服驱动器-NanoPWM,这种驱动器具有线性驱动器和PWM驱动器的所有优点。使用NanoPWM驱动器得到的运动性能超过了目前已经商业化了的线性伺服驱动器的性能。这种驱动器更小,更可靠,更便宜。
这种驱动器可以满足更高的运动性能需求,适合半导体晶圆检测和平板显示器制造系统。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:马达控制三相变频器中相电流Shunt
检测电路设计
下一篇:光伏并网逆变器的设计
射频和天线工程师培训课程详情>>
