- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
超高速控制与传统占空比调制控制的比较研究
录入:edatop.com 点击:
作者: Ning Dai,Raphael Horton
在电信和计算机行业的推动下,以太网系统不断增加插槽密度,容量达到了100Gbps,系统中的专用集成电路 (ASIC)和微处理器则以更高的频率和更低的电压运行。为了与以太网技术保持同步,开关电源必须能在静态模式下提供高精度设定点、低纹波和噪音,同时能在动态模式下进行快速瞬态响应,这反过来又要求在载荷点 (POL) 中实施的控制方案不仅能够提供上述功能,还要能在具有极低的等效串联电阻(ESR)输出电容和较高输入输出电压比的环境下正常工作。麦瑞的Hyper Speed Control(超高速控制)架构可为微处理器和ASIC提供最佳的POL解决方案。本文阐述了传统脉宽调制(PWM)控制与Hyper Speed Control的工作原理并对比了这两种控制方案的瞬态响应性能。最后,本文还提供了一项实验结果以解释他们的不同之处。
工作原理
麦瑞Hyper Speed Control的独特架构不仅可实现超快速瞬态响应,同时还能降低输出电容,使高输入∕输出电压比(Vin/Vout) 运行成为可能。为了阐述该控制机制,特借用图1所示的结构图来说明。如图1所示,输出电压经分压器R1和R2分压后由反馈引脚FB读取并通过低增益跨导放大器在误差比较器上与内部基准电压VREF 进行比较。如果反馈电压下降且放大器输出小于内部基准电压,误差比较器将触动控制逻辑,生成一个导通时间周期。导通时间周期长度由“固定Ton估计”电路预先确定:

其中,Vout为功率级输出电压,Vin为功率级输入电压,fsw为开关频率。
在导通时间周期结束后,设备会进入关断周期。此时,内部高压侧驱动器将关断高压侧金属氧化物半导体场效应晶体管(MOSFET),低压侧驱动器将导通低压侧金属氧化物半导体场效应晶体管(MOSFET)。关断时间周期取决于反馈电压VFB。如果反馈电压决定的关断时间周期小于控制器内部设计决定的最小关断时间TOFF(min),则控制环路将使用TOFF(min)来维持升压电容中的能量以驱动高压侧金属氧化物半导体场效应晶体管(MOSFET)。在反馈电压的波谷区,若反馈电压降至基准电压以下,关断时间终止,下一个导通时间周期通过控制电路开启。图2显示了转换器的典型波形。

图1:Hyper Speed Control结构图
图2:Hyper Speed Control控制环路定时如果反馈电压低于基准电压,则触发导通时间开始。
众所周知的过渡性占空比调制转换器具有恒定开关频率,该频率由振荡器生成。控制开关状态(导通或关断)的开关控制信号通过对比控制电压Vc与重复(锯齿)波形产生,如图 3(a) 所示。控制电压通常通过放大误差,即与输出电压成正比的反馈电压与其理想电压水平(基准电压)之间的差异获得。由PWM控制器中的内部振荡器产生的重复锯齿波频率决定了开关频率。当放大的误差信号大于锯齿波形时,开关控制信号变高,导致开关开启。否则,开关是断开的。转换器的占空比可表示如下

其中,D为PWM转换器的占空比,即导通持续时间与开关时间周期之比,是可变量;Ts为恒定的开关周期;Ton为开关的导通时间。图3显示了占空比调制控制机构与控制环路定时的控制原理。

图3:占空比调制控制的结构图与控制定时
通过研究这两种不同的控制方案,我们可以看到他们都可在稳态状态下以恒定频率运行,但他们使用的导通和关断开关的标准不同。Hyper Speed Control依靠内部基准电压和内部导通时间估计器控制开关,而占空比PWM控制则依靠内部振荡器和基准控制开关的占空比。因此,Hyper Speed Control凭借其恒定的导通时间控制,可用于输入电压与输出电压之比较高的应用;而PWM控制具有最低的占空比限制,意味着不适合输入电压与输出电压之比过高的应用。
瞬态响应
在负载瞬变时,这两种控制方案的表现也不同。图4说明了当输出电流从0增至满载时Hyper Speed Control和占空比调制控制的典型波形。对于Hyper Speed Control来说,当负载瞬变时,输出电压下降,反馈电压也随之下降。但控制环路侦测到反馈电压小于内部基准电压时,控制器将立即进入最小关断时间(在一个开关周期中)以最大程度地减少输出电压下降。由于导通时间恒定,可最大限度地减少关断时间,这意味着转换器能够以最大导通时间的高开关频率从输入端向输出端转移能量。对于占空比调制控制而言,在负载瞬变时,输出和反馈电压下降。然而,由于占空比是由前一个开关周期的电压预先确定,占空比到下一个开关周期才会增加,

图4:Hyper Speed Control和PWM控制的瞬态响应典型波形
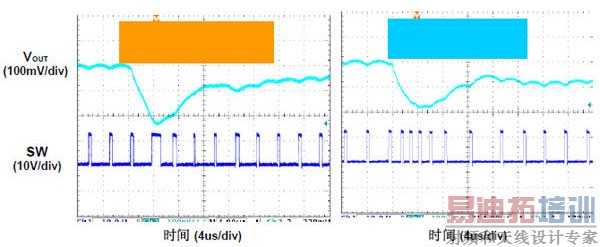
图5:具有Hyper Speed Control和占空比调制控制的转换器的瞬态响应测量结果
这会导致电压大幅下降。图5显示了具有 Hyper Speed Control和占空比调制控制的直流-直流转换器的瞬态响应测量结果。组建两个直流-直流转换器;一个使用麦瑞超高速控制器MIC2164,另一个使用占空比调制PWM控制器。两个都具有2.2μH的输出感应器并在同样的条件下进行测试:12V的输入电压,1.5V的 输出电压、100μF的输出电容、瞬时负载以 5A/μs的转换速率从0A递增至5A。具有超高速控制器的转换器的压降为208mV,而具有传统占空比调制控制器的转换器的压降为244mV,比前者高17% 。为达到与具有超高速控制器的转换器同样的压降,具有占空比调制控制器的转换器须另外增加47μF的输出电容。
总结
本文阐述了Hyper Speed Control和占空比调制控制的工作原理和机制,并对他们在稳态和动态条件下的性能进行了比较。Hyper Speed Control具有可实现快速瞬态响应的优势,与占空比调制控制相比所需输出电容较少。借助外部纹波注入网络,对于任何类型的输出电容它能够保证系统的稳定;而占空比调制控制对输出电容具有最低的ESR要求,以保证其控制环路的稳定性。因此,它非常适合于输入电压与输出电压之比较大的应用。
在电信和计算机行业的推动下,以太网系统不断增加插槽密度,容量达到了100Gbps,系统中的专用集成电路 (ASIC)和微处理器则以更高的频率和更低的电压运行。为了与以太网技术保持同步,开关电源必须能在静态模式下提供高精度设定点、低纹波和噪音,同时能在动态模式下进行快速瞬态响应,这反过来又要求在载荷点 (POL) 中实施的控制方案不仅能够提供上述功能,还要能在具有极低的等效串联电阻(ESR)输出电容和较高输入输出电压比的环境下正常工作。麦瑞的Hyper Speed Control(超高速控制)架构可为微处理器和ASIC提供最佳的POL解决方案。本文阐述了传统脉宽调制(PWM)控制与Hyper Speed Control的工作原理并对比了这两种控制方案的瞬态响应性能。最后,本文还提供了一项实验结果以解释他们的不同之处。
工作原理
麦瑞Hyper Speed Control的独特架构不仅可实现超快速瞬态响应,同时还能降低输出电容,使高输入∕输出电压比(Vin/Vout) 运行成为可能。为了阐述该控制机制,特借用图1所示的结构图来说明。如图1所示,输出电压经分压器R1和R2分压后由反馈引脚FB读取并通过低增益跨导放大器在误差比较器上与内部基准电压VREF 进行比较。如果反馈电压下降且放大器输出小于内部基准电压,误差比较器将触动控制逻辑,生成一个导通时间周期。导通时间周期长度由“固定Ton估计”电路预先确定:
其中,Vout为功率级输出电压,Vin为功率级输入电压,fsw为开关频率。
在导通时间周期结束后,设备会进入关断周期。此时,内部高压侧驱动器将关断高压侧金属氧化物半导体场效应晶体管(MOSFET),低压侧驱动器将导通低压侧金属氧化物半导体场效应晶体管(MOSFET)。关断时间周期取决于反馈电压VFB。如果反馈电压决定的关断时间周期小于控制器内部设计决定的最小关断时间TOFF(min),则控制环路将使用TOFF(min)来维持升压电容中的能量以驱动高压侧金属氧化物半导体场效应晶体管(MOSFET)。在反馈电压的波谷区,若反馈电压降至基准电压以下,关断时间终止,下一个导通时间周期通过控制电路开启。图2显示了转换器的典型波形。
图1:Hyper Speed Control结构图
图2:Hyper Speed Control控制环路定时如果反馈电压低于基准电压,则触发导通时间开始。
众所周知的过渡性占空比调制转换器具有恒定开关频率,该频率由振荡器生成。控制开关状态(导通或关断)的开关控制信号通过对比控制电压Vc与重复(锯齿)波形产生,如图 3(a) 所示。控制电压通常通过放大误差,即与输出电压成正比的反馈电压与其理想电压水平(基准电压)之间的差异获得。由PWM控制器中的内部振荡器产生的重复锯齿波频率决定了开关频率。当放大的误差信号大于锯齿波形时,开关控制信号变高,导致开关开启。否则,开关是断开的。转换器的占空比可表示如下
其中,D为PWM转换器的占空比,即导通持续时间与开关时间周期之比,是可变量;Ts为恒定的开关周期;Ton为开关的导通时间。图3显示了占空比调制控制机构与控制环路定时的控制原理。
图3:占空比调制控制的结构图与控制定时
通过研究这两种不同的控制方案,我们可以看到他们都可在稳态状态下以恒定频率运行,但他们使用的导通和关断开关的标准不同。Hyper Speed Control依靠内部基准电压和内部导通时间估计器控制开关,而占空比PWM控制则依靠内部振荡器和基准控制开关的占空比。因此,Hyper Speed Control凭借其恒定的导通时间控制,可用于输入电压与输出电压之比较高的应用;而PWM控制具有最低的占空比限制,意味着不适合输入电压与输出电压之比过高的应用。
瞬态响应
在负载瞬变时,这两种控制方案的表现也不同。图4说明了当输出电流从0增至满载时Hyper Speed Control和占空比调制控制的典型波形。对于Hyper Speed Control来说,当负载瞬变时,输出电压下降,反馈电压也随之下降。但控制环路侦测到反馈电压小于内部基准电压时,控制器将立即进入最小关断时间(在一个开关周期中)以最大程度地减少输出电压下降。由于导通时间恒定,可最大限度地减少关断时间,这意味着转换器能够以最大导通时间的高开关频率从输入端向输出端转移能量。对于占空比调制控制而言,在负载瞬变时,输出和反馈电压下降。然而,由于占空比是由前一个开关周期的电压预先确定,占空比到下一个开关周期才会增加,
图4:Hyper Speed Control和PWM控制的瞬态响应典型波形
图5:具有Hyper Speed Control和占空比调制控制的转换器的瞬态响应测量结果
这会导致电压大幅下降。图5显示了具有 Hyper Speed Control和占空比调制控制的直流-直流转换器的瞬态响应测量结果。组建两个直流-直流转换器;一个使用麦瑞超高速控制器MIC2164,另一个使用占空比调制PWM控制器。两个都具有2.2μH的输出感应器并在同样的条件下进行测试:12V的输入电压,1.5V的 输出电压、100μF的输出电容、瞬时负载以 5A/μs的转换速率从0A递增至5A。具有超高速控制器的转换器的压降为208mV,而具有传统占空比调制控制器的转换器的压降为244mV,比前者高17% 。为达到与具有超高速控制器的转换器同样的压降,具有占空比调制控制器的转换器须另外增加47μF的输出电容。
总结
本文阐述了Hyper Speed Control和占空比调制控制的工作原理和机制,并对他们在稳态和动态条件下的性能进行了比较。Hyper Speed Control具有可实现快速瞬态响应的优势,与占空比调制控制相比所需输出电容较少。借助外部纹波注入网络,对于任何类型的输出电容它能够保证系统的稳定;而占空比调制控制对输出电容具有最低的ESR要求,以保证其控制环路的稳定性。因此,它非常适合于输入电压与输出电压之比较大的应用。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
