- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于μPD795的CCD相机系统中驱动电路的设计
录入:edatop.com 点击:
电荷耦合器件(CCD)是一种转换式图像传感器,是以电荷作为信号的MOS型半导体器件。其基本结构是一种密排的MOS电容器,能够存储由入射光在CCD光敏单元激发而产生的电荷,并且能在适当的时钟脉冲驱动下,把存储的电荷以电荷包的形式定向传输转移,从而完成从光信号到电信号的转换。CCD具有体积小、质量轻、功耗小、工作电压低和抗烧毁等特点,在分辨率、动态范围、灵敏度等方面的优越性也是很多其他器件无法比拟的,目前CCD器件已经广泛地应用到各种各样的成像系统中,成为现代电子学和现代测试技术中最活跃的传感器之一。
电荷耦合器件不同于普通的MOS型半导体器件,它需要在较复杂的驱动脉冲下才能正常工作。在CCD应用技术中,用于产生CCD驱动时序的设计,是CCD数据采集电路设计的关键之一。产生驱动时序的方法多种多样,常用的有下面几种:EPROM方法、直接数字电路驱动方法、单片机、专用IC等,各有优缺点。由于CPLD的集成度高,在速度和时序控制上具有较大的优势,而且在电路设计完成后,可以根据需要将CPLD逻辑重新编程,因此选用CPLD来设计CCD的驱动时序是一种不错的选择。目前,大多数CCD工作时序设计都是采用CPLD来实现和完成的。
1μPD795结构原理及驱动时序
1.1 μPD795结构原理
μPD795是NEC公司生产的高灵敏度、低暗电流、具有内置放大电路和采样保持电路的线阵CCD图像传感器。它内部包含一列1 024像元的光敏二极管和两列525位的电荷转移寄存器。可以工作在5 V驱动(脉冲)和12 V电源条件下。同时μPD795具有出色的光电特性,很高的转移效率,达到了99.996%。主要由三个模块组成:表面积分单元,用于产生电荷信号;CCD移位寄存器,用于电荷信号转移;输出放大器,将电荷信号转换成电压信号。
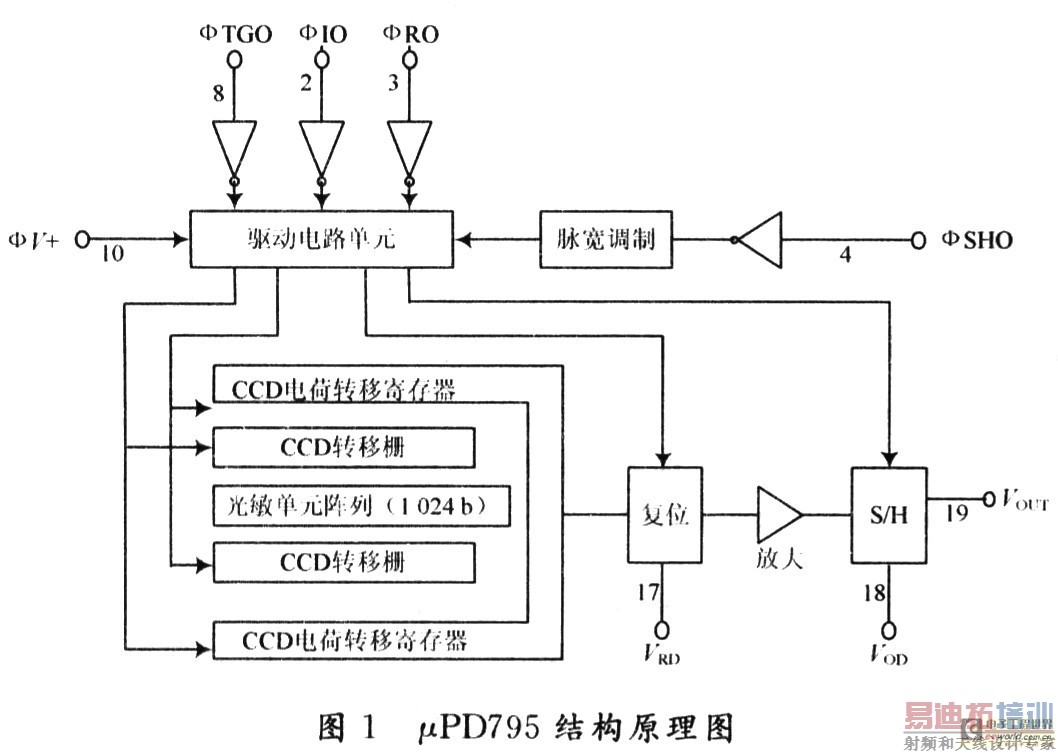
结构原理图如图1所示,封装形式为20脚DIP。中间一排是由光敏二极管构成的光敏阵列,有效单元为1 024位,其作用是接收外界的光信号,并转换为相应的电荷信号,光敏阵列两侧分别为转移栅和电荷转移寄存器,在传输门时钟信号φTGO的作用下,像元的光电信号分别转移到位于其两侧的CCD转移栅。而后CCD的MOS电容中的电荷信号在φIO的作用下从输出端口串行输出。
1.2 驱动时序分析
CCD器件需要三路以上的驱动时序脉冲。各驱动脉冲必须严格满足相位时序要求,才能保证CCD器件正常工作。该芯片正常工作需要四路脉冲,分别为电荷转移寄存器时钟φIO、复位时钟φRO、采样保持时钟φSHO以及传输门时钟φTGO。他们之间的时序关系如图2所示。

CCD的驱动时序是一组周期性且关系比较复杂的脉冲信号,它是影响CCD器件的信号处理能力、转移效率、信噪比等性能的一个重要因素。常规的驱动电路设计有以下几种方法:面阵CCD通常采用相应的专用驱动IC,但是难以调试,而且无法适应于其他CCD器件;线阵CCD可采用数字电路驱动、单片机I/O口驱动,或者选用可编程逻辑器件针对特定器件的驱动时序要求完成驱动电路设计。为了使CCD器件在各种光强信号下正常工作,需要设置不同的积分时间和相应的驱动脉冲,传统的单一驱动脉冲无法满足工作要求,必须设计一种可提供多种驱动脉冲的电路。
2 系统框图
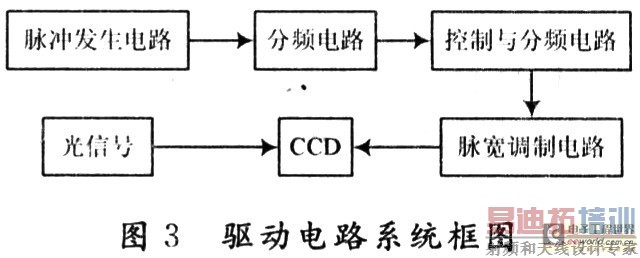
整个驱动电路系统可以分为四个部分;如图3所示,包括脉冲发生电路、分频电路、控制与分频电路以及脉宽调制电路。脉冲发生电路可由74LS00和7.5 MHz的晶振以及相应的阻容电路组成,该部分相对简单,电阻和电容的数目也不多。分频电路可选用D触发器/JK触发器,如 74LS(HC)74,74LS(HC)76,均带置位、清零端,较易控制;采用同步计数器74LS163实现逻辑功能,该计数器为四位二进制可编程计数器。当然也可以采用82C54(10MHz可编程)。控制电路由μPD4011,μPD4012,μPD4013以及74LS27组成。μPD4011作为外部控制信号可以起到调整频率的作用。脉宽调制电路由与非门、或非门和带有直接清零功能的二进制同步计数器组成。
3 驱动电路
CCD 图像传感器的驱动。简言之就是通过驱动电路产生CCD正常工作所需的特定脉冲。为了产生如图2所示的各路驱动脉冲以及满足传感器的小型化和工作速度的要求。采用复杂可编程逻辑器件CPLD实现其逻辑功能是一个较好的选择。CPLD是基于乘积项结构,可实现各种逻辑运算.全硬件结构,具有极大的灵活性和通用性,使用方便,硬件测试和实现快捷,开发效率高,成本低,上市时间短,技术维护简单,工作可靠性好等优点。在该设计中,μPD795所需的驱动脉冲是在 Max+PlusⅡ环境下完成设计并编译、校验后在线下载到CPLD器件内部,实现逻辑功能。实际的驱动电路的原理结构图如图4所示。该例中的驱动电路并不复杂,所用的器件也有限。但若驱动脉冲种数继续增加,则电路的复杂程度也要成比例增加。该设计中采用EPM7064SLC44-7,该芯片由64个宏单元组成,是Altera公司生产的MAX7000S系列中芯片的一种,可以实现在线编程。在Max+PlusⅡ环境下进行了仿真,得到了满意的结果后进行了硬件设计。

4 实验结果
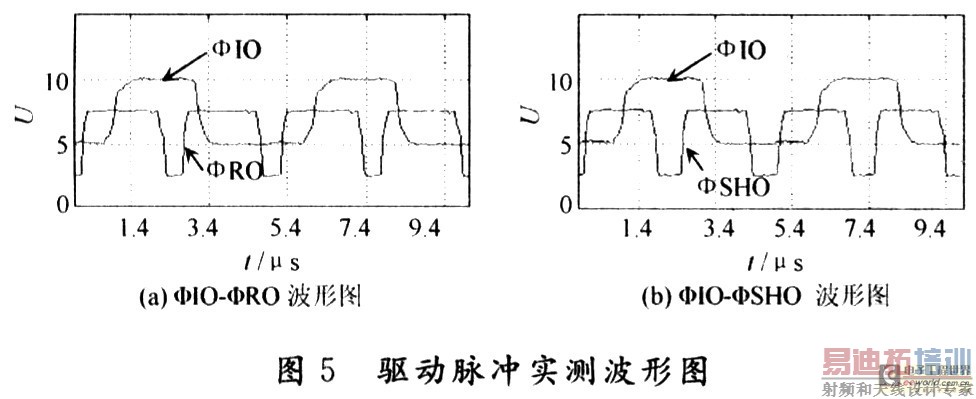
对制作PCB板用示波器和逻辑分析仪进行了测试,测量档位为2 μs,测量CCD驱动波形φIO,φRO,φSHO如图5所示。纵坐标中低电平为0 V,高电平为5 V。
5 结 语
时序电路中的CPLD,除提供CCD正常工作所需的时序外,还保留了部分引脚和功能模块,可以作为增加某些新功能的需要。从该驱动电路与信号处理单元及上位机和显示器构成的完整线阵CCD相机系统,以及从实测波形数据来看。该驱动电路在实际使用中稳定可靠,达到了设计前的要求,这说明用CPLD构成线阵 CCD相机驱动电路是一种切实可行的方案。
电荷耦合器件不同于普通的MOS型半导体器件,它需要在较复杂的驱动脉冲下才能正常工作。在CCD应用技术中,用于产生CCD驱动时序的设计,是CCD数据采集电路设计的关键之一。产生驱动时序的方法多种多样,常用的有下面几种:EPROM方法、直接数字电路驱动方法、单片机、专用IC等,各有优缺点。由于CPLD的集成度高,在速度和时序控制上具有较大的优势,而且在电路设计完成后,可以根据需要将CPLD逻辑重新编程,因此选用CPLD来设计CCD的驱动时序是一种不错的选择。目前,大多数CCD工作时序设计都是采用CPLD来实现和完成的。
1μPD795结构原理及驱动时序
1.1 μPD795结构原理
μPD795是NEC公司生产的高灵敏度、低暗电流、具有内置放大电路和采样保持电路的线阵CCD图像传感器。它内部包含一列1 024像元的光敏二极管和两列525位的电荷转移寄存器。可以工作在5 V驱动(脉冲)和12 V电源条件下。同时μPD795具有出色的光电特性,很高的转移效率,达到了99.996%。主要由三个模块组成:表面积分单元,用于产生电荷信号;CCD移位寄存器,用于电荷信号转移;输出放大器,将电荷信号转换成电压信号。
结构原理图如图1所示,封装形式为20脚DIP。中间一排是由光敏二极管构成的光敏阵列,有效单元为1 024位,其作用是接收外界的光信号,并转换为相应的电荷信号,光敏阵列两侧分别为转移栅和电荷转移寄存器,在传输门时钟信号φTGO的作用下,像元的光电信号分别转移到位于其两侧的CCD转移栅。而后CCD的MOS电容中的电荷信号在φIO的作用下从输出端口串行输出。
1.2 驱动时序分析
CCD器件需要三路以上的驱动时序脉冲。各驱动脉冲必须严格满足相位时序要求,才能保证CCD器件正常工作。该芯片正常工作需要四路脉冲,分别为电荷转移寄存器时钟φIO、复位时钟φRO、采样保持时钟φSHO以及传输门时钟φTGO。他们之间的时序关系如图2所示。
CCD的驱动时序是一组周期性且关系比较复杂的脉冲信号,它是影响CCD器件的信号处理能力、转移效率、信噪比等性能的一个重要因素。常规的驱动电路设计有以下几种方法:面阵CCD通常采用相应的专用驱动IC,但是难以调试,而且无法适应于其他CCD器件;线阵CCD可采用数字电路驱动、单片机I/O口驱动,或者选用可编程逻辑器件针对特定器件的驱动时序要求完成驱动电路设计。为了使CCD器件在各种光强信号下正常工作,需要设置不同的积分时间和相应的驱动脉冲,传统的单一驱动脉冲无法满足工作要求,必须设计一种可提供多种驱动脉冲的电路。
2 系统框图
整个驱动电路系统可以分为四个部分;如图3所示,包括脉冲发生电路、分频电路、控制与分频电路以及脉宽调制电路。脉冲发生电路可由74LS00和7.5 MHz的晶振以及相应的阻容电路组成,该部分相对简单,电阻和电容的数目也不多。分频电路可选用D触发器/JK触发器,如 74LS(HC)74,74LS(HC)76,均带置位、清零端,较易控制;采用同步计数器74LS163实现逻辑功能,该计数器为四位二进制可编程计数器。当然也可以采用82C54(10MHz可编程)。控制电路由μPD4011,μPD4012,μPD4013以及74LS27组成。μPD4011作为外部控制信号可以起到调整频率的作用。脉宽调制电路由与非门、或非门和带有直接清零功能的二进制同步计数器组成。
3 驱动电路
CCD 图像传感器的驱动。简言之就是通过驱动电路产生CCD正常工作所需的特定脉冲。为了产生如图2所示的各路驱动脉冲以及满足传感器的小型化和工作速度的要求。采用复杂可编程逻辑器件CPLD实现其逻辑功能是一个较好的选择。CPLD是基于乘积项结构,可实现各种逻辑运算.全硬件结构,具有极大的灵活性和通用性,使用方便,硬件测试和实现快捷,开发效率高,成本低,上市时间短,技术维护简单,工作可靠性好等优点。在该设计中,μPD795所需的驱动脉冲是在 Max+PlusⅡ环境下完成设计并编译、校验后在线下载到CPLD器件内部,实现逻辑功能。实际的驱动电路的原理结构图如图4所示。该例中的驱动电路并不复杂,所用的器件也有限。但若驱动脉冲种数继续增加,则电路的复杂程度也要成比例增加。该设计中采用EPM7064SLC44-7,该芯片由64个宏单元组成,是Altera公司生产的MAX7000S系列中芯片的一种,可以实现在线编程。在Max+PlusⅡ环境下进行了仿真,得到了满意的结果后进行了硬件设计。
4 实验结果
对制作PCB板用示波器和逻辑分析仪进行了测试,测量档位为2 μs,测量CCD驱动波形φIO,φRO,φSHO如图5所示。纵坐标中低电平为0 V,高电平为5 V。
5 结 语
时序电路中的CPLD,除提供CCD正常工作所需的时序外,还保留了部分引脚和功能模块,可以作为增加某些新功能的需要。从该驱动电路与信号处理单元及上位机和显示器构成的完整线阵CCD相机系统,以及从实测波形数据来看。该驱动电路在实际使用中稳定可靠,达到了设计前的要求,这说明用CPLD构成线阵 CCD相机驱动电路是一种切实可行的方案。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:TPS54310的平均SPICE模型的建立与应用
下一篇:LED-MR16射灯电源的问题及其BP1361解决方案
射频和天线工程师培训课程详情>>
