- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
二极管箝位型三电平逆变器的电磁兼容研究
录入:edatop.com 点击:
中点箝位型(Neutral Point Clamped)三电平逆变器由A.Nabae等人在1980年的IAS会议上提出。这种拓扑结构拥有很多优点,比如:
1)可用耐压较低的器件实现高压输出;
2)与传统两电平逆变器相比,通过电平数的增加,改善了输出电压波形;
3)dv口/df相对较小,从而改善了装置的EMI特性。
因其优越的性能,在高压大功率场合得到了广泛的应用。
在三电平逆变器系统中,承受高压大电流的功率器件的开关过程会产生过高的dv/dt及di/dt,而且系统内部强电信号与弱电信号共存,模拟电路与数字电路共存,接地与PCB布线不当,以及辅助电源的不稳均会在系统内部产生干扰;另外系统供电电网与周围电磁环境的影响也会对系统产生电磁干扰,导致系统无法正常工作,因此做好EMC设计至关重要。
本文给出了基于DSP与CPLD数字控制系统的二极管箝位三电平逆变器的系统设计方案,重点分析了系统设计中的电磁兼容问题,并针对这些问题,分别从硬件和软件两方面提出了有效的解决方案。
1 三电平逆变器系统与工作原理
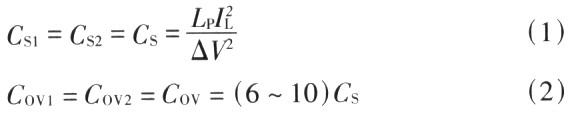
图1给出了三电平逆变器系统框图,系统由以下几部分组成:主功率电路、基于DSPTMS320LF2407和CPLD XC95144XL的数字控制系统、采样电路、驱动保护电路、辅助电源和PC机。其中,二极管箝位三电平逆变器如图2所示.
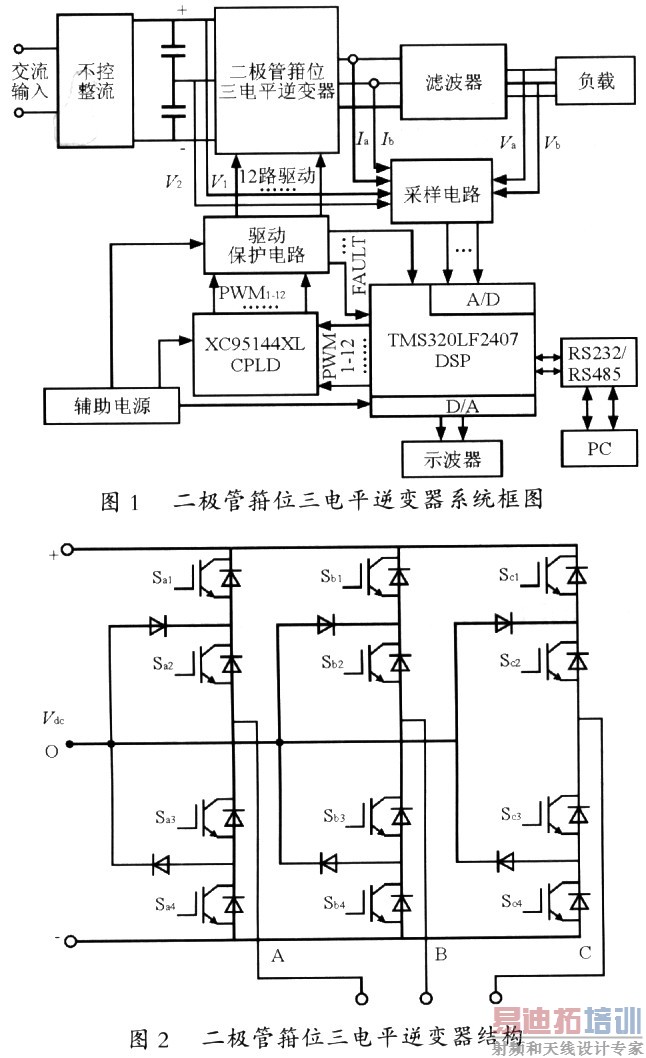
每相桥臂采用一对1200V,100A的IGBT模块串联,模块内置续流二极管,采用2200V,100A的二极管模块进行箝位。采样电路对逆变器输出电压、电流和直流母线电压采样,利用DSP内部自带的A/D转换器进行模数转换,并利用软件控制DSP输出PWM信号,在CPLD内部做逻辑和死区处理。驱动保护电路接收来自CPLD的12路PWM信号来驱动IGBT,并在IGBT短路或过流时,将FAULT保护信号送至DSP,封锁PWM信号。
假设图l中直流侧两个电容等容量,且电压相等,均为Vdr/2。则A相桥臂输出电压(以0点为参考点)与开关状态的关系如表1所列,(其中1表示开关接通,O表示开关断开),可见每相均可以输出+Vdr/2,O,一Vdr/2三个电平。

2 系统抗干扰原理与方法
要构成电磁干扰需要满足3个条件:干扰源、噪声耦合途径、被干扰设备。耦合途径包括传导耦合和辐射耦合两种。前面已经指出由于三电平逆变器系统的复杂结构,会受到来自系统外部和系统内部自身的干扰,下面主要讨论系统中的传导耦合,并从硬件和软件两个方面给出有效抗干扰措施。
2.l 硬件抗干扰措施
2.1.1 电源输入端口的抗干扰措施
供电电网输入端口处的干扰主要是传导干扰,包括两方面:一是电网上的干扰通过电源线引入设备,这种干扰可以是来自供电网其他设备产生的传导性干扰,也可以是空间的电磁波在电源线上产生的共模干扰;另一方面主要是由于整流电路本身产生的谐波干扰和电磁噪声,以及由它供电的后级电路产生的电磁噪声以传导耦合形式导入电网,对同一电网内的其他设备产生干扰。
辅助电源均采用高频开关电源,由于采用了PWM技术,所以其开关器件工作在高频通断状态,这种高频的快速通断过程便会产生高频噪声,并在负载上直接传导电磁噪声(共模、差模两种噪声传导方式),严重影响数字控制系统正常工作。
EMI滤波器可以抑制因瞬态噪声或高频噪声措成的干扰.是解决传导干扰十分有效的方法。
通常所用的EMI滤波器结构如图3所示,其中C1。C2是差模电容L1,L2是共模电感,C3、C4、C5、C6是共模电容。

但是,这种EMI滤波器结构自身存在着明显的不足:由于两个差模电容C1,C2自身有寄生电感,所以两个寄生电感之间会产生耦合,而且它们又会与共模电感产生耦合。这样,在高频范围会严重影响EMI滤波器的性能。为此,我们采用了改进的结构,如图4所示。

在改进的EMI滤波器结构中,两个差模电容采用X型连接,这样做的好处是可以大大减小甚至消除电容中寄生电感引起的耦合,极大地改善了EMI滤波器的高频性能。
2 1.2 主功率电路抗干扰措施
1)采用BUSSBAP结构设计 直流母线采用BUSBAR结构设计,即采用铜板或铜条代替导线,使直流母线平行导体化,这样可以降低配线电感,减小因其产生的干扰。同时,对抑制IGBT通断时的浪涌申压和dv/df也有效果。
2)缓冲吸收电路 IGBT通断时产生的dv/df及di/df会对系统的其他部分造成干扰,在大功率应用场合,由于电压、电流等级较高,干扰会更加严重,必须根据实际要求选择吸收电路形式并调整元件参数。
为此采用了图5所示的结构简单的缓冲电路,它充分利用三电平结构的特性,靠外部电容CS1,CS2的充放电来钳制内部IGBT上的电压,使之不突变。Cov1和Cov2吸收主回路杂散电感上的能量,从而钳制过电压,Cov1和Cov2要尽量靠近桥臂侧。吸收电阻月s1及Rs2采用无感电阻,吸收二极管采用快恢复二极管。缓冲电路元件参数选择可按式(1)、式(2)、式(3)选取。

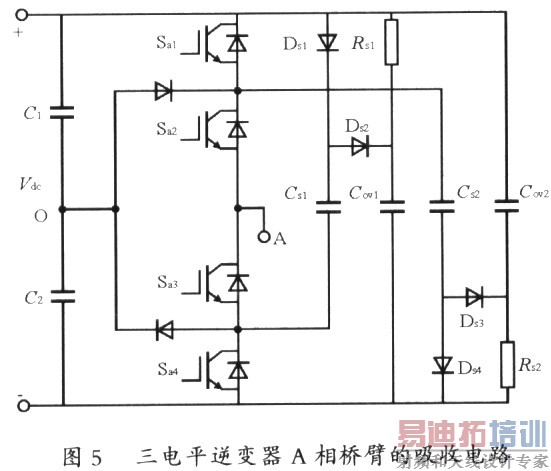
式中:Lp为母线上的杂散电感;
IL为负载电流;
△V为吸收电压峰值;
f为IGBT开关频率。
3)其他抗干扰措施在逆变器输出端连接低通滤波器;IGBT的G、E端子之间接上小容量电容器,降低dv/df及di/dt。
2.1.3 数字控制系统抗干扰措施
本文采用基于DSP和CPLD的数字控制系统,为提高控制系统的准确性和可靠性,从以下几个方面进行电磁兼容设计,提高控制系统的抗干扰能力。
1)辅助电源抗干扰措施数字控制系统输入电源为5V,通过LMll17T转换成的3.3V为DSP和CPLD供电。直流电源的故障主要有输出电压不稳,欠压或掉电。直流电压不稳实质是反复的欠压过程,会直接对数字控制系统产生干扰。为此采用了MC34064电源监视IC电路监视5V直流电源输出电压,图6给出了电路接法。

当电压低于4.59V时,监视电路将产生持续的复位信号使DSP和CPLD处于复位状态,避免其不正常操作带来的事故。当电源输出恢复正常时(>4.6lV),电路经过一个规定的延迟时间后撤消复位信号,保证数字控制系统正常工作,传播延时时间由CDLY确定。
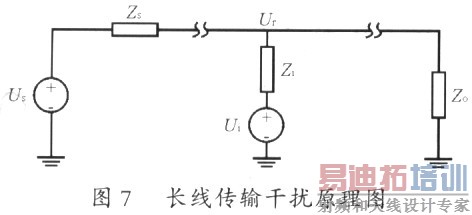
2)光纤抗干扰技术数字控制系统输出的PWM信号,在传输过程中会受到长线传输干扰的影响。其原理如图7所示。干扰幅度可由式(4)确定。

式中:Ur为干扰源;
Ui为干扰电压幅度;
Zs为等效信号源阻抗;
Zo为等效负载阻抗;
Zi为等效干扰源阻抗。
PWM信号在传输过程中,若传输线较长,强电脉冲会通过传输线的分布电容和分布电感对PWM信号产生干扰。如果信号受到干扰或延时太大,则主电路中IGBT就无法正确地开通或关断,有可能会造成短路而榻坏器件。
为此,本文在数字控制系统与驱动电路之间采用光纤连接。图8给出了采用光纤接收和发射的连接方式。
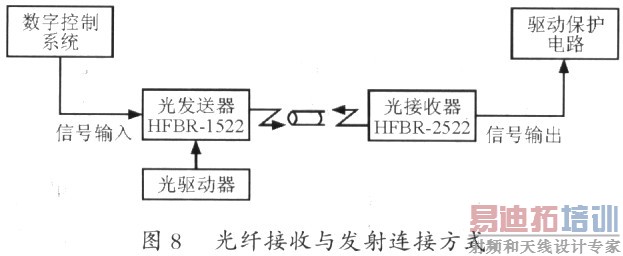
光纤连接的发射和接收之间没有直接的电气连接,能够精确传送PWM控制信号,不仅解决了功率电路和控制电路之间的强弱电隔离,抗电磁干扰问题,而且能够实现驱动信号的远距离传送,延时小。
3)PCB抗干扰措施
(1)采用电源平面和地平面 由于数字控制系统是高频和高速的数字脉冲电路,所以它们的信号接地系统必须具有极低的地阻抗,电路中所有元件接到参考地的引线电感尽可能小,另外为了减小电源瞬态噪声电压,要减小电源线的引线电感。所以,本文的数字控制系统采用四层板结构,中间两层为单独的电源层和地层,可以大大减小因公共阻抗耦合产生的传导干扰。
(2)去耦滤波抗干扰配置去耦电容可以抑制因负载变化而产生的噪声,具体做法是:在电源输入端要跨接电解电容;在数字集成电路芯片的VCC和GND之间用高频低电感的陶瓷电容进行去耦滤波,去耦电容供电回路的面积越小越好,越接近芯片越好,去耦电容引线越短越好。
(3)数字与模拟电路的处理数字控制系统中既有模拟电路又有数字电路,要把它们尽量分开,并且将模拟电路的地和数字电路的地分开,最后再接到一起,在共接点选用合适的电感,将数字电路中的最强干扰隔离掉,接法如图9所示。

另外,集成数字电路芯片没有用到的管脚不要浮空,应该接到GND或VCC,防止不必要的开关转换和噪声产生。
2.1.4 驱动保护电路抗干扰措施
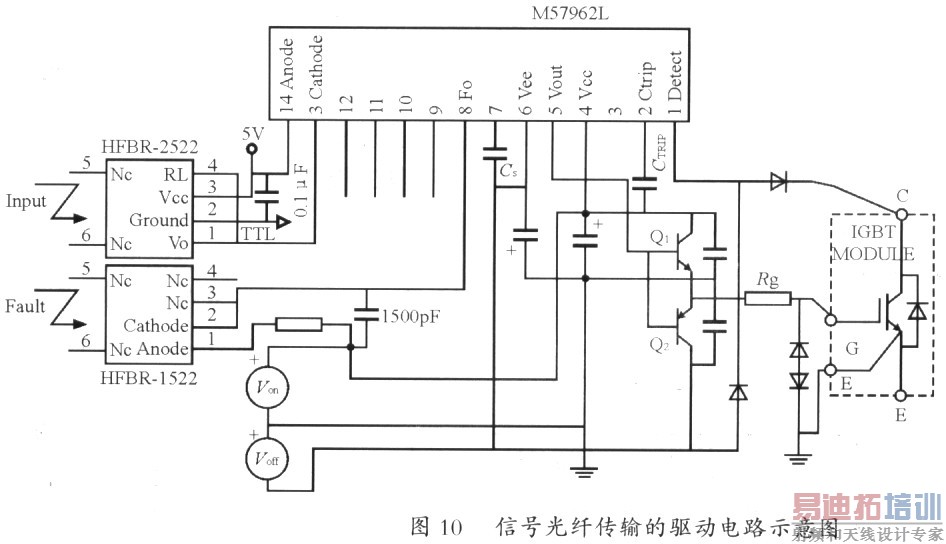
本文采用Powerx公司的集成驱动模块M57962L,在抗干扰方面,它有以下优点:
1)内部具有高速光耦,将驱动脉冲信号与驱动电路内部隔离,这样控制电路与驱动电路实现了电气隔离,防止因电气耦合产生的干扰;
2)栅极驱动采用双极性控制电压,使用负的栅极电压可以获得较高的抗干扰性,图lO是采用光纤传送的驱动电路示意图。
此外,我们采用了以下抗干扰措施。
1)将门极驱动电阻扩大到样本中记载的标准值的2~3倍,这样可以使交换时间变长,从而使IGBT的dv/dt及di/dt降低。
2)为了抑制主功率电路对驱动电路的干扰,需要对驱动电路的元件合理布局,如图ll所示。
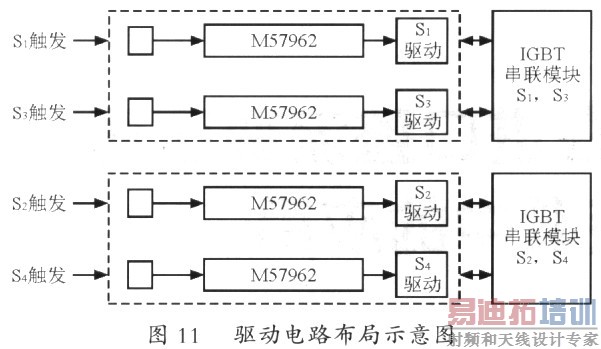
(1)S1和S3相邻,S2和S4相邻,两组之间保持适当的距离。
(2)驱动保护电路与IGBT模块之间选用阻抗高、抗共模干扰能力强的双绞线,引线尽可能短,以减小寄生电感,两线间互绞越密效果越好。
3)每个lCBT触发电路均采用通过变压器隔离的相互独立的电源供电,以避免电磁噪声通过公共阻抗耦合对彼此产生干扰。
2.2 软件抗干扰措施
除了以上采用的硬件抗干扰措施外,充分利用软件抗干扰的能力能够最大程度地抑制干扰。软件抗干扰主要包括以下两方面:
1)消除模拟输入信号的噪声干扰;
2)在数字控制系统受到干扰、程序跑飞时,使程序复位,能够重新正常工作针对上面两种情况,采取了以下抗干扰措施。
(1)数字滤波可以有效地消除模拟输入信号的噪声,从而抑制于扰。常用方法包括限幅滤波、中值滤波、算术平均滤波、加权平均滤波等。
(2)设置看门狗 当DSP受到干扰引起程序乱飞,使程序进入“死循环”时,通过中断服务程序,使程序回到初始化的第一行。
(3)软件陷阱DSPTMS320LF2407有多达64K的程序存储空间。通常在使用时会有大量未用的空间。在这些区域设置一段引导程序,当程序受到干扰跳到该区域时,引导程序将会强行指向专门对程序出错进行处理的程序段地址,从而使程序重新纳入正轨。
(4)程序口令当程序受到干扰乱飞到非空白段的程序段时,可以采用程序口令技术。具体思路是将程序模块化,每个模块(子程序)执行一个功能,且只有一个出口(RET),再通过一个模块ID寄存器,为每个子程序配置一个唯一的ID号码,每当子程序要返回(RET)之前,先将本子程序的ID号送入ID寄存器,返回到上级程序后,先判断lD寄存器中的ID号。如果正确,则继续执行;如果不正确,则表示PC指针有可能已经跳错,这时使程序复位,回到初始化第一行。
(5)软件冗余在编写程序时,尽可能多采用单字节指令。另外,在程序关键地方以及RET、CALL、BCND、B等指令之前插入2条或3条NOP指令。这样,可以使因受到干扰而乱飞的程序纳入正轨,确保这些重要指令的执行。
(6)数据的保护和恢复在程序编写中,对于因为指令改变结果性质的数据,在每次改变前都尽可能地保护起来,必要时再恢复。
3 结语
本文给出了基于DSP与CPLD数字控制系统的二极管箝位三电平逆变器的系统设计方案,重点分析了系统设计中的电磁兼容问题,并针对这些问题,分别从硬件和软件两方面提出了有效的解决方案。将这些方法用于三电平逆变器系统中,能够有效地抑制电磁干扰,大大提高了系统的稳定性和可靠性。
1)可用耐压较低的器件实现高压输出;
2)与传统两电平逆变器相比,通过电平数的增加,改善了输出电压波形;
3)dv口/df相对较小,从而改善了装置的EMI特性。
因其优越的性能,在高压大功率场合得到了广泛的应用。
在三电平逆变器系统中,承受高压大电流的功率器件的开关过程会产生过高的dv/dt及di/dt,而且系统内部强电信号与弱电信号共存,模拟电路与数字电路共存,接地与PCB布线不当,以及辅助电源的不稳均会在系统内部产生干扰;另外系统供电电网与周围电磁环境的影响也会对系统产生电磁干扰,导致系统无法正常工作,因此做好EMC设计至关重要。
本文给出了基于DSP与CPLD数字控制系统的二极管箝位三电平逆变器的系统设计方案,重点分析了系统设计中的电磁兼容问题,并针对这些问题,分别从硬件和软件两方面提出了有效的解决方案。
1 三电平逆变器系统与工作原理
图1给出了三电平逆变器系统框图,系统由以下几部分组成:主功率电路、基于DSPTMS320LF2407和CPLD XC95144XL的数字控制系统、采样电路、驱动保护电路、辅助电源和PC机。其中,二极管箝位三电平逆变器如图2所示.
每相桥臂采用一对1200V,100A的IGBT模块串联,模块内置续流二极管,采用2200V,100A的二极管模块进行箝位。采样电路对逆变器输出电压、电流和直流母线电压采样,利用DSP内部自带的A/D转换器进行模数转换,并利用软件控制DSP输出PWM信号,在CPLD内部做逻辑和死区处理。驱动保护电路接收来自CPLD的12路PWM信号来驱动IGBT,并在IGBT短路或过流时,将FAULT保护信号送至DSP,封锁PWM信号。
假设图l中直流侧两个电容等容量,且电压相等,均为Vdr/2。则A相桥臂输出电压(以0点为参考点)与开关状态的关系如表1所列,(其中1表示开关接通,O表示开关断开),可见每相均可以输出+Vdr/2,O,一Vdr/2三个电平。
2 系统抗干扰原理与方法
要构成电磁干扰需要满足3个条件:干扰源、噪声耦合途径、被干扰设备。耦合途径包括传导耦合和辐射耦合两种。前面已经指出由于三电平逆变器系统的复杂结构,会受到来自系统外部和系统内部自身的干扰,下面主要讨论系统中的传导耦合,并从硬件和软件两个方面给出有效抗干扰措施。
2.l 硬件抗干扰措施
2.1.1 电源输入端口的抗干扰措施
供电电网输入端口处的干扰主要是传导干扰,包括两方面:一是电网上的干扰通过电源线引入设备,这种干扰可以是来自供电网其他设备产生的传导性干扰,也可以是空间的电磁波在电源线上产生的共模干扰;另一方面主要是由于整流电路本身产生的谐波干扰和电磁噪声,以及由它供电的后级电路产生的电磁噪声以传导耦合形式导入电网,对同一电网内的其他设备产生干扰。
辅助电源均采用高频开关电源,由于采用了PWM技术,所以其开关器件工作在高频通断状态,这种高频的快速通断过程便会产生高频噪声,并在负载上直接传导电磁噪声(共模、差模两种噪声传导方式),严重影响数字控制系统正常工作。
EMI滤波器可以抑制因瞬态噪声或高频噪声措成的干扰.是解决传导干扰十分有效的方法。
通常所用的EMI滤波器结构如图3所示,其中C1。C2是差模电容L1,L2是共模电感,C3、C4、C5、C6是共模电容。
但是,这种EMI滤波器结构自身存在着明显的不足:由于两个差模电容C1,C2自身有寄生电感,所以两个寄生电感之间会产生耦合,而且它们又会与共模电感产生耦合。这样,在高频范围会严重影响EMI滤波器的性能。为此,我们采用了改进的结构,如图4所示。
在改进的EMI滤波器结构中,两个差模电容采用X型连接,这样做的好处是可以大大减小甚至消除电容中寄生电感引起的耦合,极大地改善了EMI滤波器的高频性能。
2 1.2 主功率电路抗干扰措施
1)采用BUSSBAP结构设计 直流母线采用BUSBAR结构设计,即采用铜板或铜条代替导线,使直流母线平行导体化,这样可以降低配线电感,减小因其产生的干扰。同时,对抑制IGBT通断时的浪涌申压和dv/df也有效果。
2)缓冲吸收电路 IGBT通断时产生的dv/df及di/df会对系统的其他部分造成干扰,在大功率应用场合,由于电压、电流等级较高,干扰会更加严重,必须根据实际要求选择吸收电路形式并调整元件参数。
为此采用了图5所示的结构简单的缓冲电路,它充分利用三电平结构的特性,靠外部电容CS1,CS2的充放电来钳制内部IGBT上的电压,使之不突变。Cov1和Cov2吸收主回路杂散电感上的能量,从而钳制过电压,Cov1和Cov2要尽量靠近桥臂侧。吸收电阻月s1及Rs2采用无感电阻,吸收二极管采用快恢复二极管。缓冲电路元件参数选择可按式(1)、式(2)、式(3)选取。
式中:Lp为母线上的杂散电感;
IL为负载电流;
△V为吸收电压峰值;
f为IGBT开关频率。
3)其他抗干扰措施在逆变器输出端连接低通滤波器;IGBT的G、E端子之间接上小容量电容器,降低dv/df及di/dt。
2.1.3 数字控制系统抗干扰措施
本文采用基于DSP和CPLD的数字控制系统,为提高控制系统的准确性和可靠性,从以下几个方面进行电磁兼容设计,提高控制系统的抗干扰能力。
1)辅助电源抗干扰措施数字控制系统输入电源为5V,通过LMll17T转换成的3.3V为DSP和CPLD供电。直流电源的故障主要有输出电压不稳,欠压或掉电。直流电压不稳实质是反复的欠压过程,会直接对数字控制系统产生干扰。为此采用了MC34064电源监视IC电路监视5V直流电源输出电压,图6给出了电路接法。
当电压低于4.59V时,监视电路将产生持续的复位信号使DSP和CPLD处于复位状态,避免其不正常操作带来的事故。当电源输出恢复正常时(>4.6lV),电路经过一个规定的延迟时间后撤消复位信号,保证数字控制系统正常工作,传播延时时间由CDLY确定。
2)光纤抗干扰技术数字控制系统输出的PWM信号,在传输过程中会受到长线传输干扰的影响。其原理如图7所示。干扰幅度可由式(4)确定。
式中:Ur为干扰源;
Ui为干扰电压幅度;
Zs为等效信号源阻抗;
Zo为等效负载阻抗;
Zi为等效干扰源阻抗。
PWM信号在传输过程中,若传输线较长,强电脉冲会通过传输线的分布电容和分布电感对PWM信号产生干扰。如果信号受到干扰或延时太大,则主电路中IGBT就无法正确地开通或关断,有可能会造成短路而榻坏器件。
为此,本文在数字控制系统与驱动电路之间采用光纤连接。图8给出了采用光纤接收和发射的连接方式。
光纤连接的发射和接收之间没有直接的电气连接,能够精确传送PWM控制信号,不仅解决了功率电路和控制电路之间的强弱电隔离,抗电磁干扰问题,而且能够实现驱动信号的远距离传送,延时小。
3)PCB抗干扰措施
(1)采用电源平面和地平面 由于数字控制系统是高频和高速的数字脉冲电路,所以它们的信号接地系统必须具有极低的地阻抗,电路中所有元件接到参考地的引线电感尽可能小,另外为了减小电源瞬态噪声电压,要减小电源线的引线电感。所以,本文的数字控制系统采用四层板结构,中间两层为单独的电源层和地层,可以大大减小因公共阻抗耦合产生的传导干扰。
(2)去耦滤波抗干扰配置去耦电容可以抑制因负载变化而产生的噪声,具体做法是:在电源输入端要跨接电解电容;在数字集成电路芯片的VCC和GND之间用高频低电感的陶瓷电容进行去耦滤波,去耦电容供电回路的面积越小越好,越接近芯片越好,去耦电容引线越短越好。
(3)数字与模拟电路的处理数字控制系统中既有模拟电路又有数字电路,要把它们尽量分开,并且将模拟电路的地和数字电路的地分开,最后再接到一起,在共接点选用合适的电感,将数字电路中的最强干扰隔离掉,接法如图9所示。
另外,集成数字电路芯片没有用到的管脚不要浮空,应该接到GND或VCC,防止不必要的开关转换和噪声产生。
2.1.4 驱动保护电路抗干扰措施
本文采用Powerx公司的集成驱动模块M57962L,在抗干扰方面,它有以下优点:
1)内部具有高速光耦,将驱动脉冲信号与驱动电路内部隔离,这样控制电路与驱动电路实现了电气隔离,防止因电气耦合产生的干扰;
2)栅极驱动采用双极性控制电压,使用负的栅极电压可以获得较高的抗干扰性,图lO是采用光纤传送的驱动电路示意图。
此外,我们采用了以下抗干扰措施。
1)将门极驱动电阻扩大到样本中记载的标准值的2~3倍,这样可以使交换时间变长,从而使IGBT的dv/dt及di/dt降低。
2)为了抑制主功率电路对驱动电路的干扰,需要对驱动电路的元件合理布局,如图ll所示。
(1)S1和S3相邻,S2和S4相邻,两组之间保持适当的距离。
(2)驱动保护电路与IGBT模块之间选用阻抗高、抗共模干扰能力强的双绞线,引线尽可能短,以减小寄生电感,两线间互绞越密效果越好。
3)每个lCBT触发电路均采用通过变压器隔离的相互独立的电源供电,以避免电磁噪声通过公共阻抗耦合对彼此产生干扰。
2.2 软件抗干扰措施
除了以上采用的硬件抗干扰措施外,充分利用软件抗干扰的能力能够最大程度地抑制干扰。软件抗干扰主要包括以下两方面:
1)消除模拟输入信号的噪声干扰;
2)在数字控制系统受到干扰、程序跑飞时,使程序复位,能够重新正常工作针对上面两种情况,采取了以下抗干扰措施。
(1)数字滤波可以有效地消除模拟输入信号的噪声,从而抑制于扰。常用方法包括限幅滤波、中值滤波、算术平均滤波、加权平均滤波等。
(2)设置看门狗 当DSP受到干扰引起程序乱飞,使程序进入“死循环”时,通过中断服务程序,使程序回到初始化的第一行。
(3)软件陷阱DSPTMS320LF2407有多达64K的程序存储空间。通常在使用时会有大量未用的空间。在这些区域设置一段引导程序,当程序受到干扰跳到该区域时,引导程序将会强行指向专门对程序出错进行处理的程序段地址,从而使程序重新纳入正轨。
(4)程序口令当程序受到干扰乱飞到非空白段的程序段时,可以采用程序口令技术。具体思路是将程序模块化,每个模块(子程序)执行一个功能,且只有一个出口(RET),再通过一个模块ID寄存器,为每个子程序配置一个唯一的ID号码,每当子程序要返回(RET)之前,先将本子程序的ID号送入ID寄存器,返回到上级程序后,先判断lD寄存器中的ID号。如果正确,则继续执行;如果不正确,则表示PC指针有可能已经跳错,这时使程序复位,回到初始化第一行。
(5)软件冗余在编写程序时,尽可能多采用单字节指令。另外,在程序关键地方以及RET、CALL、BCND、B等指令之前插入2条或3条NOP指令。这样,可以使因受到干扰而乱飞的程序纳入正轨,确保这些重要指令的执行。
(6)数据的保护和恢复在程序编写中,对于因为指令改变结果性质的数据,在每次改变前都尽可能地保护起来,必要时再恢复。
3 结语
本文给出了基于DSP与CPLD数字控制系统的二极管箝位三电平逆变器的系统设计方案,重点分析了系统设计中的电磁兼容问题,并针对这些问题,分别从硬件和软件两方面提出了有效的解决方案。将这些方法用于三电平逆变器系统中,能够有效地抑制电磁干扰,大大提高了系统的稳定性和可靠性。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
