- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于ARM 的高分辨率压电陶瓷驱动电源设计方案(一)
录入:edatop.com 点击:
0 引言
压电陶瓷驱动器(PZT)是微位移平台的核心,其主要原理是利用压电陶瓷的逆压电效应产生形变,从而驱动执行元件发生微位移。压电陶瓷驱动器具有分辨率高、响应频率快、推力大和体积小等优点,在航空航天、机器人、微机电系统、精密加工以及生物工程等领域中得到了广泛的应用。然而压电陶瓷驱动器的应用离不开性能良好的压电陶瓷驱动电源。要实现纳米级定位的应用,压电陶瓷驱动电源的输出电压需要在一定范围内连续可调,同时电压分辨率需要达到毫伏级。因此压电陶瓷驱动电源技术已成为压电微位移平台中的关键技术。
1 压电驱动电源的系统结构
1.1 压电驱动电源的分类
随着压电陶瓷微位移定位技术的发展,各种专用于压电陶瓷微位移机构的驱动电源应运而生。目前驱动电源的形式主要有电荷控制式和直流放大式两种。电荷控制式驱动电源存在零点漂移,低频特性差的特点限制其应用。而直流放大式驱动电源具有静态性能好、集成度高、结构简单等特点,因而本文的设计原理采用直流放大式压电驱动电源。直流放大式电源的原理如图1所示。
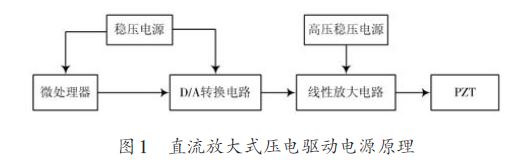
1.2 直流放大式压电驱动电源的系统结构
驱动电源电路主要由微处理器、D/A转换电路和线性放大电路组成。通过微处理器控制D/A产生高精度、连续可调的直流电压(0~10 V),通过放大电路对D/A输出的直流电压做线性放大和功率放大从而控制PZT驱动精密定位平台。
该设计中采用LPC2131作为微处理器,用于产生控制信号及波形;采用18位电压输出DA芯片AD5781作为D/A转换电路的主芯片,产生连续可调的直流低压信号;采用APEX公司的功率放大器PA78 作为功率放大器件,输出0~100 V 的高压信号从而驱动PZT.为实现高分辨率压电驱动器的应用,压电驱动电源分辨率的设计指标达到1 mV量级。
2 基于ARM 的低压电路设计
2.1 ARM控制器简介
压电陶瓷驱动电源中ARM控制器主要提供两方面功能:作为通信设备提供通用的输入/输出接口;作为控制器运行相关控制算法以及产生控制信号或波形实现PZT的静态定位操作。针对如上需求,本设计采用LPC2131作为主控制器,LPC2131是Philips公司生产的基于支持实时仿真和跟踪的32 位ARM7TDMI-S-CPU的微控制器,主频可达到60 MHz;LPC2131内部具有8 KB片内静态RAM和32 KB嵌入的高速FLASH存储器;具有两个通用UART接口、I2C接口和一个SPI接口。由于LPC2131具有较高的数据处理能力和丰富的接口资源使其能够作为压电驱动电源的控制芯片。
2.2 D/A电路设计
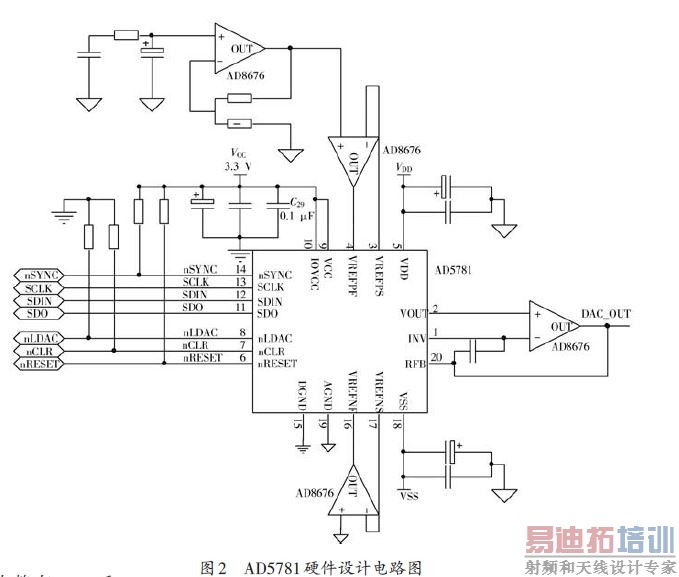
由于压电驱动电源要求输出电压范围为0~100 V,分辨率达到毫伏级,所以D/A的分辨率需达到亚毫伏级。本设计采用AD5781作为D/A器件。AD5781是一款SPI接口的18位高精度转换器,输出电压范围-10~10 V,提供±0.5 LSB INL,±0.5 LSB DNL和7.5 nV/ Hz噪声频谱密度。另外,AD5781 还具有极低的温漂(0.05 ppm/℃)特性。因此,该D/A转换器芯片特别适合于精密模拟数据的获取与控制。D/A 电路设计如图2 所示。
在硬件电路设计中,由于AD5781 采用的精密架构,要求强制检测缓冲其电压基准输入,确保达到规定的线性度。因此选择用于缓冲基准输入的放大器应具有低噪声、低温漂和低输入偏置电流特性。这里选用AD8676,AD8676 是一款超精密、36 V、2.8 nV/ Hz 双通道运算放大器,具有0.6 μV/℃低失调漂移和2 nA输入偏置电流,因而能为AD5781提供精密电压基准。通过下拉电阻将AD5781的CLR和LDAC引脚电平拉低,用于设置AD5781为DAC二进制寄存器编码格式和配置输出在SYNC的上升沿更新。
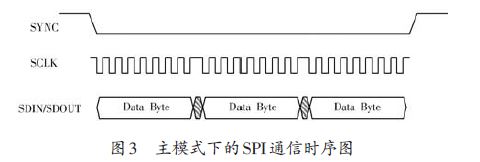
在ARM端的软件设计中,除正确配置AD5781的相关寄存器外,还应正确配置SPI的时钟相位、时钟极性和通信模式。正确的SPI接口时序配置图如图3所示。
3 高压线性放大电路设计
本文压电驱动电源采用直流放大原理,通过高压线性放大电路得到0~100 V连续可调的直流电压驱动压电陶瓷。放大电路决定着电源输出电压的分辨率和线性度,是整个电源的关键。
3.1 经典线性放大电路设计
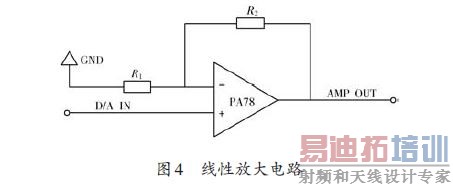
放大电路采用美国APEX公司生产的高压运算放大器PA78作为主芯片。PA78的输入失调电压为8 mV,温漂-63 V/°C,转换速率350 V/μs,输入阻抗108 Ω,输出阻抗44 Ω,共模抑制比118 dB.基于PA78的线性放大电路设计如图4所示。配置PA78为正向放大器,放大倍数为Gain=1+ R2 R1 ,得到输出电压范围为0~100 V.
如果运放两个输入端上的电压均为0 V,则输出端电压也应该等于0 V.但事实上,由于放大器制造工艺的原因,不可避免地造成同相和反相输入端的不匹配,使输出端总有一些电压,该电压称为失调电压。失调电压随着温度的变化而改变,这种现象被称为温度漂移(温漂),温漂的大小随时间而变化。PA78的失调电压和温漂分别为8 mV、-63 V/°C,并且失调电压和温漂都是随机的,使PA78无法应用于毫伏级分辨率的电压输出,需要对放大电路进行改进。
 [p]
[p]
3.2 放大电路的改进
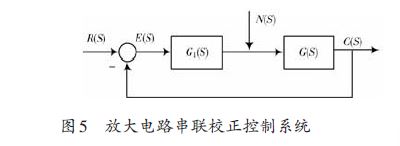
这里将PA78视为被控对象G(S),将失调电压和温漂视为扰动N(S),这样就把提高放大器输出电压精度转化成减小控制系统的稳态误差的控制器设计的问题。在控制器的设计中常用的校正方法有串联校正和反馈校正两种。一般来说反馈校正所需的元件数少、电路简单。但是在高压放大电路中,反馈信号是由PA78的输出级提供。反馈信号的功率较高,为元件选型和电路设计带来不便,故线性放大电路中不使用反馈校正法。而在串联校正方法中,有源器件的输入不包含高压反馈信号,所以该设计采用串联校正方法,采用模拟PI(比例-积分)控制器G1(S)进行校正,如图5 所示。
成比例的反应输入信号e(t)及其积分,即:
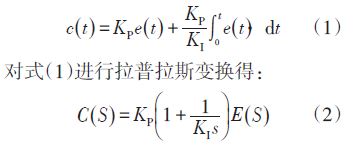
由式(2)观察可得,PI控制器相当于在控制系统中增加了一个位于原点的开环极点,开环极点的存在可以提高系统的型别,由于系统的型别的提高可以减小系统的阶跃扰动稳态误差(对于线性放大电路,可视失调电压和温漂为阶跃扰动)。同时PI控制器还增加了一个位于复平面中左半平面的开环零点,复实零点的增加可以提高系统的阻尼程度,从而改善系统的动态性能,缓解由牺牲的动态性能换取稳态性能对系统产生的不利影响。
放大电路的设计中采用有源模拟PI控制器,改进后的线性放大电路如图6所示。其中PI控制器的放大器采用AD8676,AD8676的输入失调电压低于50 μV(满温度行程下),电压噪声≤0.04 μV(P-P)@0.1~10 Hz,因此适合用于串联校正环节,以提高系统稳态性能、减小输出电压漂移。
3.3 相位补偿
从工程角度考虑,由于干扰源的存在,会使系统的稳定性发生变化,导致系统发生震荡。因此保证控制系统具有一定的抗干扰性的方法是使系统具有一定的稳定裕度即相角裕度。
由于实际电路中存在杂散电容,其中放大器反向输入端的对地电容对系统的稳定性有较大的影响。如图6所示,采用C5和C6补偿反向端的杂散电容。从系统函数的角度看,即构成超前校正,增加开环系统的开环截止频率,从事增加系统带宽提高响应速度。
PA78有两对相位补偿引脚,通过外部的RC网络对放大器内部的零极点进行补偿。通过PA78的数据表可知,PA78内部的零极点位于高频段。根据控制系统抗噪声能力的需求,配置RC网络使高频段的幅值特性曲线迅速衰减,从而提高系统的抗干扰能力。图6中,R4,C1与R5,C2构成RC补偿网络。
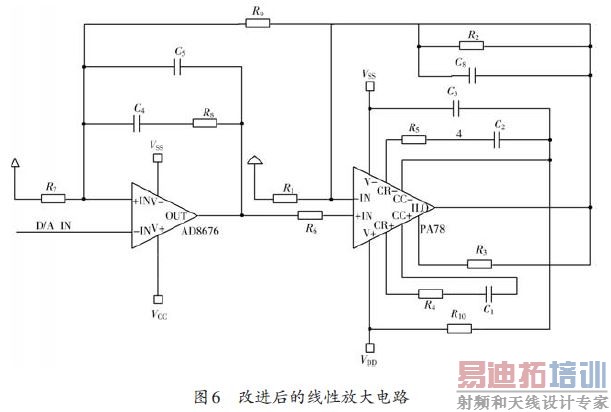
此外电路中C3的作用是防止输出信号下降沿的振动引起的干扰;R10起到偏置电阻的作用,将电源电流注入到放大器的输出级,提高PA78的驱动能力。
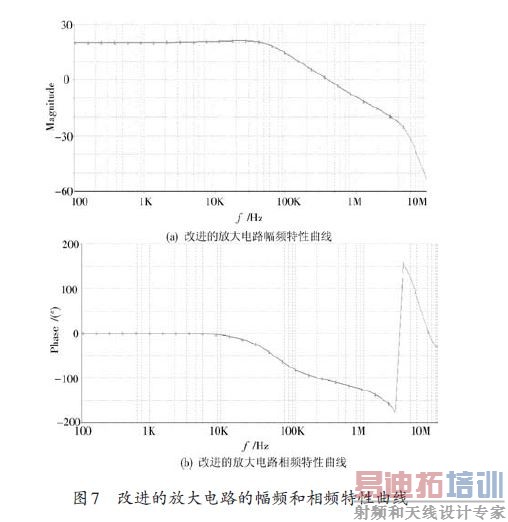
将PI控制器的参数分别设置为KP=10、KI=0.02;超前校正补偿电容分别为12 pF和220 pF;RC补偿网络为R=10 kΩ、C=22 pF.利用线性放大电路的Spice模型进行仿真得到幅频特性和相频特性曲线如图7所示。从图中观察可得,放大系统的带宽可达100 kHz,从而保证了系统良好的动态特性,同时相角裕度γ>60°使系统具有较高的稳定性(由于PZT的负载电抗特性一般呈容性,所以留有较大的相角裕度十分必要)。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
