- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于24V电源的双环电流型PWM控制器的设计方案
录入:edatop.com 点击:
0 引言
电压型PWM是指控制器按反馈电压来调节输出脉宽,而电流型PWM是指控制器按反馈电流来调节输出脉宽。电流型PWM是在脉宽比较器的输入端,直接用流过输出电感线圈电流的信号与误差放大器输出信号进行比较,从而调节占空比,使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环、电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型PWM控制器。
1 双环电流型PWM控制器工作原理
双环24V电源电流型脉宽调制( PWM) 控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。双环电流型PWM控制器电路原理如图1 所示。
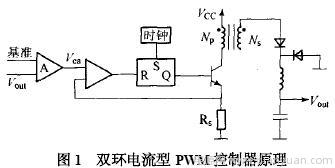
从图1 可以看出,24V电源电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感) 中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟,Vea上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vea ,使PWM占空比加大,起到调整输出电压的作用。由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
2 双环电流型PWM控制器的特点
a) 由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01 %/V,能够与线性移压器相比。
b) 由于24V电源双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c) 由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1 V, PWM控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d) 误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
e) 由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。
3 双环电流型PWM控制器功率因数校正
正是基于以上特点,电流型PWM 控制器在实际应用中被越来越广泛地采用。对它采用功率因数校正技术,可以有效地减少高次谐波对电网的干扰,减小功耗,具有较大的实际意义。
3.1功率因数校正方法
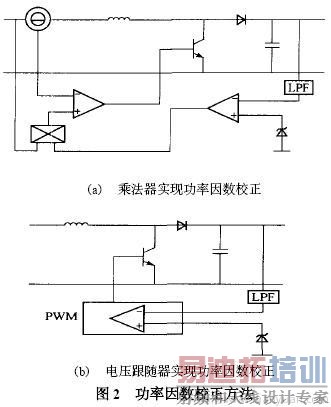
功率因数校正主要有两种方法:一种是将电网上公用负载端并接一个专用的功率变换器,对无功和谐波进行补偿;另一种是将负载的整流电路与滤波电容之间增加一个功率变换电路,将输入电流校正成与电网电压相近的正弦波。实现功率因数校正在CCM 和DCM下可采用乘法器和电压跟随器实现,框图如图2所示。
3.2电流型PWM控制器功率因数校正方法
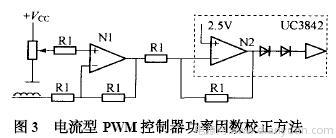
由于乘法器的价格昂贵,改用加法电路来实现乘法器的功能。为了使电感电流的包络为正弦,必须使电流检测比较器反相输入端的输入电压为正弦馒头波,基本电路如图3 所示。
 [p]
[p]
当N1 负端加上电整流取样而得到正弦馒头波时,经二极管降压及电阻分压,加到电流感应比较器负端信号为1/3 的正弦馒头波,从而使电感电流的包络正弦化。当然,在实际使用中还需要进行闭环控制,才能够得到稳定的输出电压。
3 电流型PWM控制器斜坡补偿方法
3.1峰值电流与平均输出电感电流
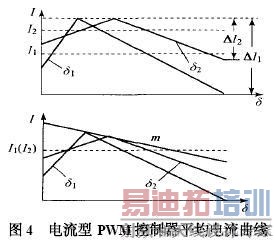
由于24V电源功率开关管的峰值电流由PWM 控制器保持恒定控制,也就是说,电感的峰值电流也保持恒定,但直流输出电压正比于输出电流平均值而不是峰值电流,当输入电压减小时,为了使电流恒定,占空比将调节为δ2,这时平均电流将上升为I2,输出电压也将上升。在电压型控制器中将不会出现这种问题,但在电压型控制器件下,仅有输出电压得到控制。因此,为了解决以上问题,在电流型控制器中需采用斜坡补偿加以解决。为了维持一个恒定的平均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当( Ns/Np ) Rs ( m2/2) = m 成立时,输出电感平均电流与Ton无关,则保持了输出电压恒定。如图4 所示。
3.2斜坡补偿的实现
斜坡补偿可以用图5 所示电路来实现。一般R1的阻值预先设定,再计算R2 的阻值,很重要的一点是R2 的阻值应足够高,以避免使振荡器产生振荡频率漂移。
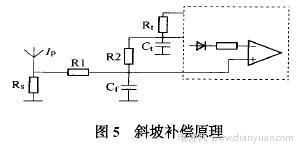
从斜坡端接电阻R2 至电流感应端,这时Rs 上的感应电压增加斜坡的斜率与平滑的误差电压进行比较,这在占空比达到50 %以上时非常有效。R2 阻值的一般计算步骤如下:
a ) 计算次级电感下斜坡: S1 = di/dt ( 单位为A/μs) ;
b) 计算初级电感下斜坡: S2 = S1 Ns/Np (单位为A/μs) ;
c) 计算检测电阻上的斜坡电压: V1 = S2 Rs (单位为V/μs) ;
d) 计算定时电容器CT 上的振荡器斜坡电压: S =dVosc/Ton (单位为V/μs) ;
e) 若令斜坡补偿量M = 0.75 ,R1 的阻值R1 设为1 kΩ ,则R2 = R1 ( Vs/VS2 ) M.
4 结束语
随着24V电源电流型PWM 控制器被越来越广泛地应用,正确掌握使用方法可以节约大量设计时间,并能取得较好的设计效果,因而是使用这一类控制器必须注意的问题。而本文针对电压型脉宽调制器(PWM)控制器只有电压控制环、电流变化滞后电压变化、系统响应速度慢、稳定性差等固有缺点,提出了一种基于24V电源的双环电流型PWM控制器的设计方案。该方案由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:如何采用COT稳压器动态控制输出电压
下一篇:开关电源纹波来源及控制
射频和天线工程师培训课程详情>>
