- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于MSP430的自动避让小车的设计与实现
录入:edatop.com 点击:
摘要:设计了一个基于MSP430F149单片机自动避让小车控制系统,系统由两个带有无线通讯模块、电机驱动模块、循迹模块以及超声波测距模块的小车组成。通过无线通讯模块、超声波模块以及利用红外遁迹模块来确保两车在规定的车道里的行驶和相互避让,并且采用了模糊算法来实时响应小车循迹模块信号,从而保证了小车快速向前行驶,而且不超出边界。
关键词:MSP430;nRF905;超声波测距;红外遁迹;模糊控制
0 引言
机器人竞赛是近些年国际上开展的一项高科技活动,它集高新技术、娱乐和竞赛于一体,受到众多学者的广泛关注和极大兴趣。机器人小车子系统其性能和运动时的避让控制是自动控制系统中重要的处理技术之一,也是整个系统中至关重要的部分。本文设计了一个基于低功耗单片机MSP430F149的智能自动避让小车控制系统,系统由两个基本相同的小车为主要载体,搭配对应的无线通讯模块、电机驱动模块、循迹模块以及超声波测距模块。系统控制方案主要通过nrf905无线通信模块来实现甲,乙两小车的呼叫、应答信号。通过超声波模块来确定甲乙两小车的相互位置关系。利用红外遁迹模块来确保两小车在规定的车道里面行驶以及即时确定小车已经到达的位置来调整小车自身车位。设计方法上主要是通过光栅计数匹配来实现小车的精确直线行驶,通过左右车轮反转的方式来实现小车小范围内快速精确转向,以及可调占
空比控制小车无级变速,并且采用了模糊算法来实时响应小车循迹模块信号,从而保证了小车快速向前行驶,而且不超出边界。
1 总体方案设计与比较
方案一:精确控制甲乙两车的行走距离和转弯角度,不用其它的循迹或通信等模块对小车的轨迹进行修正,仅按照要求对小车路径进行模拟。
方案二:在方案一的基础上加入nRF905无线通信模块,后面的小车通过无线通信跟随前面的小车,避免两车相撞,前面的小车需要在程序员设定的路径下精确行驶。
方案三:在方案二的基础上加入循迹和超声波模块,充分利用车道的边沿和起点、终点、转向等标志线,来精确定位小车,同时利用超声波模块来探测甲乙两车的相对距离,确保小车不撞车。
论证:通过上述三种方案的测试与比较,方案一硬件和编程算法相对比较简单但是实践起来繁琐且适应能力差。方案二中使用无线通信模块来控制整个过程,适应能力有所提高,但仍然无法全面地满足题目要求。方案三加入了多种反馈模块,对外界信息采集能力强,能较为全面地完成题目要求。权衡利弊,选择方案三。
2 理论分析与计算
2.1 信号检测与控制
(1)红外循迹模块。本系统采用3.3V红外对管,利用木板和黑胶带对红外光的不同反射特性来(木板反光,黑胶带吸光)获得循迹信号,再经过放大器LM358组成的电压比较器来获得对应的高低电平信号送给430单片机检测。
(2)超声波测距模块。本系统采用HC-SR04的超声波模块,由单片机产生一个大于10 μs的高电平触发模块进行测距,利用超声波信号的发送与接收时间差来计算距离。
(3)小车精确控制。通过光栅编码器返回的数据对电机进行反馈调节,利甩PWM波的占空比实现电机调速,从而保证小车精确运动。
2.1 两车之间的通信方式
系统主要是利用nRF905无线模块来进行通信,利用车道已有的转弯标志和超车标志线,在对应的位置通过红外循迹模块获得信号之后,利用nRF905无线模块把信息发给另外一辆小车。通过这种信息的交流来调节两辆小车的位置,确定下一阶段的行驶方式。
2.2 节能方式
系统采用了德州仪器公司的低功耗单片机MSP430F149,内部功能模块多、资源丰富,最为突出的是此单片机采用3.3V供电,有掉电、待机模式,这使得其在功耗方面有极大的减少。在低功耗、小型控制系统中有着突出的优势和应用市场。
此外小车在正常工作过程中,并不完全启动各个模块,只有得到相应的触发信号之后,该模块才会被启动,从而降低各个模块的功耗。另外nRF905无线模块可以设置空闲模式或关机模式,关机模式时nRF905工作电流最小只有25 μA;空闲模式下nRF905模块只有部分晶体振荡器工作,有利于减小工作电流。
3 硬件电路设计
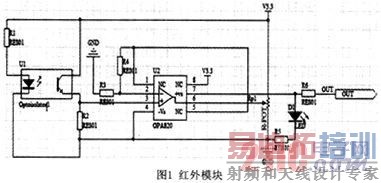
3.1 红外循迹模块电路
主要有一对3.3V供电的红外对管和一个LM358运算放大器组成。接收管的输出信号输入由LM358组成的电压比较器电路,当红外光线反射回来时为高电平,否则为低电平,具体电路如图1所示。
[p]
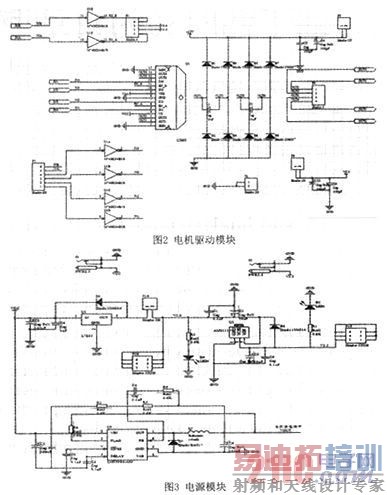
3.2 电机驱动模块电路
L298的12个H桥下侧桥晶体管的发射极连在一起,之后通过控制IN1、IN2,当IN1高电平,IN2低电平,使能端ENA输入PWM波时电机正转,反之电机反转,通过改变PWM占空比改变转速。L298构成的电机驱动电路如图2所示。
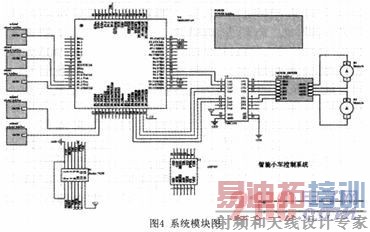
3.3 电源模块
整个系统由一个左右的6800mAh/12.8V的锂电池供电,主要分为两个分支往下一级模块供电,一路是经过L7805稳压到5V给电机驱动模块L298N的输入级供电。再经过lm1117稳压为3.3V给MSP430最小系统、红外循迹、nRF无线模块供电。另外一路则通过由LM2598组成电压可调DC-DC模块给L298N的输出级供电来驱动电机,如图3所示。
3.4 系统控制示意图
4 软件设计
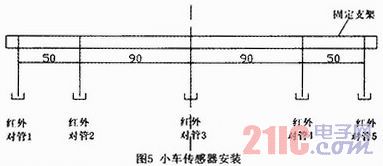
传感器安装如图5所示,安放在小车头部,该尺寸设计是经过大量的实验与计算总结得出的。内侧的两个传感器与中间的间距9cm,正好小于超车道区域的虚线,便于识别超车区外侧的两个传感器与内侧的间距5cm,该距离便于边界线的检测。
[p]
弯道矫正原理图如图6所示,通过转弯标志线进行自我定位,在转弯过程中进行方向矫正。
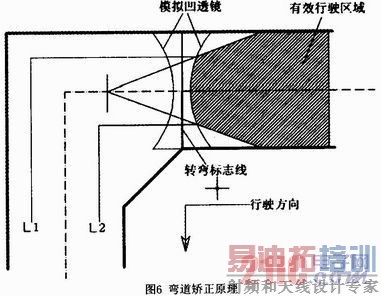
通过软件实现模拟凹透镜散射原理,将不平行于行驶轴线方向的小车进行矫正,图中在有效行驶区域内部的小车都能矫正到直线L1与直线L2之间,理论上与轴线平行。经过实验得出,该方案对偏转角度在正负30°以内的小车矫正效果较为明显。在直线行驶区域内,通过边界线的反馈保证小车不超出边界且在有效行驶区域内进入弯道。
5 测试方法及测试结果
5.1 测试仪器
秒表、卷尺
5.2 测试环境和方法
实验室、单个任务多次测量

5.3 测试结果分析
经过现场测试,甲乙两车速度特性基本一致,交替领跑有速度加快的趋势,系统在交替领跑过程中趋于稳定,并未放大误差。
6 结论
本系统从方案制定,到系统硬件搭建以及算法的采用上都进行了精心设计和论证。测试结果表明自动避让小车控制系统反映速度快、运行稳定,避让及时。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
