- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于MSP430F149单片机的车体调平装置设计
录入:edatop.com 点击:
随着国防技术的发展,根据任务需求,越来越多的军用武器需要随时变更工作地点。为了保证这些军用武器的机动性能,往往以载车为运输载体,如火箭炮这样的大型武器就被安装在载车上。载车到达目的地后,借助平台快速将武器架设调至水平而后工作,工作完成后平台能够快速地撤收、转移。既保证了武器的工作性能,又提高了机动性。
传统上,主要依靠人工手动完成平台的水平度调节,这需要一部分人员手动调节千斤顶,另外一部分人员观察水平仪的水泡位置。这种调平方式费时费力,且精度低、抗倾覆能力差。随着调平时间和调平精度要求的提高,过去的调平方式已远远不能满足实际情况的需要,所需时间短、精度高、抗倾覆能力强的自动调平控制技术应运而生。
在军用方面,自动调平控制系统广泛应用于机动发射装置、导弹车、坦克火控调试台等装备。以火箭炮为例,火箭炮被大量使用在高科技战争中,为了提高其生存能力,对其机动性能也提出了更高的要求。制约火箭炮机动性的主要因素是火箭炮进入阵地后,进行架设并调整到水平状态的时间。自动调平装置是消除这一制约因素的关键设备。随着电子元器件和自动控制技术的发展,自动调平装置采用了许多新器件、新方法,使得调平时间和调平精度严格符合战场要求。
设计火箭炮车体调平装置的目的是使火箭炮在停车工作时其载车能够迅速架设,实现武器系统平台倾斜度的快速测量、计算和无线数传,使其快速精确地达到水平,即在保证火箭炮工作性能的条件下最大程度的提高系统的机动性。
自动调平系统发展趋势概述
目前,调平技术都已逐步成熟,但随着武器机动性要求的不断提高,也相应提高了对调平时间和调平精度的要求,与之相适应的自动控制调平技术也不断发展。自动调平系统的发展方向主要是:
(1)精确性:系统的精确性主要取决于倾角传感器的分辨率。随着新结构、新材料、新工艺和新技术在高精度倾角传感器中的应用,倾角传感器的性能大幅度地提高了,倾角传感器正从传统的液体摆、气体摆原理向伺服加速度及力平衡、重力摆原理发展,倾角传感器的分辨率已达到0.001度或更高。
(2)稳定性:为了适应现代武器高机动性和快速反应能力的需求,要求车载平台有更高的稳定性,采用机电伺服系统代替电液伺服系统,加上单片机系统可靠性与抗干扰技术的不断发展,奠定了单片机系统稳定可靠工作的基础。尤其是计算机与传感器技术的发展,使高稳定性的调平系统得以实现。
(3)快速性:目前,倾角传感器的响应速度已显著提高,新型倾角传感器响应时间达到了5毫秒,响应速度为200次/秒,再加上在系统中应用先进控制算法,都使得调平系统的调平时间大大缩短了,也就提高了武器系统的快速性。
(4)可操作性:在自动调平系统中设计有人机交互显示面板,通过其图形界面显示系统的状态及各种实时参数,并根据工作需要对系统进行参数设置。面板设置有多个功能键,可根据需要自由定义,实现调平系统的各种操作。这些都将使系统的可操作性得到大大提高。
车体调平装置总体设计
火箭炮车体调平装置总体设计包括:倾角传感器的选型、数据处理与无线数传电路设计。车体调平装置机壳采用铝合金整体加工,内置倾角传感器、电路板、电池和无线发射模块等,水平检查座与机壳由螺钉固连,采用优质合金钢,表面光洁度和水平度优于水准仪标准,发射机天线位于机壳的上方,使用时旋拧上,装箱时可以折叠放倒或旋拧下。车体调平装置控制原理如图1所示。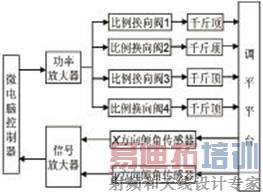
图1 车体调平装置控制原理图
倾角传感器及传感器包数据输出格式
倾角传感器选型
倾角传感器用于感应火箭炮车体的纵横向倾斜度,基本技术要求:①精度高于±0.012°;②使用环境温度为﹣40℃~﹢55℃。根据这些要求,选用北京星网宇达科技公司的TW-TS1110倾角传感器。该传感器内部采用高速数字处理器,对多维重力加速度信息进行处理与姿态角解算,并采用角度数字输出模式,输出速度为5Hz,测量范围为±15°。测量精度:当倾角≤±5°时,精度为±0.005°;当倾角≤±15°时,精度为±0.01°;当倾角≤±30°时,精度为±0.035°。传感器利用光刻电阻技术补偿非线性误差,解决了传统倾角传感器只有在小范围才能保证精度的现象,使得倾角传感器在全测量范围内线性化,保持同一额定精度指标。传感器还采用启动零位测试补偿技术,具有快速稳定输出能力,单点重复性为0.0015°;采用动态数字滤波技术,输出噪声低,且具有较高的分辨率,分辨率为0.002°,传感器内部采用动态零位与标度因数自校正技术。适合多种环境使用,使用环境温度为﹣40℃~﹢55℃。
传感器包数据输出格式
1 发送数据格式定义
①ASCII码发送格式(单角度):24 FF XX XX XX XX XX 0D 0A
说明——24:头标识$;FF:角度值的符号位(+2b/-2d);XX:ASCII码角度值(30~39);0D 0A:角度发送字尾标识符(换行,回车)。
②二进制码发送格式(单角度):AA XX XX CC
AA:角度发送字头标识符;XX:带符号二进制数。5度倾角标度:6000bit/度;15度倾角标度:2000bit/度;30度倾角标度:1000bit/度;60度倾角标度:500bit/度。
CC:校验码;CC=数据字节1+数据字节2。
2 接受命令格式定义
读角度命令格式如图2所示。该命令仅在应答工作模式下有效。每个传感器都有固定ID字(FFFF)和用户ID字(用户可设定,初始为0000),2个ID字都可读角度。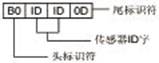
图2 读角度命令格式
数据处理与无线数传电路设计
无线数传系统是无线数字传输系统的简称,该系统以无线数传模块为平台,在不影响装备功能情况下,实现数字终端之间数字信息的无线传输。数据处理与无线数传的主要任务是接收倾角传感器的数据输出,计算每个千斤顶相对车体水平面所要调整的角度,并通过无线数传模块传输给操纵指示器。
MSP430F149单片机简介
单片机具有可靠性高、功耗低、扩展灵活、体积小、价格低和使用方便等优点,广泛应用于仪器仪表、专用设备智能化管理及过程控制等领域,有效地提高了控制质量与经济效益。本设计选用TI公司的16位超低功耗混合型微处理器MSP430F149(见图3)作为核心控制器,它的主要特点是:
(1)低电压、超低功耗
该单片机的电源电压采用1.8V~3.6V低电压,RAM数据保持方式下耗电仅0.1μA,在2.2V、1MHz主频的活动模式时工作电流为280μA,I/O输入端口的漏电流最大仅50nA。
(2)强大的处理能力
该单片机为16位的精简指令集(RISC)结构,具有丰富的寻址方式(7种源操作数寻址、4种目的操作数寻址)、简洁的27条内核指令以及大量的模拟指令;大量的寄存器以及片内数据存储器都可参加多种运算,还有高效的查表处理方法及较高的处理速度,一个时钟周期可以执行一条指令,使单片机在8MHz晶振工作时,指令速度可达8MIPS。
(3)丰富的片上外围模块
该单片机集成了较丰富的片内外设:模拟比较器A、定时器A、定时器B、串行通信接口USART0和USART1、硬件乘法器、12位ADC、端口1~6、看门狗等。
(4)系统工作稳定
该单片机在上电复位后,首先由DCOCLK启动CPU,保证程序从正确的位置开始执行,同时也保证了晶体振荡器有足够的起振和稳定时间;之后通过软件可设置适当的寄存器的控制位来确定最后的系统时钟频率。在CPU运行中,如果MCLK发生故障,DCO会自动启动,以确保系统正常工作。如果程序跑飞,可以用看门狗将其复位。
(5)方便高效的开发环境
MSP430F149片内有JTAG调试接口,还有可电擦写的FLASH存储器,因此采用先通过JTAG接口下载程序到FLASH内,再由JTAG接口控制程序运行、读取片内CPU状态,以及存储器内容等信息供设计者调试。由于单片机可支持串行在线编程,使开发变得更加简便,并且开发的仿真器价格低廉,不需要昂贵的编程器。
无线数传电路的设计
数据处理与无线数传电路设计主要包括主控制器电路、倾角传感器接口电路、无线数传模块接口电路、电源电路等。基本工作原理是:系统通上电后,主控制器控制倾角传感器按固定间隔检测火箭炮车体姿态,将接收到的检测结果运算处理,计算每个千斤顶的调整量,再通过无线数传模块发送给操纵指示器。
(1)主控制器及接口电路设计
主控器采用MSP430F149单片机,串口1经TTL-RS232电平转换接倾角传感器,用于接收传感器输出数据,串口2 TTL电平接无线数传模块,发送车体纵横向倾斜角度和调整角度至操纵指示器。主控制器及接口电路如图3所示。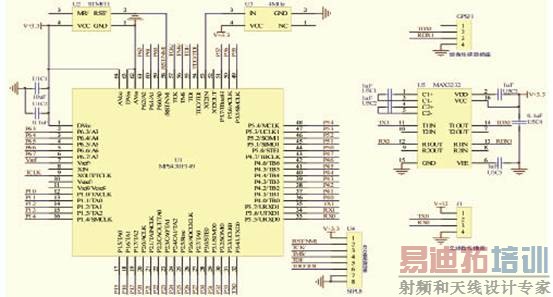
图3 主控器及接口电路图
(2)电源电路设计
电源采用12V/1000mAh的锂电池,直接为倾角传感器供电,再经两路DC-DC转换,分别转换至9V和3.3V,9V电源为无线数传模块供电,3.3V为主控制器及接口电路供电,充电电路采用LM317芯片,恒流方式充电。电源电路见图4所示。
(3)无线数传模块的选用
在一些多测试点的系统中,伴随传感器而来的是大量数据线缆。众多的线缆不仅带来布线的复杂不便,而且存在着短路、短线隐患,成本高,易老化,还给系统的调试和维护增加了难度。另外,在一些特殊的应用场合,需要将传感器放置在有危险的封闭环境中进行工作,试图通过连线的方法得到传感器的信号显然是有一定难度的。而采用无线方式来实现信号的传送,可以解决这一问题。相比有线传输,无线传输具有不占据空间、没有布线要求、成本低、可靠性高、维护方便及传输中的干扰较少等优点,这也在一定程度上提高了传输的可靠性。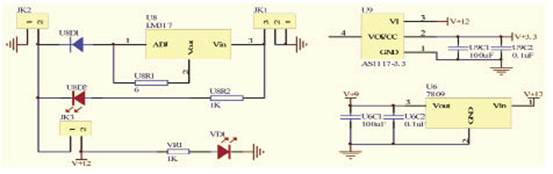
图4 电源电路图
根据实际情况,本文采用ZT-TR43F无线数传模块,它是一款无线收发一体的低功耗通信模块。该模块的技术指标如下:①载波频率为433MHz,工作频率为428MHz~435MHz;②最大发射功率5mW,接收灵敏度﹣105dBm;③采用FSK调制,采用前向信道纠错编码,抗干扰能力强;④有八个工作信道可供选择;⑤传输速率9.6kbps;⑥降低噪声放大器LNA、功率放大器PA、压空振荡器VCO等大部分功能集成在芯片内,外围电路简单易于开发。采用该无线数传模块,可以使车体调平装置满足某型火箭炮调平时的无线数传要求:①适当的通信距离,一般以不超过30m为宜,通信功率过大使通信距离过远,会造成炮与炮之间相互干扰;②较强的抗干扰能力,系统在较强的外界干扰中也能正常工作;③较低的功耗,该装置野外应用,无固定供电电源,只能靠电池维持系统运行。
无线模块ZT-TR43F与单片机接口提供了RS232/TTL/RS485三种接口方式,本系统采用TTL接口方式,方便与MSP430F149单片机的接口。其中MSP430单片机的RXD、TXD口分别与无线模块的TXD、RXD口相接,地线与地线相接。
考虑到多门火箭炮同时调平时,有多个调平装置同时工作,为防止之间相互干扰,采取不同的通信信道或不同编码方式识别,每个装置上带有拨码盘,通过拨码盘设置各自的通信信道或识别码。
调整角度的计算
主控制器接收到车体的纵横向倾斜角度后,需要计算每个千斤顶相对调整的角度,角度计算的几何关系见图5。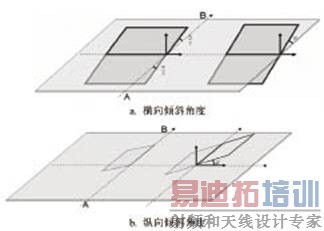
图5 角度计算关系图
如图5所示,车体水平倾斜角度可反映在横向和纵向两个方向,图5中a和b分别为横向和纵向倾斜角度,设α和β为倾角传感器得出的横向和纵向角度。若α大于0,则A端千斤顶打高,B端千斤顶打低。两端千斤顶各位移约为α/2乘以AB端点间隔的一半的距离,然后调整千斤顶直到横向水准气泡居中。若β大于0,则A端和B端同时打低,若β小于0,则A端和B端同时打高。打高过程中调整千斤顶直到纵向水准气泡居中。
软件设计
(1)软件功能
软件功能主要有:①检测操纵指示器连接状态;②连续读取纵横向倾斜角度并求平均值;③将角度值发送给操纵指示器。
(2)开发平台
软件开发选择与装置硬件中单片机相适应的IAR开发平台,使用C语言开发。
(3)软件流程
调平软件完成读取纵向与横向倾斜角度值、模拟显示水准气泡指示、计算并显示左右千斤顶调整方向等功能,其工作流程如图6所示,其中单片机读取角度数据的流程如图7所示。车体调平装置端程序通过串口读取到倾角传感器的纵、向倾斜角度值,根据角度值分别计算出左、右千斤顶的调整方向和模拟水准气泡的中心位置坐标,然后将这些值通过串行通信分别发送到左、右操纵指示器上。
图6 车体调平装置软件流程图
图7 读取角度数据流程图
结束语
高精度调平装置主要用于车载火箭炮平台和导弹发射平台等,本文针对传统车载平台依靠人工手动调整平台水平,从而导致调整时间长、精度低,进而限制影响到火箭炮等武器的机动性和快速反应能力,提出了个人的观点和设计。本文基于MSP430F149单片机,对某型火箭炮车体调平装置的控制原理和结构设计进行了阐述。该调平装置将传感器、数据模块和无线数传技术有机地结合在一起,可实现车体倾斜度的自动快速检测、计算和传输。该装置具有检测迅速、控制灵活和操作简单等优点,能有效提高某型火箭炮的机动性和调平精度。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
