- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
智能车的设计
录入:edatop.com 点击:
摘要:为了综合利用控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等专业领域知识,设计实现了一个基于PID控制算法,CCD检测系统,并采用HC9SDGl28单片机作为主控芯片的智能车系统。该系统使用Codewarrior IDE集成开发环境作为程序设计的基本软件平台,能利用摄像头自动识别路况,进行图像处理,进而调整方向沿预定轨道前行,具有很强的可靠性、稳定性、快速性、扩展性。
关键词:PID;自动识别;图像处理;智能车
0 引言
轮式小车是智能小车机械结构的主体部分,由车身、轮子、速度传感器、转动轴等结构部件构成。还包括提供动力的驱动器,采集环境信息的摄像头等模块,综合实现收集小车的自身状态信息或外部环境信息,并对传感器的数据进行分析、融合,动态调整小车的运动状态,实现在一定条件下的自主寻迹行驶。
本智能车采用PID控制算法,使用CCD线型摄像头作为黑色引导线的检测设备,经LM393比较后供单片机进行数据采集,图像识别,从而可以进行路径识别。电机驱动采用的是PC33886,使用直射型光电传感器来测量速度,并将相关信息显示在LCD液晶显示屏上,并采用4个按钮按键进行参数设定,为现场调试提供了友好的人机交互界面。
1 系统框架设计
整个车模系统可以分为三大部分:环境图像采集部分、电机和舵机驱动部分、中央数据处理部分,且采用16位微控器MC9S12DGl28B作为核心控制单元,系统框图如图1所示。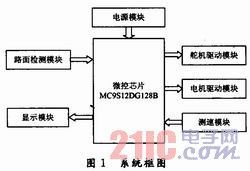
智能车的动力部分使用的是常见的小型永磁式直流电机。这种电动机的驱动电路非常成熟,既有分离元件组成的驱动器,也有一体化的功率集成驱动芯片可供选用。
智能汽车最重要的部件,也就是智能汽车的大脑——中央处理系统。它不仅负责将环境图像采集部分送来的图像数据进行处理,还要将这些信息转化成为电机的驱动控制信号,使整车按照预定的规则前行,这就要求该系统具有庞大的数据处理能力。
2 路面检测模块
2.1 路面检测方案比较及可行性分析
环境图像采集部分可以采用阵列红外探头和CCD或CMOS图像传感器来实现,前者的特点是价格低廉、电路简单、应用方便,缺点是性能有限,对复杂环境的适应能力较弱,效果较差。而CCD或COMS图像传感器(摄像头)就能弥补阵列红外探头的各种缺点。
为了能快速采集图像数据并且兼顾开发的难易程度,在此次设计中将采用输出标准TV视频信号的黑白监控摄像头。这种摄像头可以配合行、场同步信号分离电路和单片机自身的A/D转换电路,可以将图像方便地采集进来,从而回避数字型摄像头复杂的总线协议和数据处理过程。
2.2 硬件设计
LM1881视频同步信号分离芯片可以从摄像头信号中提取信号的时序信息,LM1881的同步分离电路如图2所示。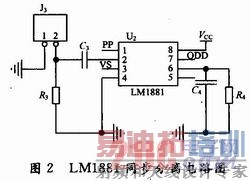
引脚2为视频信号输入端,摄像头信号即由此输入LM1881,引脚3为场同步信号输出端,当摄像头信号的场同步脉冲到来时,该端将变为低电平,一般维持 230μs,然后重新变回高电平,引脚7为奇一偶场同步信号输出端,当摄像头信号处于奇场时,该端为高电平,当处于偶场时,为低电平。奇一偶场的交替处与场同步信号的下降沿同步,也就是和场同步脉冲后的上升沿同步。
[p]
3 速度传感器
3.1 方案选择
(1)霍尔传感器配合稀土磁钢
优点:获取信息准确、体积小、不增加后轮负载。
缺点:齿轮出靠近主驱动电机,容易受磁场干扰,对齿轮打孔容易顺坏齿轮。
(2)光电传感器
优点:体积小、不增加后轮负载、反射型方案对原有器件不需要再加工。
缺点:精度受到光电管体积的限制。
(3)光电编码器
优点:获取信息准确、精度高。
缺点:增加后轮负载、体积大。
比较以上三种方案,考虑到系统的可靠性,主后轮转动齿轮为塑料质地,打孔比较危险,而且车重的任何增加都有可能影响到车速,最终决定采用直射型光电传感器。
3.2 硬件电路设计
传感器电路结构图如图3所示。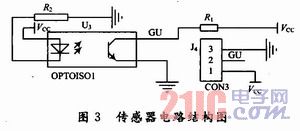
4 驱动部分
4.1 电机驱动器选择
根据电机学和电力拖动理论,电机驱动器要有足够的电流输出能力来保证驱动力的充足。综合考虑,电机驱动器采用一体化的专用功率驱动集成电路进行设计分离元件(场效应管)构成的驱动器。
根据电机学,直流电动机转速,n的表达式为:
![]()
式中:U为电枢端电压;I为电枢电流;R为电枢电路中电阻;φ为每级磁通量;K为电动机结构参数。
由式(1)可知,直流电动机的转速控制方法可以分为两大类:对励磁磁通进行控制的励磁控制法和对电枢电压进行控制的电枢控制法。现在大多数应用场合都使用电枢电压控制法,本设计采用的是在保证励磁恒定不变的情况下,采用PWM来实现直流电动机的调速方法。
电动机的电枢绕组两端的电压平均值U。为:

式中:占空比D表示在一个周期T里开关导通的时间与周期的比值,D的变化范围为0≤D≤1。由式(2)可知,当电源电压Us不变的情况下,电枢两端电压的平均值Uo取决于占空比D的大小,改变D值也就改变了电枢两端电压的平均值,从而达到控制电动机转速的目的,即实现PWM调制。
为了便于取材和设计方便,此次设计选择了飞思卡尔半导体公司的PC33886。PC33886在PWM调速模式驱动下可以接受20 kHz的工作频率;具有过热、过流、短路保护,并且通过一条反馈线将器件的工作状态反馈给单片机。
4.2 舵机控制
舵机控制程序流程图如图4所示。
车模在行驶过程中不断采样路况信息,并通过分析车模与赛道相对位置判断车模所处路况,计算转弯半径。所有舵机标准PWM周期为20 ms,转动角度最大为90°,当给舵机输入脉宽为0.5 ms,即占空比为O.5/20=2.5%的调制波时,舵机右转90°。可以推导出转动角度与脉宽的关系计算公式为:
t=1.5±θ/90
式中:t为正脉冲宽度,单位:ms;θ为转动角度;当左转时取加法计算,右转时取减法计算。
在具体操作中PWM调制波的周期可以设置在20 ms左右一定范围内均可以使舵机正常转动,经反复测试最终把输出PWM调制波周期设为13 ms。
运行电机的转速以及舵机的转角,在软件上都是通过对PWM波占空比进行设置来相应控制的。
[p]
5 电源模块
电机驱动系统要求大功率的电源供应:低内阻、大电流、对电源的纹波不敏感;单片机和图像采集系统对电源质量要求较高:低内阻、波纹小、自身功耗不大,但要严防电动机在工作时产生的干扰。供电系统框图如图5所示。
由于摄像头需要一个9~12 V的电压才能正常工作,而充电电池的电压只有6~7.2 V。所以DC-DC升压电路便成为必须。
DC-DC电压变换采用MC34063A集成电路,该器件内部集成了温度补偿器、比较器、动态电流带限占空比可控的振荡器和一个高电流输出驱动器。输出电压直接由两个外接的误差为2%的电阻控制。该电路可以方便地应用于升压和降压两种场合,电路原理图如图6所示。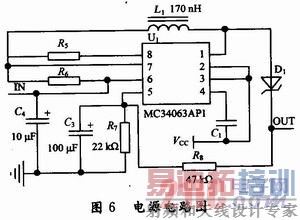
6 软件设计
软件结构图如图7所示。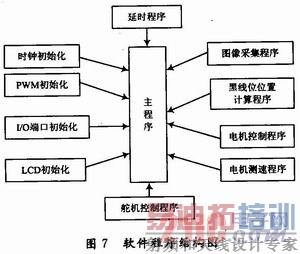
整个小车自动识别控制过程都是通过主控单片机芯片上的程序控制来完成整个智能控制过程。小车开启后将自动沿着有一定宽度的黑线轨道行驶,行驶中将连续检测到的黑线位置信息反馈给主控芯片,通过主控芯片处理后将执行结果反馈给控制器,进而控制小车前行方向,并通过软件检测小车速度及按键的更改信息最终将结果通过LCD显示屏显示。
7 结语
智能车设计涉及控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等专业领域。整个设计没有采用过于复杂的检测方法或控制算法,而是采用了摄像头图像处理技术和经典PID控制算法,这样不但能保证系统的可靠性、稳定性与快速性,而且节省了成本与工作量。在控制算法上,PID控制保证了系统的快速和稳定;在检测方法上,摄像头连续检测的设计,保证了高速直线行驶的无抖动,以及光电管测速方法的应用,保证了测速系统的简单可靠。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
