- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
MATLAB中的SISOTOOL在数字式移相全桥中的应用
录入:edatop.com 点击:
摘要:开关电源技术的数字控制可实现先进的控制策略,简化系统的结构,缩小体积,提高系统性能。本文用MATLAB中的SISOTOOL实现了数字控制移相全桥的PI补偿,解决了移相全桥PI参数设计困难的问题,并用Simulink仿真验证了设计的结果。 叙词:SISOTOOL 移相全桥 数字控制 Abstract:The digital control of switching power supply technology can achieve advanced control strategy, simplify the system structure, reduce the volume and improve the performance . This paper realize the PI compensation of digital control Phase Shift Full Bridge, resolves its difficulty for designing PI paramenters using SISOTOOL of MATLAB and the simulation proves the result designed. Keyword:SISOTOOLPhase-Shifted-Full-Bridge digital control
1、引言
移相全桥在大功率场合应用的比较多,是技术比较成熟的一种开关拓扑。移相全桥DC/DC变换器是非线性时变电路。在分析时,用经典线性电路理论和控制理论对其进行小信号建模,建立开关的状态空间平均模型,对其配置零极点,设计控制器。而在数字控制里,最重要的就是PI调节。
PI参数的选择是很有讲究的。移相全桥空载的时候是一个欠阻尼二阶系统,带载时,系统的零极点又会发生变化。所以,PI的选择要使系统在整个负载范围内保持良好的动静态特性。PI参数的计算也有难度。用单环控制进行调节,可使控制器的设计简化,但是这种方法只有当负载扰动的影响在输出端表现之后,控制器才有反应,控制速度不快。因此,采用电压电流双闭环控制,当然,控制器比单环控制时更难设计。
用MATLAB中的SISOTOOL模块,在闭环控制系统的设计过程中进行校正,减少了设计的复杂性和重复性,有效地提高了校正系统的控制精度,给控制系统的设计带来更高的效率和更好的质量,简化了设计电压电流双闭环控制过程中大量的计算,最终得到稳定的模型和好的动态特性。
2、移相全桥的模型
移相全桥ZVS变换器和普通的BUCK变换器有一定的相似性,由于移相全桥有漏感,所以又有着显著的不同。占空比 对电感电流
对电感电流 的传递函数[1]是
的传递函数[1]是
 (1)
(1)
其中Rd=4n2Llkfs。
经过计算,选取Uin=400V,U0=48V,开关率频fs=100kHz,输出功率P=400W,RL=5.76Ω。根据计算得,n=5,Lf=150uh,Cf=330uh, Llk=80uf。
3、用SISO对移相全桥控制器进行PI参数配置
对一般的控制系统来讲,控制系统对开环频率特性的要求如下:
(1)为了获得较好的系统稳定性,开环系统中频段应有足够的频带宽度,以-20dB/dec的斜率穿越0分贝线;
(2)为了获得较好的动态特性,截止频率 应较高;
应较高;
(3)应该留有足够的相位裕量 ,工程领域普遍认为=45°表示系统具有足够的相位裕度,相位裕度越大,对应系统的超调量就会越小;
,工程领域普遍认为=45°表示系统具有足够的相位裕度,相位裕度越大,对应系统的超调量就会越小;
(4)为了提高系统的稳定特性,低频段应该有高的增益;
(5)为了提高系统的抗高频干扰能力,高频段应该有快的衰减。
本文采用全数字控制环路设计方法,在连续域中,通过SISOTOOL来配置PI控制器,离散化后再由DSP控制,移相全桥系统框图如图1所示。
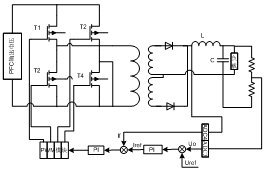
图1 移相全桥的控制框图
SISOTOOL是MATLAB中的一个图形用户界面,通过利用根轨迹图或伯德图来调整单输入单输出反馈控制系统,进行控制器的设计。它不需要以命令行的方式输入大量的指令,只需导入各环节的模型,用鼠标可以直接对屏幕上的对象进行操作。这样,与SISOTOOL连接的可视分析工具LTIviewer马上显示出设计结果,用户可结合闭环响应来调整增益和零极点,从而设计出满意的控制器。本文主要通过频域调节的方法,来得到合理的补偿控制器。
3.1 电流环的设计
以输出滤波电感电流作为电流反馈,电流环功率级的传递函数计算后为

将输出滤波电感的电流作为控制系统内环,不仅可以大大提高控制系统的稳定性,改善系统的动态特性和稳态特性,而且还可以提供快速的过流保护。带电感电流内环的控制系统框图如图2所示。
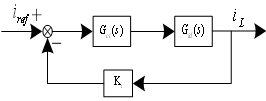
图2 电流控制环 [p]
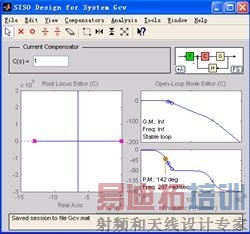
(1)取Ki=0.1,在命令行输入电流环功率级的开环传递函数,num=[0.066,34.722];den=[0.0000000495,0.2679,139.89];G=tf(num,den);sisotool
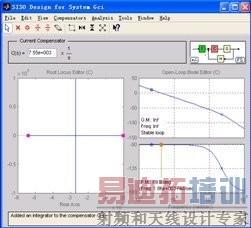
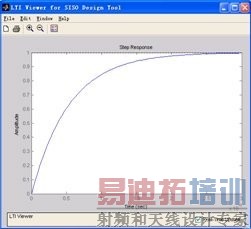
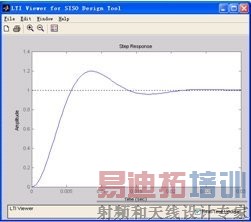
(2)导入系统各个环节的模型。点击“File”菜单下的“import..”导入对象模型G,出现如图3(a)所示界面。可以打开Analysis里面的Response to
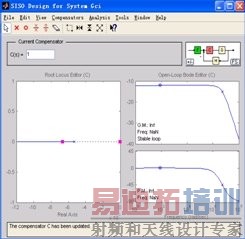
(a)
(b)
图 3
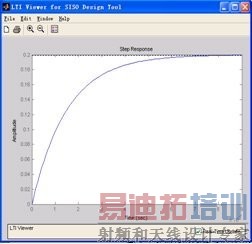
Step Command第一步,观察开环系统的阶跃响应,如图3(b)所示。
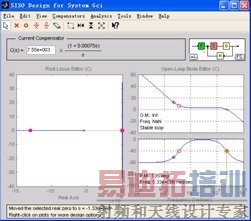
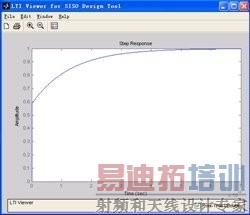
观察它的幅频特性,低频增益太低。由其阶跃响应可知,系统有静差,需要增大其比例系数。可用鼠标拖住右边幅频特性中的图形,使其增益大于一定数值,使阶跃响应无静差。然后,再加入积分环节也可相应提高其低频部分的增益。如图4所示。
(a)
(b)
图4
为了使系统具有更快的动态响应,在保证系统稳定的前提下,电流环的截止频率不仅要大于电压环的截止频率,而且应该越大越好,因为该电流必须有足够的带宽使电流跟踪电流给定。一般取电流环的截止频率为开关频率的1/5~1/10。
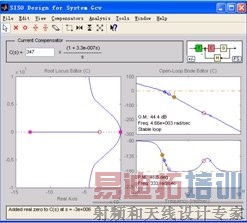
为了保证足够的相位裕度,而且保证较高的截止频率,且以-20db穿越,考虑添加一个零点,再进行适当的调整,可得图5所示的图形。当相位裕度很大,截止频率很高时,系统超调很小或无超调。得到电流环的PI环节为 
PI环节的参数是Ki=7550,Kp=5.67,相角裕度为135°,截止频率为5.33×106rad/sec。
(a)
(b)
图5
3.2 电压环的设计
电压环的补偿网络是把已经设计好的电流内环看做电压调节系统中的一个环节来进行。就是说,设计电压补偿环节的时候必须先把电流环闭合,控制对象是输出误差电压控制信号到变换器输出电压的传递函数。对电压环来说,其功率级的传递函数包含电流环和负载。其系统控制框图如图6所示。
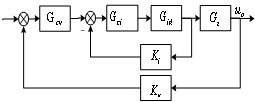
图6 电压控制环
(1)首先要得出电流环的闭环传递函数
在command window输入下列语句:
num=[0.66,347.22];
den=[0.0000000495,0.2679,139.89];
num1=[5.67,7550];
den1=[1,0];
[num2,den2]=series(num,den,num1,den1);
num3=[0.1];
den3=[1];
[num4,den4]=feedback(num2,den2,num3,den3);
printsys(num4,den4);
(2)电流环的负载是由输出电容和负载组成的网络,和上一个环节串联。
 [p]
[p]
在command window输入下列语句:
num5=[5.76];
den5=[0.0019008,1];
[num6,den6]=series(num5,den5,num4,den4);
(3)取Kv=1/48,输入如下的指令:
num7=[1];
den7=[48];
[num8,den8]=series(num6,den6,num7,den7);
G1=tf(num8,den8);
Sisotool;
(4)同理,导入对象模型,命名为Gcv。观察开环系统的阶跃响应,如图7(b)所示。开环系统的阶跃响应有静差,因此,应该增大低频增益使其阶跃响应达到1。相应的加入积分环节也可以提高低频增益。
(a)
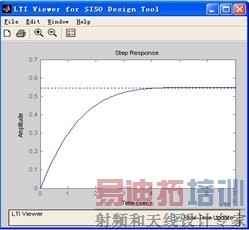
(b)
图7
经过调节后电压环的PI配置为

相角裕度为48.5°,截止频率为333rad/sec。系统幅频特性和阶跃响应如图8所示。
(a)
(b)
图8
4、仿真结果
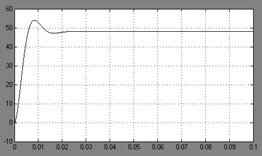
图9 移相全桥输出电压波形
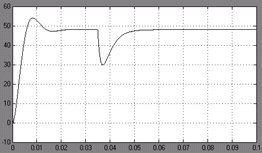
图10 有负载扰动时的波形
图9为移相全桥在正常情况下输出电压的响应波形,电压在很短的时间内达到48V。图10为有负载扰动时的波形,系统在遇到扰动后很快恢复平衡,输出仍然为48V。
5、结论
采用SISOTOOL可以很快的设计出系统的双控制环,既能保证系统的稳定性,也能保证系统好的动态性能,大大缩短了设计系统需要的时间。在模型复杂、二阶以上的数字控制的电源系统中,用SISOTOOL对闭环控制系统进行校正,减少了设计的复杂性,有效地提高了校正系统的控制精度,提高了控制系统的设计的效率和质量。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:5kW光伏逆变电源DC-DC模块的设计
下一篇:峰值电流模式控制中的斜波补偿技术
射频和天线工程师培训课程详情>>
