- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
一种机载高可靠离散量输入输出系统设计
录入:edatop.com 点击:
摘要:飞机机电管理控制器对于保证飞机的正常飞行起着非常关键的作用,而如今飞机上各种机电设备越来越复杂的情况下,对于离散量信号的输入输出可靠性有着越来越高的需求。本系统通过合理的硬件设计,实现了具有自测试功能的冗余硬件配置,同时结合通道管理设计,保证了离散量信号采集和输出的高可靠性,具备较强的应用价值。
0 引言
近年来,航空业发展突飞猛进,飞机上的仪器设备正在朝多电式,全电式的方向发展。机电管理控制器作为飞机上机电设备的控制“大脑”,需要处理越来越多的机电信号。而机上恶劣的工作环境和飞行安全要求的迫切性对机电信号处理的可靠性提出了很高的要求。在空中复杂的环境条件下,在大气压力、盐雾、电磁干扰、温度、湿度、振动和加速度多种因素的影响下保证电路的稳定性是所有航空电子设备面临的问题。本文在设计中充分考虑电路的性能和防护,通过单个电路的详细设计堆叠保证整个系统的可靠性。在满足基本电路性能的基础上,通过测试性电路和通道冗余配置,极大的提高了系统的可靠性,提升了传统简单设计在可靠性方面的潜力。
1 总体系统方案设计
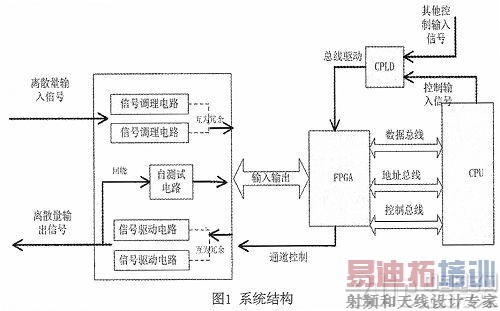
对于飞机机电信号而言,开关离散量信号是一种常见信号。离散量信号多负责机电设备的状态指示和开关动作,比如起落架系统中舱门状态,作动筒位置,照明系统中信号灯开关,等等。离散量信号包括28V/开、地/开、115V交流/开等多种制式,本文主要针对28V/开和地/开离散量信号进行详细设计。在系统中,输入离散量信号从各个机电子设备而来,采集输送给机电控制器。输入信号需要通过相应的调理电路,转换成FPGA标准的IO信号进行采集。FPGA的内核访问这些I/O获取外部接口数据,通过双口RAM提供给主处理器,同时FPGA的内核也通过双口RAM获取主处理器要求输出的数据,根据这些数据输出相应的I/O,经过外部驱动后控制负载。离散量的输入和输出均采用双通道的冗余设计,提高了可靠性。CPLD主要作用是获取健康判定信号,通过一定的逻辑处理输出给FPGA作为通道选择的依据。总体设计方案如图1所示。
2 硬件设计
2.1 离散量输入信号
2.1.1 28V/开离散量输入信号
单路离散量输入信号通过两个完全一致的冗余电路进行采集,通过光耦将信号转换为标准TTL信号,同时实现了外部接口电路和内部电路的隔离,提高了安全性和可靠性。

28V激励源由机上电源提供,目的是做自测试使用。自测试电路的增加,有利于快速的发现和定位故障并进行隔离,有效的提高了整机的可靠性、测试性指标。为了保证自测试电路不对采集电路造成干扰,V1二极管可以防止28V激励源对外部输入信号源的影响,V2、V3二极管可以防止在自测试状态时,每个光耦输入端互相影响。
为了能够将离散量的采集范围控制在适应机上供电波动的合理范围内,光耦的选型需要满足一定的条件。选择光耦的导通电流为0.5mA,导通时光耦压降为1.4V,再根据二极管和稳压管的导通特性,可以得知最低的输入导通电压为0.5*10+6.2+1.4+0.7=13.3V。而当输入信号发生高的拉偏时(典型值为32V),此时光耦能够导通并且导通电流为(32-6.2-1.4-0.7)/10=2.37mA,小于导通电流的最大值5mA,光耦正常导通。上述分析的采集电压范围保证了在飞机上信号源受到干扰而发生拉偏的时候,本系统仍然能够采集到正确的值。
2.1.2 地/开离散量输入信号
地/开离散量输入信号采集与28V/开信号原理类似,只是光耦导通情况相反。当28V输入时导通,开路时不导通;而地/开输入信号时不导通,开路时导通。原理如图3所示。
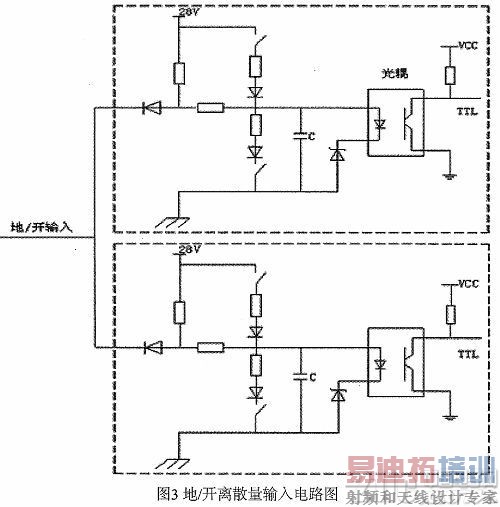
光耦选型不变,稳压管选型为压降3.9V型,这样当内部电源拉偏为18V-32V的范围内时,光耦导通电流为0.635mA至1.335mA,光耦正常导通。当外部输入信号为9.6V以下时,光耦均不导通,也就是能够采到“地”的状态。这也满足了机上要求。而光耦在两种电路上选型一致,提高了系统的可维修性和保障性,通过对被选型光耦的充分验证,也在实际上提高了系统的可靠性。
2.2 离散量输出信号
2.2.1 28V/开离散量输出信号
离散量输出信号的实现原理是通过FPGA输出信号经过驱动之后控制继电器直接输出。在输出线路上串联二极管和可恢复熔断丝,二极管用于双通道之间的输出隔离,熔断丝用于过流保护。
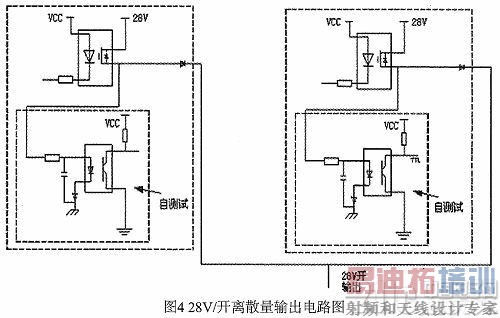
双通道的设计实现了冗余输出,进一步配合CPLD的通道故障逻辑的通道管理,提高系统的可靠性。通过回绕的方法进行自测试,可以有效的监控通道状态,提高可测试性。
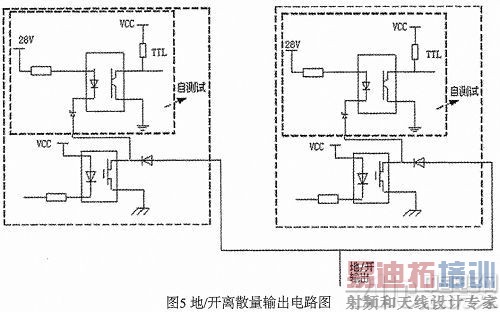
2.2.2 地/开离散量输出信号
原理与28V/开输出类似,如图5所示。
3 通道管理设计
前述双通道和自检电路的硬件设计,为的是提高整个系统的可靠性和可测试性。为了实现这一目的,相应的通道管理也是非常重要的。
3. 1 离散量输入通道管理
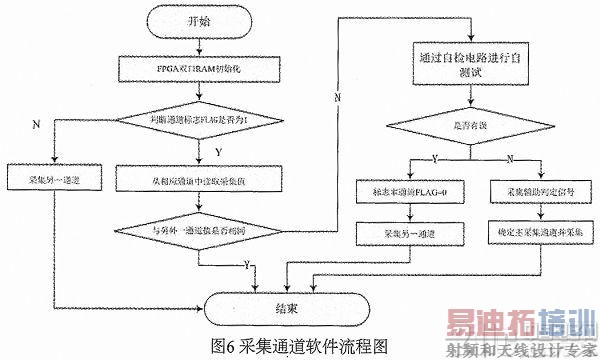
离散量输入主要是对采集到得状态进行上报,可以根据相应通道的BIT结果确定置信通道。因此其管理可以通过软件进行。在采用C语言编写的主程序内,按照一定的策略实现了双通道比较处理。其流程图如图6所示。
3.2 离散量输出通道管理
离散量输出控制机上电机动作,属于关键离散量。在正常情况下,两个通道的离散量输出同时有效输出。当系统发现某个通道的BIT存在故障时,应该第一时间通过软件关断该输出。但是在某些情况下,比如光耦被击穿的情况,软件无法关闭该通道。这时候就需要其他方法关断。为了增强通道管理的有效性,将离散量输出分为若干组,每一组增加一个二级继电器进行组控管理。设计如图7所示。
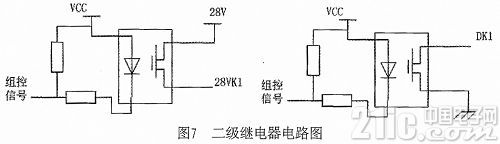
其中继电器的输出连接至需要控制的离散量输出的“地”端或者“28V”端,只有当继电器闭合时候,相应的离散量才能够输出。
CPLD上的通道故障逻辑也是通过上述继电器组控电路起作用的。通道故障逻辑可以接受来自CPU和其他模块的健康指示信号,判定某一个通道的有效性。这也很大程度上提高了通道管理的有效性和准确性。在通道故障逻辑的设计中,需要防止一种“过度保护”的局面出现。即如果两个通道相关的健康判定信号都表示有误,那么就会关闭两个通道从而导致没有输出通道能够正常输出。正确的做法是,如果两个通道陆续出现错误,应当至少保证一个通道能够工作。在逻辑的设计中可以通过D触发器的特性巧妙的实现。示意如图8示。
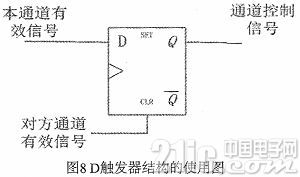
在使能端有效的情况下,D触发器的输出端随输入端变化而变化:否则输出端保持不变。如果将另~通道有效信号作为D触发器的使能信号,则可保证当有一个通道失效时,另一通道恒为保持有效。
4 系统可靠性分析
任务可靠性是产品在执行任务过程中完成规定功能的程度。对于处于高速飞行状态的飞机,机电设备的每一个动作都对飞行安全有着重大的影响,因此机电系统的任务可靠度是评价其好坏的重要指标。
首先分析在传统的单通道设计的情况下系统的可靠性。对于单通道的设计,离散量输入输出系统整个任务可靠性框图如图9所示:
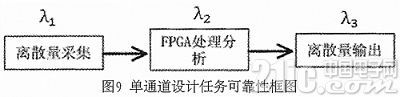
这是一个典型的单元串联可靠性模型。按照可靠性模型理论,可靠度R(t)符合指数分布。
如果每一个单元都有一个常数的故障率λi,则系统可靠度可以表示为
![]()
式中λs即为系统故障率。根据经验置三个框图对应的平均故障前时间MTTF分别为10000/小时,8500小时,9000小时,则可根据MTTFs=1/λs推知系统总的平均故障前时间为3041.75小时。
本文设计的系统为输入和输出均为双通道,对应的任务可靠性框图如图10所示:
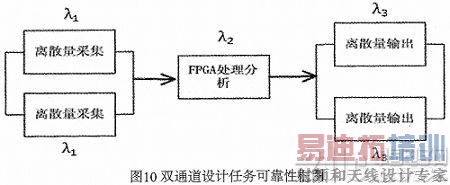
可以看出系统是一个并-串联的混联系统。则可推算系统总的任务可靠度
![]()
同样按照单元可靠性符合指数分布的假设,可以推知系统总的平均故障前时间算式:
![]()
用数学工具MATLAB计算得到MTT为4807.86小时,可以发现通过双通道的设计之后,任务可靠性得到了很大的提升。
5 结束语
本文针对机载设备对离散量输入输出的需求,介绍了一种高可靠的离散量采集和输出系统。通过合理的器件选型满足了电路基本性能的需要,同时通过自测试电路的设计,提高了系统的测试性和可靠性。在硬件双通道配置的基础上,通过合理的通道管理,保证了整个系统的可靠性。最后的理论推算表明,双通道的设计能够有效的提升系统的任务可靠度。本系统已经在某型军用项目上实际使用,并已通过各种试验验证,性能稳定可靠。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
