- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
PLC在12轴圆网印花机上的应用
录入:edatop.com 点击:
1 前言
圆网印花机通常由进布装置、印花机头、烘燥装置、落布装置等四部分组成。目前,圆网印花机分为八色、十二色、十六色、二十四色等。圆网印花机的圆网周长主要有640mm和904mm两种。其中,640mm圆网印花机居多。圆网印花机具有操作简便、劳动强度小、产量高等特点,适合各种织物的印花,同时也适合多品种小批量织物的印花。主要装置介绍如下:
进布装置:有布车进布和布卷进布两种。布卷进布时,可将摆动式引布辊压在布卷上,依靠引布辊转动把布导入印花装置。进布时被织物随循环运行的橡胶导带前进而完成印花。此导带先经给胶辊在表面涂一层热塑性树脂薄层,可平整地粘贴织物。

图1 12套色独立传动圆网印花机
印花装置:圆网印花装置包括圆网、刮刀、给浆装置等,如图2所示。

图2 印花装置
圆网是印花机的花版,由镍金属制造,又称镍网,呈六边形网孔。圆网两端以闷头固定,以防印花时圆网变形,影响对花的准确性,能承受印花时色浆和刮刀的压力。为了提高圆网的弹性,减少承受的压力,圆网要偏离支撑辊中心线安装,一般要偏离16mm左右。每一圆网机座有一示读装置,可显示出各方向上所受的刮刀的压力。
刮刀安装在圆网中心线上的刮刀架上。刮刀架既装有刮刀又装有给浆管。刮刀系采用铬、钼、钒、钢合金制造,具有摩擦系数小和可以任意调节角度的特点。印花时,刮刀的刀口和圆网的内圆相切,刮刀对色浆以施加压力为主、刮为辅的复合动作。
圆网印花机的刮刀压力和位置可以调节,以适应各种花型和各种厚、薄色浆的织物印花。
印花装置圆网印花机是自动给浆,每一圆网都配有给浆系统。供应色浆时,将机台上塑料管一端套在金属给浆管上,而机外另一端软管插入色浆桶内,用泵输入圆网,由电极自动控制色浆液面的高度。
烘干和摆布装置:圆网印花机采用松式热风烘干。印花后即和橡胶导带分离,导入烘干部分,松式平放在涤纶网上,经热风烘干出布。出布由电动摆布轴牵引落入布车内。
圆网印花机具有劳动强度低、生产效率高、对织物适应性强的优点,适合于化纤织物、针织物、轻薄织物印花;能获得花型活泼、色泽鲜艳的效果,并可避免传色的疵病。但是,受圆网结构的限制,印制精细线条时效果还不十分理想。本文针对圆网印花机的12轴控制作详细介绍。
2 控制系统设计原理
本文中,圆网印花机是12轴印刷,12轴圆网需要位置同步套色,主机在加减速过程中,12轴印花棍需要精确同步跟随。在套色出现偏移时,需要实时调整轴位置。主要的控制要求如下:
2.1 12轴同步跟随控制
印花棍需要与橡胶导带速度同步,橡胶导带由变频器带动主电机经过1/25.5的减速箱控制。跟随主轴安装在主电机后,编码器的分辨率为1024P/R。将编码器信号接到AH10PM的X0.8和X0.9端子,AH10PM可以带6个轴,所以需要两个AH10PM,编码器信号可以并到两AH10PM端子上。在AH10PM可以建立主从电子齿轮关系的运动程序。
2.2 网头单独运行
印刷结束后需要清洗导带和圆网,需要在导带不运行的情况下12个网头单独运行。这个功能可以通过在AH10PM里建立虚主轴,让12个网头跟随虚主轴。虚主轴进行JOG或者变速运动,因12个轴与虚主轴之间建立了主从关系,12个网头就会跟随虚主轴运动。在正常生产时,让虚主轴跟随主编码器运动,而虚主轴一直与12个轴保持主从关系保持在不同情况下都是同步关系。
2.3 对花纠偏
在印花过程中,会因布的张力大小、导带与布之间的摩擦力、圆网变形等情况,造成套色偏移。需要通过纠正网头与导带之间的相位把花色重新对准。我们通过虚主轴与12个轴建立了电子齿轮的关系,在需要进行纠正时,可以实时更改电子齿轮的分子。工艺上纠偏分为快进、快退、慢进、慢退,只要设定不同大小的齿轮比就可以实现。
2.4 触摸屏、模拟量、I/O点控制
圆网印花机的各个装置如烘箱、水气阀、摆布变频器、导带上下、纠偏快进快退慢进慢退按钮都是通过台达DVP-ES2与AH500 CPU进行PLC-link通讯,再由AH500 CPU与AH10PM进行数据交往,把外部信号读进来,更改相应的变量实现控制。
3 硬件架构
根据以上系统要求构建硬件架构,如图3、图4和图5所示。
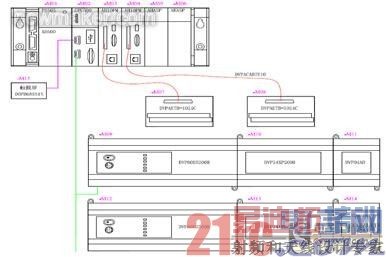
图3 硬件结构图
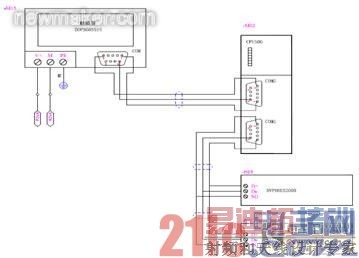
图4 硬件结构图

图5 现场硬件图
需要注意的是实际现场整个电柜的干扰问题。AH10PM的高速计数器的端子是集电极输入,AH10PM的前四轴脉冲输出是差分形式,后两轴脉冲输出是集电极输出,集电极很容易受到外部的干扰,建议主编码器使用推挽的输出方式,屏蔽层要单端接地,整个电柜需要良好的接地,否则很容易造成模块与模块间的位置偏差。
4 软件架构
根据以上系统要求可以构建运动程序架构,如图6所示。
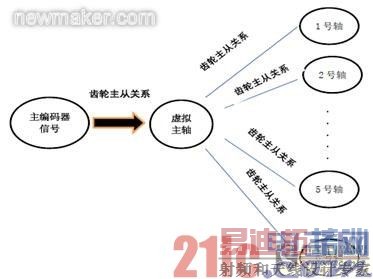
图6 运动程序架构
系统在正常运行时,虚拟主轴跟随主编码器运行,通过改变主编码器与虚拟轴之间的齿轮比,可以在触摸屏里调整导带与网头摩擦系数。当产生套色偏移时,可以调整虚拟主轴与从轴之间的齿轮比来调整导带与网头之间的相位。
当需要单动网头时,可以直接JOG或者变速运动虚拟主轴,从轴同样会跟随虚拟主轴运动。
5 PLC-link与AH500背板数据交换
在本案例中,所有的外部I/O点都是接到台达DVP-ES2小型PLC里,再由PLC-link传到AH500 CPU里。PLCLink是透过RS485的联机来进行数据交换的网络机制。台达AH500是图形化规划接口,提供PLC Link与Ether Link的主机数据交换,便利快速的功能、简单的填表与设定,即可以在免程序撰写下实现复杂的数据交换通讯功能,针对OEM设备集中收集信息至FMCS或ERP的应用需求,特别有帮助。
AH500 CPU与AH10M模块之间的数据是通背板通讯实现,通过建立数据交换表来定义互相交换寄存器地址。
6 程序编写
程序主要分为轴初始化、系统正常生产即跟随主编码器、网头单动、网头对花和纠偏。
1号轴初始化如图所示,其他轴类似。定义运动轴的最高速、最低速和加减速时间以及脉冲输出方式等。AH10PM前四轴最高频率可以达到1MHz,后两轴最高频率是200kHz,为了统一,我们都设为200kHz。
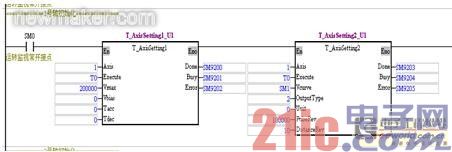
1号轴初始化程序
虚轴建立不需要进行初始化,直接可以用轴号K7~K16来声明。图8是主编码器与虚主轴建立主从关系。Master轴为0,即高速计数器X0.8、X0.9。Slave轴为7,就是虚轴。
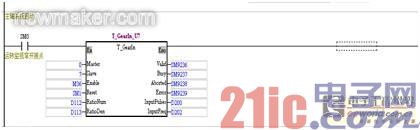
图8 主编码器与虚主轴建立主从关系程序
12轴跟随主编码器运动,建立主从跟随关系。如图9所示为1号轴跟随,其他轴类似。
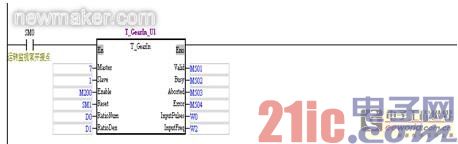
1号轴跟随程序
纠偏功能分为快进、快退、慢进、慢退,可以通过改变齿轮比实现,如图10建立一个跟随条件功能块。
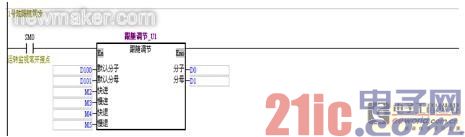
跟随条件功能块
计布长是主编码器的计数长度,这个长度可以随时清零,所以不能直接用虚主轴的脉冲值。但是,可以再建立一个虚轴用于计长,并且可以随时清零而不影响其他轴的正常运行,如图11。
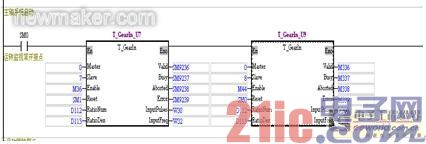
计布长程序
程序中8号轴跟随主编码器记录脉冲数,D200作为计长,当需要清零是只要M44断开一个周期后再导通就可以实现,把D200传到AH500 CPU里计算出长度。
7 结束语
基于台达的中型PLC AH500和AH10PM运动模块的解决方案在圆网印花机上得到了成功应用,车速可以达到100M/min。同时,如果选用台达的伺服驱动器和台达的PLC控制器搭配使用,可以为客户量身定制更多的解决方案,给客户提供低成本、高性能、最优化的系统解决方案。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
