- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于FPGA的卫星导航高精度定位系统设计
录入:edatop.com 点击:
全球卫星导航系统(Global Navigation Satellite System,GNSS)应用产业已成为一个全球性的高新技术产业,无论是军用还是民用,都产生了显著的效益。随着北斗卫星组网的不断完善,基于北斗的双模甚至多模接收机也在加紧进行研发,高精度多模接收机的研制过程中,环路部分和定位部分调试非常重要,直接关系到接收机性能的好坏,而多模多频牵涉到较多的信号通道和环路参数,利用传统的示波器和逻辑分析仪进行调试所观测的数据有限,而且对于出现错误的数据不能及时进行抓捕和分析。FPGA内嵌的Sign alTap II或Chipscope逻辑分析仪占用其内在资源,深度有限,且每次都需要重新编译,占用时间较长,因此如何解决多通道的环路和定位调试过程中的数据监测问题也成为研制卫星导航接收机的关键。
论文针对此问题基于FPGA和DSP设计了GNSS接收机(双模四频,L1,L2,B1,B2)及调试监测软件系统。首先对系统总体进行了设计,然后设计了L2载波接收、多径效应抑制和环路三部分,从而完成了高精度接收机的设计,其次对调试监测系统进行了设计,最后对整个高精度定位系统进行了测试。
1 系统总体设计
卫星导航高精度定位系统的设计主要包括高精度接收机和数据调试监测系统两部分。高精度接收机为COMPASS/GPS双模四频接收机,其每个频点采用了12个通道.共48个通道。该接收机使用了FPGA和DSP芯片相结合的方法,型号分别为Xillinx公司的Spartan6-150和Ti公司的TMS320C6713。总体框图及其单通道框图分别如图1、图2所示。
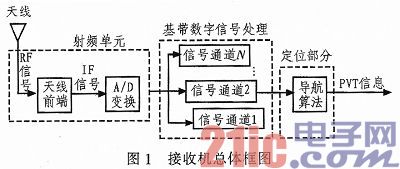
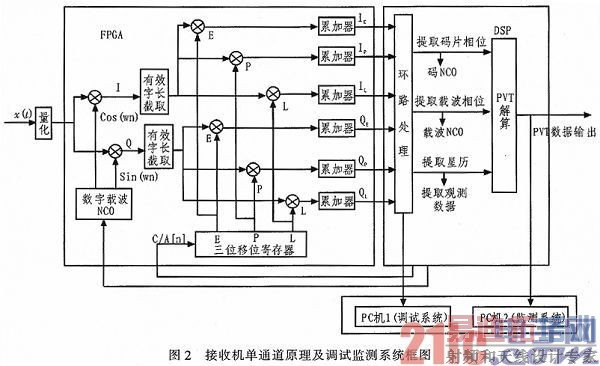
接收机主要由射频、基带和定位三大部分组成,FPGA完成信号的捕获和跟踪,DSP完成导航电文的提取、载波环和码环的鉴相与滤波,并将相关数据通过双向数据总线传送给FPGA,调整码NCO和载波NCO。主要工作流程为:天线收到的射频信号经模拟下变频成为中频信号,再经过A/D采样后送至FPGA处理。经过加权自适应量化后,数字信号与本地复现的正交载波相乘后分成同相(I)和正交(Q)两路数据,I、Q两路信号经过滤波抽取以后送至相关累加器,与本地复现的超前、即时和滞后三路C/A码进行相关累加。六路相关累加值送至DSP,DSP处理之后产生控制信号控制C/A码的产生和载波NCO的相位字和频率字。同时将环路数据和定位数据通过串口传送到计算机上,通过软件编程实现系统的辅助调试和监测功能。
2 高精度接收机设计
高精度接收机与导航型接收机在硬件上差别较大,其射频、基带电路的主要指标都高于导航型接收机。对基带信号处理也有其自身特点,实现难度较大,主要体现在:1)A/D采样时钟频率、稳定度要求较高;2)码相位测距精度高,抗多径技术和时序要求高;3)载波相位的测距精度高,导致本地载波NCO的码表很大、位宽较宽,也需要较好的抗多径抑制;4)高采样率决定了后续的下变频和滤波工作在高速率上,必须合理选取量化位数和本地载波NCO精度;5)码跟踪环和载波跟踪环有成熟的理论可供参考,但是必须通过大量的实验才能获得较优的参数。在时钟选取上,采用美国XX型的钟可以达到较好的效果,虽然也存在零漂,但其均值和方差可以在开机后统计出来,利用计数器统计出每个区间内数据的数目,然后根据结果进行调整。对于高精度接收机,核心是L1、L2、B1和B2频点载波相位的高精度测量,由于L1频率上调制有民码,可以利用C/A码的相关测量L1载波相位,其主要的设计难点在于L2频率载波相位的测量,B1、B2频率为北斗的频率,测量方式与L1频率相似。所有频率载波相位的精确测量都需要解决多径的问题。
2.1 L2载波接收技术设计
美国军方为了防止对军用P码的欺骗,利用保密的W码对L1、L2载波的P码进行调制,形成具有反欺骗功能的Y码。由于GPS的L2载波上仅调制有P码,且不知道Y码的结构,只能利用无码或半无码技术进行L2信号的测量。无码接收技术不需要知道Y码的结构,半无码技术利用了公开的P码,并利用Y码是P码和W码的模2和特点,其中W码带宽约为500kHz。目前,几大厂商采用的无码或半无码技术主要有4种:平方法,交叉相关法,P码辅助L2平方和Z跟踪法。由于平方法存在半波长的模糊度和平方损(降低30 dB)问题,交叉相关法需要宽带滤波,信噪比一样会损失(约27 dB),P码辅助L2平方法只能进行L2载波的半波长测量,因此论文选取Z跟踪法。
Z跟踪法综合了交叉相关和P码辅助L2平方法的优点,同时还利用了W码和P码之间的码长关系(W码码长约为P码码长的20倍),L1和L2信号处理后可以得到W码的估计,原理如图3所示。
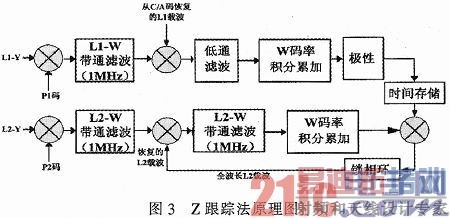
L1、L2信号与本地产生的P码进行相关,当相关器输出的信号包络最大时,认为本地P码与接收的P码对齐。P码相关后的L1、L2载波调制有W码,带宽约为1 MHz。对于L1载波,L1—W带通滤波器的输出与从C/A码恢复的L1载波混频,然后经低通滤波器后进行积分累加,积分时间为W码的码长.积分时刻由P码以及P码和W的码长关系确定。积分累加后输出信号的正负可以作为W码极性的估计。对L2信号进行同样的处理,由于P2码受电离层影响产生的延迟大于P1码延迟,可以认为P2码是P1码经延迟后所得,因此,可以用一个具有可变延迟的P码生成器实现图3中两个P码生成器的功能。
L2-Y码信号与本地P码相关后,与L2锁相环中NCO产生的本地L2载波混频。混频后的信号经低通滤波器后根据L2-P码确定的时刻进行积分累加。L2信号的积分累加输出与时间锁存中从L1信号估计得到的相应L1-W码估计进行相关,当时间同步时,L2积分累加后输出中的W码将被移去,锁相环可以对L2载波进行全波长跟踪测量,而不需要很精确地知道W码的码长。由于L1信号较L2信号强3dB,并且在W码确定以前已经与本地P码相关去掉了L1、L2载波上的P码,使得信号带宽从20 MHz缩小到1MHz,所以其平方损较小(约为13dB),有效地提高了测量中的数据质量。
2.2 多径效应抑制设计
多径效应是影响接收机精度的主要因素之一,可以造成1/4个波长误差。一般是通过抗多径天线和基带信号处理两方面进行修正。基带处理主要是利用窄相关技术或者以
窄相关技术为基础而改进的如MEDLL(Multipath Estimating Delay Lock Loop)、PAC(Pulse Aoerture Correlator)以及Strobe等技术。
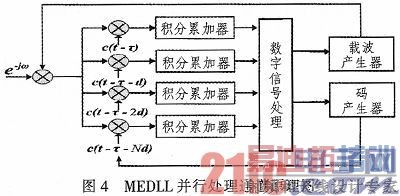
对于测量型接收机,其周围环境较为稳定,多径变化也缓慢,因此在设计时采用了MEDLL技术。MEDLL是建立在统计理论基础上的一种抗多径技术,如图4所示,MEDLL采用多个相关器得到相关函数的多个采样值,然后根据最大似然准则进行迭代计算。理论上,如果接收机受到M路多径信号的影响,就需要进行M次迭代计算,但在实际环境中,并不知道存在多少个多径信号。由于所有的多径信号中只有其中的1—2路占主导作用,因此实际操作中M值一般选取3或4。在迭代计算的过程中,MEDLL将多径信号考虑在内,利用并行通道的窄相关采样,估计出直接信号和多径信号的幅度、延迟和相位,分析延迟最小的信号为直达信号,其它较大延迟的信号认为是多径信号分量被消除。
2.3 环路设计
环路设计包括码环和载波环的设计,主要难点在于设计用于反馈控制设备行为的控制系统,包括延迟锁定环(DLL)、锁相环(PLL)和锁频环(FLL)。好的动态性能要求DLL能够精确跟踪由系统动态而引起的码延迟变化,系统动态包括时钟漂移以及用户和卫星运动的视线方向分量。这里考虑用来自于PLL或者FLL的速率测量来辅助DLL的方案,进而改善其动态性能,对于接收机转到高精度定位时,利用延长积分时间的方案提高测量精度。
载波同步也考虑到两种情况,PLL能够同时跟踪载波频率和相位,测量精度高,但动态性能差。FLL仅能跟踪载波的频率,动态性能较好,但精度较差,因此设计时应根据环境的不同,合理切换为PLL或者FLL。
3 调试监测系统设计
对于所有需要输入的环路数据按功能划分放在一起传输。上电时,FPGA所有的通道处于复位状态,快捕开始工作,搜索卫星,并将1 ms相关累加结果通过数据总线传给DS P。DSP在接收到触发中断信号时,对捕获到的卫星分配通道,复位和初始化。然后将环路信息写入FPGA,进行环路的更新,同时发送通道控制信息,控制相应的地址数据搬移到串口缓冲区,以便进行数据的传输。对于DSP处理的PVT数据,则直接通过数据总线存储到FPGA的双口RAM中,然后搬移到串口缓冲区进行数据的发送。如图5所示,这样FPGA中每个通道和外部的数据总线之间的连接最简单,便于FPGA的布局布线和实现时的功能更改和扩展。
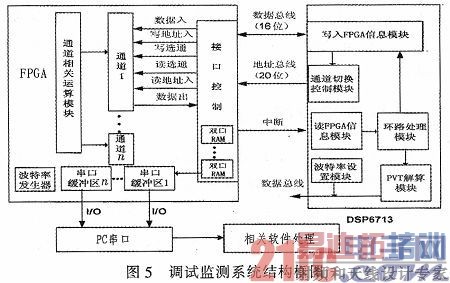
在PC机终端软件设计时,将每个通道的环路数据按时间进行存储,针对特定的通道数据进行实时的显示和分析调试。
4 系统测试与分析
测试时间:2013—2—25下午1点40分;
测试地点:空军工程大学信息与导航学院科研楼,天线放置于楼顶;
测试仪器:接收机板卡、计算机、天线、串口传输线和直流稳压电源。
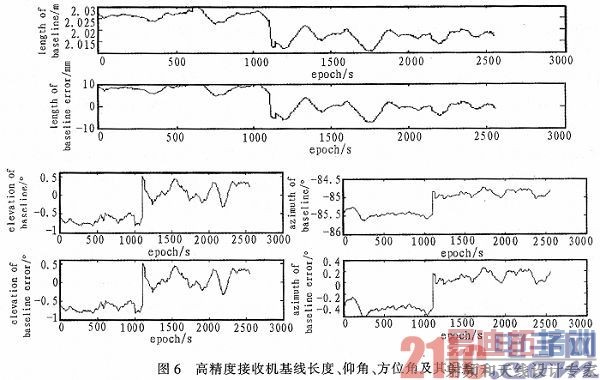
高精度定位解算实验条件:由于高精度的定位解算主要处理对象是载波相位,通过解算整周模糊度来进行RTK验证,实验时采用双天线测姿的方法来验证不仅简便,而且可
靠。具体流程为:首先利用2个NovAtel接收机板卡及天线,并将两天线分别放置于已知基线长度为2.018 m的两端,利用其自带的CDU软件进行长时间解算,得到基线仰角为0°,方位角为-85°。然后换成自研的高精度接收机板卡,进行同样的实验,将采集的数据利用自研的软件进行解算(LAMBDA算法),得到的结果如图7所示。
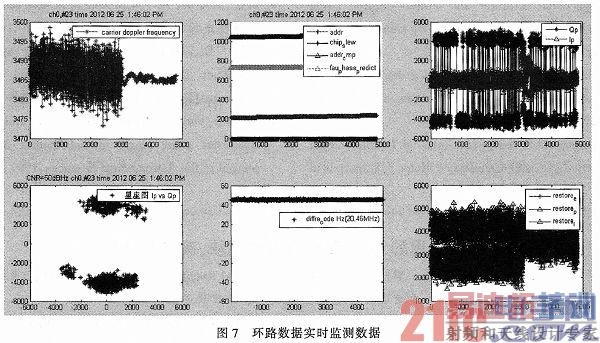
由图7可以看出.基线长度误差在1 cm范围内,仰角与方位角误差也在0.6°范围内,满足精度要求,说明研发的高精度接收机板卡性能良好。
图7所示的结果显示的为5 000个1ms环路数据(5 s),从载波多普勒频移可以看出,这段时内载波环由宽带跟踪转到窄带跟踪。从其它参量也可以得到跟踪性能良好的结论,但在3s左右的时刻出现了I路相关累加值增大情况,这是由于进入窄带跟踪的缘故。
5 结论
系统针对卫星导航高精度接收机的L2载波接收、多径效应抑制和环路三部分进行了设计,同时对调试监测系统进行了设计。通过对设计系统的测试表明,高精度接收机性能
较好,精度在1 cm范围内;调试监测系统达到了辅助硬件程序调试和数据监测的目的。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:基于DSP和FPGA的水声定位系统主控机设计
下一篇:高压变频器在密炼机上的应用
射频和天线工程师培训课程详情>>
