- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
单交叉路口半感应控制器设计
录入:edatop.com 点击:
1 引言
随着社会经济的迅速发展,城市交通日益拥挤,交叉路口是造成交通阻塞的主要因素,交通信号控制作为减少交通冲突的重要方法之一,广泛应用于城市交叉路口。目前实现交通信号控制器的方法有很多种,可采用标准逻辑器件、PLC控制器、单片机控制器等。控制方式主要有多时段、多相位、定时控制及感应控制等多种模式。
定时控制是根据以往观测的实际交通状况,按照预先设定的周期和信绿比进行控制,它对交通流的突然变化毫无反应,无法应付交通量无规律的交叉路口。所以这种控制方式在实际应用中不可避免地存在着无车开绿灯,造成时间损失;有车开红灯,造成车辆等待以及停车等弊端。本文采用的半感应控制,在一定程度上可以克服以上弊端,其特点是信号灯的信绿比不再依靠过去观测到的交通状况,而是依赖现场监测的实际交通状况,以实时检测的交通数据为依据来确定信号的绿灯时间,因而能适应交通流的随机变化,对于主干道交通流稳定、支干道交通流随机波动比较大的路口,这种控制方式极为有效。
随着EDA技术的发展,CPLD/FPGA的优点越来越明显。CPLD是一种用户可以根据实际需要自行构造逻辑功能的数字集成电路。编程可以通过硬件描述语言VHDL设计电子产品,具有很好的兼容性、可移植性、开发周期短。在单交叉路口采用半感应控制方式时,由于系统的具体参数相位、最小绿灯时间和最大红灯时间等都要根据具体的路口规模和交通流量来决定。所以采用CPLD实现的控制器,具有高密度和现场可编程、保密性、抗干扰能力强,便于集成等优点。该单交叉路口半感应控制以CPLD为控制核心,使用VHDL语言编程,可以方便地实现不同控制参数的设定和次干道控制信号信绿比的调节,并对控制结果进行仿真。
2 总体设计
2.1 设计思想
对一个交叉路口实行半感应控制,在次干道的两个路口设置车辆检测器。主干道通行的信号相位为非感应相,次干道获得通行权的信号相为感应相。一般情况下,主干道一直是绿灯,只有次干道检测到车辆,发出感应信号时,其信号才可转为绿灯信号。非感应信号相,设置最小绿灯时间,在次干道车辆检测器监测到车辆时,必须等到主干道最小绿灯时间结束时,绿灯信号才能转移到次干道。也就是说次干道获得通行权,必须具备两个条件:检测器检测到车辆到达,主干道最小绿灯时间结束。
感应信号相(即次干道通行相)设置初始绿灯时间、单位延续绿灯时间和最大绿灯时间。当次干道获得通行权后,控制器先给感应相一个最小绿灯时间,使到达的车辆通过交叉口。如果此后再无车到达,初始绿灯接受,通行权又将转移到主干道,如果在初始绿灯时间内又有车到达,就要在延续一个单位绿灯时间,直到累计达最大绿灯时间。此后,即使次干道再有车辆到达,绿灯时间不再延长,通行权
转移到主干道。半感应控制流程如图1所示
 [p]
[p]
2.2 感应配时设置
单交叉路口半感应控制需要恰当的确定主干道最小绿灯时间、次干道初始绿灯时间、单位延续绿灯时间和最大绿灯时间,以下简要讨论各个参数的设置。
(1)主干道最小绿灯时间 主要由主干道的交通流量来决定,如果次干道只是偶尔有车辆通过,且主干道不是特别主要的城市道,可以取较小的绿灯时间(20~40 s);如果次干道上交通流量较大,为了保证主干道交通不致频繁中断,取较长的最小绿灯时间(40~75 s)。
(2)次干道初始绿灯时间 初始绿灯时间与检测器到停车的距离有关,当然也与检测器到停车线所能容纳的车辆数有关。根据《交通信号设计手册》所推荐的数值转化成米制单位,如表1所示。
(3)次干道单位延续绿灯时间 对于检测器与停车线间距离较大的交叉路口,单位延续时间就是车辆从检测器行驶到进入交叉路口所需的时间;而对于检测器与停车线间距离较小的交叉路口,单位延时绿灯时间是绿灯信号期间驶进交叉口的车对相邻车辆的最大空间时距。一旦单位延时绿灯时间确定,只要车辆间的空间时距小于此值,绿灯信号就停留在次干道,除非最大绿灯时间到达。单位延时绿灯时间可以根据交通调查分析来确定,一般取3~4 s。
(4)最大绿灯时间确定 最大绿灯时间通常取30~60 s,根据路口交通条件决定,当单位延时绿灯时间取值较小时,只要交叉路口交通量不是过饱和,次干道绿灯信号不会经常达到最大绿灯时间。
2.3 控制系统结构
系统采用CPLD实现,基准时钟厂由外部电路提供,设户10 MHz。按照设计要求,将系统分为半感应主控制、分频、非感应相和感应相计数等模块。分频电路对输入f=1 MHz的时钟信号进行1 05分频。得到10 Hz信号用作半感应主控制模块的时钟信号:将主控部分时钟再10分频,得到1 Hz信号作为非感应相和感应相计数器的时钟输入信号。半感应主控部分是设计核心,由其产生感应相和非感应相的控制信号,各个信号灯的控制信号时序应满足半感应控制和相位转换要求,图2为其系统整体电路结构。

3 VHDL程序设计与仿真
3.1 层次化设计
编程使用VHDL硬件描述语言。对于顶层设计模块,其输入信号为时钟信号(f)和复位信号(Reset)以及车辆检测信号(Sensor),输出信号包括主、支干道绿灯、黄灯、红灯控制信号。底层设计,按其功能可分为分频、主控制器、感应相信号计时、非感应相信号计时等4个单元。
3.2 主控制模块的VHDL设计
主控制模块在时钟脉冲和复位信号的控制下,形成感应相和非感应相的绿、黄、红灯的控制信号。程序设计采用2个进程,分别实现有限状态机(4个状态)和状态译码。图3为主控制器的状态,s0为非感应相绿灯,感应相红灯;s1为非感应相黄灯,感应相红灯;s2为非感应相红灯,感应相绿灯;s3为非感应相红灯,感应相黄灯;Sensor为感应相有车标志,mgt_1为非感应相最小绿灯到标志;bgt_1为感应相最大绿灯到标志。[p]

3.3 仿真与时序分析
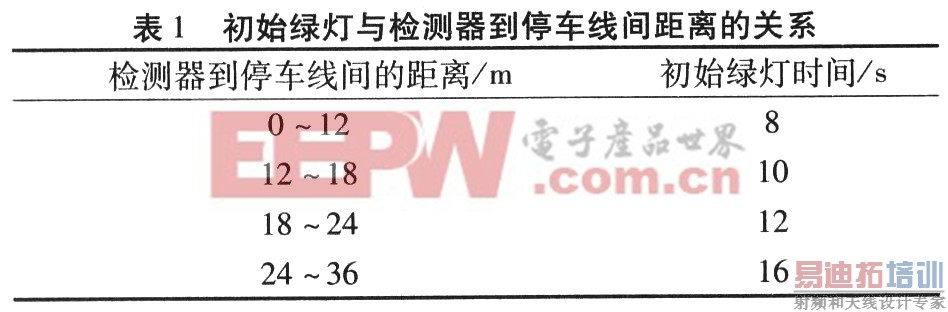
采用CPLD设计单交叉路口半感应控制器,设计完成后使用MAXPLUSⅡ对各个模块进行系统仿真。系统参数设置:非感应相最小绿灯时间为40 s,黄灯为2 s,感应相单位绿灯延续为4 s,感应相最大绿灯时间为28 s。my,mr,mg分别为非感应相黄、红、绿灯控制信号;by,br,bg分别为感应相黄、红、绿灯控制信号。图4为感应相有车时仿真图,图5为感应相仿真图。
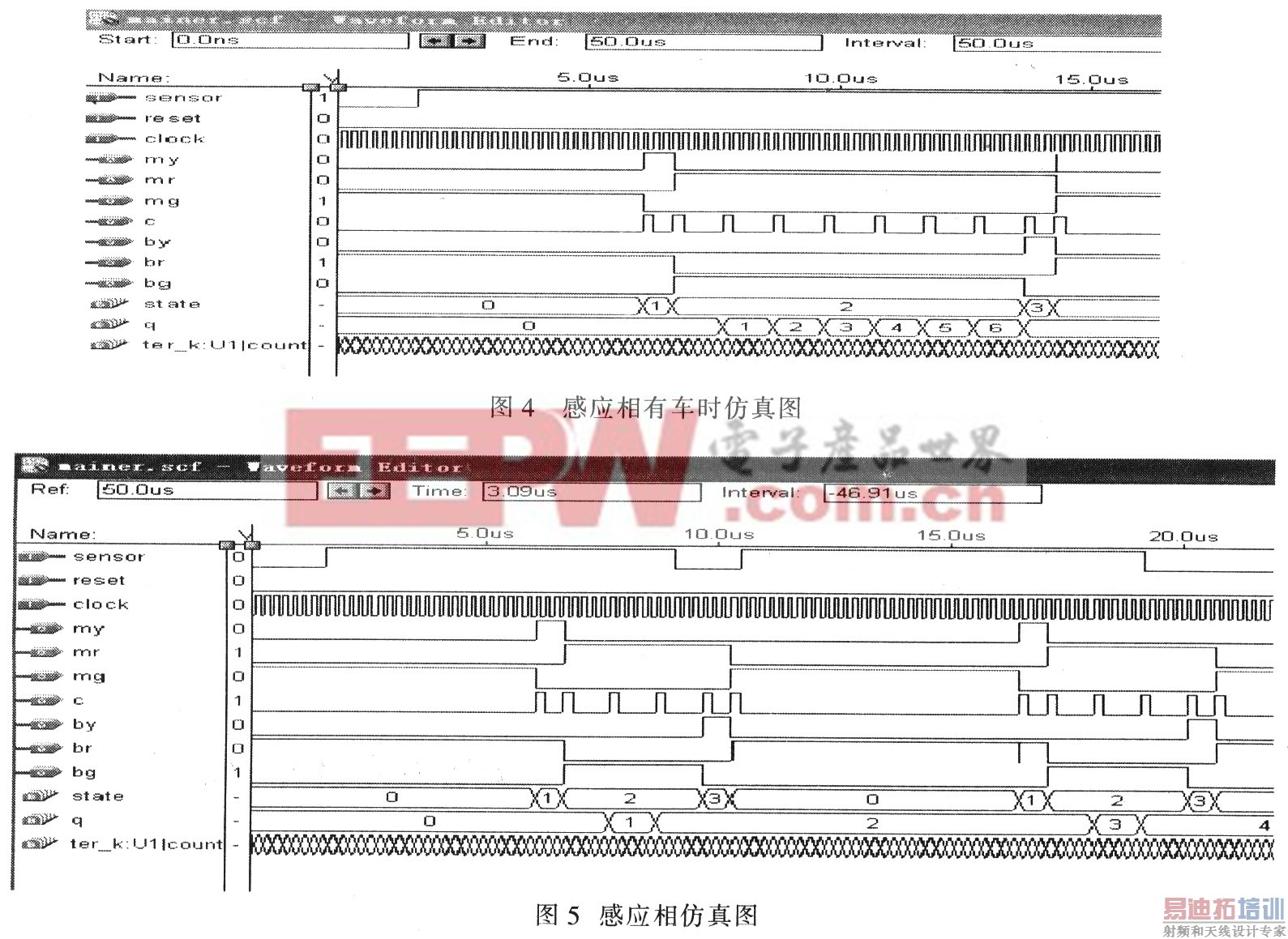
图4表明,系统可以实现感应相和非感应相的正常顺序切换。当感应相有车辆时,绿灯信号并不能立即从非感应相切换到感应相,必须等到非感应相最小绿灯时间到达后,实现通行权的转换,保证主干道的车辆通行。
图5表明,当通行权转移到感应相时,如果在经过单位绿灯延续后,没有车辆到达感应相,则通行权又转移到非感应相,这样既保证了感应相车辆的通行需求,又避免了因感应相车流量小而造成的交通资源浪费。
4 结束语
仿真结果表明,以CPLD为核心控制器,使用VHDL语言编程,可以实现单交叉路口半感应控制器的设计。使用CPLD可编程器件,灵活性好、开发周期短、抗干扰能力强。分析半感应控制方法的基本原理,并简要说明系统参数选取时应考虑的问题,并介绍用CPLD实现设计的基本方法。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
