- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于FPGA的电动机微机保护实现方法
录入:edatop.com 点击:
0 引 言
电动机内部故障的诊断与检测是电动机保护 的主要研究方向。近年来,其研究主要集中在两方 面:一方面是追寻保护理论上的突破,逐步由定性 说明到定量分析;另一方面是在实现手段上的发展,逐步由常规保护方式向基于先进信号处理方法 和微机保护技术的现代保护方式进化。本文基于 对电动机保护原理的分析和研究,利用FPGA系统 设计实现了最小二乘法数字保护算法。以FPGA 芯片为核心所设计的电动机微机保护装置,不仅克 服了传统的继电器式电动机装置的缺点,而且比普 通微机保护装置响应速度快,截断误差小。
1 电动机继电保护的原理
电动机的内部故障可以分为对称故障和不对 称故障两种。对称故障包括过载、堵转、短路等; 不对称故障包括断相、逆相、相间短路、接地故障、 三相不平衡等。根据对称分量原理,当电动机发 生对称故障时,会出现明显的过流[ 1 ] 。因此,可 以利用过电流检测来实现对称故障的诊断与保 护。当电动机发生不对称故障时,其定子电流可 以分解为正序、负序和零序分量,其中负序和零序 电流在电动机正常运行时没有或很小,一旦出现 必然表示出现了故障。因此利用电流中的负序和 零序分量来鉴别各类不对称故障具有很高的灵敏度和可靠性。 电动机的微机保护主要通过测量电量(电 流、电压及开关状态等)来监测电动机的运行状 态CONTROL ENGINEERING China版权所有,根据以上分析,电动机发生对称故障的主要特 征是出现电流幅值增大,而发生不对称故障时的 主要特征是出现负序和零序电流分量[ 2 ] 。根据 这一结论,可将电动机的保护分解成过流保护、负 序电流保护和零序电流保护三个部分。由此可基 本覆盖电动机的所有常见故障类型,并可以针对 电动机的以上三种主要保护提出电动机的综合保 护方案。
2 基于FPGA的微机保护系统硬件
根据电动机保护基本工作原理,首先必须测 出所保护元件上的电气参数,再与给定的正常标 准值进行比较,以判断元件是否发生故障或是否 运行在不正常状态CONTROL ENGINEERING China版权所有,从而确定保护装置是否应该 动作跳闸或发信号。因此,完整的保护装置应包 括三大部分:测量比较部分、逻辑判断部分、执行 部分。其各部分的逻辑关系可用图1表示。
电动机微机保护装置的硬件系统采用模块化 结构,如图2所示。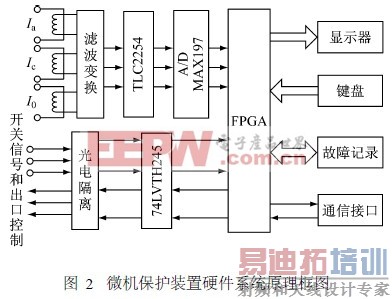
FPGA芯片代替传统单片机(MCU)成为整个 装置的核心,完成模拟信号的调理滤波、采样、模 拟/数字转换、频率和相位测量、开关量信号输入/ 输出、通信、系统计时、数据计算、逻辑判断等功能。 键盘显示模块负责人机会话。通过发光二极 管可以实时显示被保护电动机的电流、电压、频率 和断路器的状态等外部信号及装置的工作状态、 动作类型等详细信息。通过键盘可以修改整定 值、查询动作记录,并可以就地操作断路器。 摸拟量采集模块由电压形成回路、采样保持 ( S/H) 电路、模拟低通滤波器和A /D 转换器 MAX197组成,其作用是将来自现场的交流量转 换为处理器模块可以处理的数字量信号。[p]
出口模块主要负责装置内外的电气隔离,一 方面将来自处理器模块的动作、报警等信号隔离 后,送到装置外部;另一方面将来自装置外部的断 路器状态等信号进行隔离后,送到处理器模块。 根据功能控制工程网版权所有, FPGA芯片内部被划分为两部分: 算法实现模块和软核CPU (Nios)模块。前者由 VHDL模块化编写算法的实现过程,由于采用并 行结构,可以实现多路信号同时滤波;后者为软件 编写人机界面、通信协议等构建平台,并且同时根 据算法实现模块的结果,执行保护动作。在只考 虑一路信号的情况下,本系统由以下各部分组成。 (1) 码制转换器:将AD采样的输出数据转 换成准确的16进制数。
(2) 乘法器:采用阵列乘法器结构,为确保系 数精度控制工程网版权所有,系数以15位二进制数逼近,故乘法器采 用11 ×14位的结构。
(3) 累加器:由于乘法器的输出有正有负,所 以累加器也必须有加有减。通过对乘法器输出符 号的判断CONTROL ENGINEERING China版权所有,自动判断加减。
(4) 时序发生器:这是整个系统的心脏,由它 来调度什么时候什么模块做什么事。本系统采用 一个正相分频器和一个反相分频器作为时序控制 模块。
系统结构如图3所示。

3 保护算法模块
3. 1 信号处理模块
采样信号的滤波采用最小二乘法,这是一种 波形拟合方法,当预设的信号模型能充分描述被 采样信号时,该算法可以滤除信号中任意需要滤 除的分量,因此具有很好的滤波性能和很高的运 算精度。其原理是:为被采样信号预设一个尽可 能逼近的信号模型函数,并按最小二乘拟合原理对其进行拟合。
假定采样频率为1 000 Hz,被采样信号为: Ia = 10 - 10cos (2 ×pi ×f ×t) + 2cos ( 2 ×2 ×pi × f ×t) + 5 sin (3 ×2 ×pi ×f ×t) + sin ( 4 ×2 ×pi × f ×t) + 0. 5 sin (5 ×2 ×pi ×f ×t) 可见,信号有直流分量,而且谐波分量最高为 5次。以N = 11点采样进行MATLAB仿真,得到 如图4所示的波形。可以看到滤波后的正弦波 振幅等于10,所以11点采样能满足要求。
在采样频率为1 000 Hz,采样点数N = 11的 情况下,系统虽然收敛,但采样系数的离散度很 大,势必造成乘数的位宽很宽,乘法器需要耗费很 多的资源。所以可适当增加采样点数来降低离散 度。但是如果单纯增加采样点数,最小二乘法滤 波的高速特性就无法体现。因此将采样频率提升 到2 000 Hz,采样点数增加到26点(即1 000 Hz 下, 13点采样的时间) ,可以将离散度降到可接受 的程度,而且滤波速度也不会降低太多。仿真波 形和系数矩阵分别如图5和表1、2、3所示。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
