- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
连接PC的步进电机简单驱动电路(04-100)
录入:edatop.com 点击:
本文所示电路(图1)是12V、1.5A、10Kg-cm转矩的步进电机通过PC并行口连接到PC。这样做是为了使步进电机的转动自动化。此电路主要是用IC实现,这样就容易制作,具有较少的元件并且是经济的。
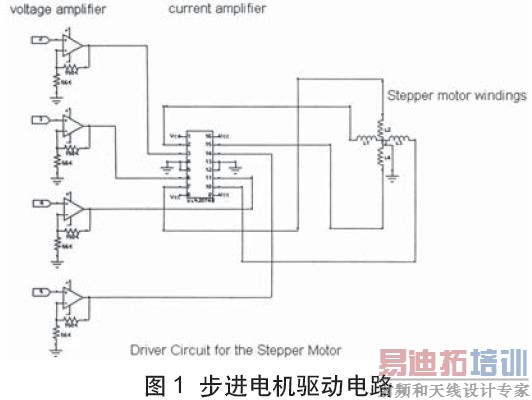
为了转动步进电机,从PC并行口(25针D型连接器)得到合适的输出位时序。并行口由25引脚组成,但此电路只用了LPT1的口378(hex)的4个数据引脚(2~5)和地引脚(25)。在图1电路中只示出25个引脚的4个引脚,接地引脚25图中未示出。顺时针转动所需输出位顺序是0001、0010、0100、1000。相应于逻辑0和逻辑1的电压电平不足以驱动这样步进电机,因此需要放大。用运放(741)实现放大,运放配置为非倒相模式,提供增益为4。在电路中连接运放的电源(VCC=+12V,VEE=-12V)未标出。达林顿晶体管阵列IC ULN2074B用于电流放大。
[p]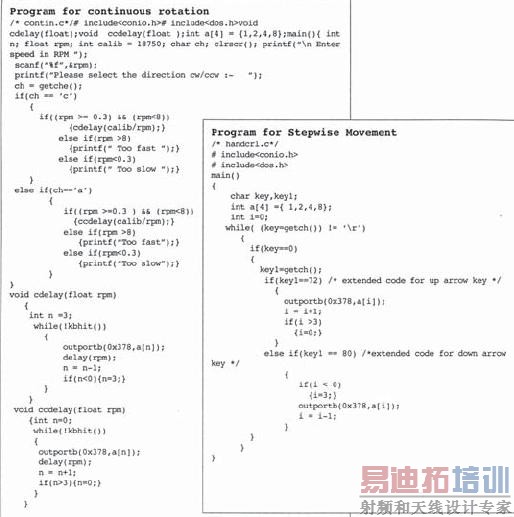
IC引脚4,5,12,13连接散热器和地。来自该IC的电压脉冲用于驱动步进电机。控制步进电机的两个C语言程序(contin.c,handcrl.c见程序清单)第1个程序(contin.c)用于电机需要连续运转时,第2个程序(handcrl.c)用于1步1步地移动电机。在第1个程序中电机可运转在用户所选速度0.3~8.0rpm范围内。电机运转方向(顺时针/反时针)也是由用户选择,在程序运行提示时按C/A键即可选择电机运转方向。程序中的变量‘Calib=18750’表示定标因数,用于定标步进电机的速度。定标因数随PC而异,在用程序前需要确定此定标因数。在handcrl.c程序中向上箭头和向下箭头按键分别用于反时针或顺时针运转电机,按一次键电机移动1步。■(冰)
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
