- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于任务的复杂武器系统可用性仿真研究
录入:edatop.com 点击:
0 引言
可用性是指产品在随机时刻需要和开始执行任务时,处于可工作和可使用状态的程度,其概率度量称为可用度。复杂的武器系统既有电子设备,又有机械、光电等设备,在故障间隔时间的分布上,除简单的指数类型外,还有正态、威布尔类型等;另外,武器系统在执行作战任务时,可能分多个任务阶段。在此评估可用性,如采用传统的数学方法评估,计算复杂,不能根据具体任务反映系统的动态可用性,也不能综合反映系统在住务期间执行任务的成功率和影响任务成功率的关键设备。故对基于任务的复杂武器系统可用性仿真进行研究。
1 仿真建模
1.1 可用性影响因素分析
考虑可用性时,通常以可用度作为分析实体。可用度可分为固有可用度、可达可用度和使用可用度。使用可用度能较好地反映作战环境下的可用性,将以使用可用度为研究实体。影响该指标的主要因素很多:1)系统的可靠性,包括系统的可靠性结构、组成系统各单元的可靠性参数;2)系统的维修性,影响要素有故障分系统的实际维修时间、保障延误时间和管理延误时间;3)系统所执行的任务,在武器系统的一个任务剖面中,通常可分割为几个任务阶段。不同的任务阶段,武器系统中参与工作的分系统的数目不一定相同(如自行高炮在停止时间射击时,其底盘分系统就可以看作非工作状态),从而整个系统的可用性也不同。
1.2 仿真模型的建立
蒙特卡洛法(Monte-Carlo)的仿真是寻找一个概率统计的相似体,并用实验取样过程来获得该相似体的近似解。系统状态(故障、工作、待命等)是时间连续、状态离散的马尔科夫过程,每一状态的转移时间都是服从某一分布的概率值,运用蒙特卡洛法产生服从这些分布的随机数,最终通过分析这些数据得到系统可用性的近似解。
1)数据初始化。仿真开始前,要明确系统所要执行的任务,划分出不同的任务阶段,可得到系统在不同的任务阶段所参与工作的设备。数据初始化主要是明确各部件的可靠性、维修性、保障性参数;使用规则(保障、维修政策);任务允许停机时间等。
2)MC试验。在每一个阶段任务中,设任一分系统状态转移的分布函数为Fi(X),可以证明Fi(X)是在[0,1]上服从均匀分布的一随机变量。通过计算机可产生服从该分布的随机数μ,令Fi(X)=μ,则反求出的x=Fi-1(μ)就是满足分布函数为Fi(X)的随机数。假设某设备的可靠性服从指数分布,则根据以上方法可得到设备的随机寿命T=-MTBF×ln(μ),其中MTBF为设备的平均故障间隔时间。
3)仿真推进。首先建立系统状态列表,以最早促使系统状态改变的事件发生的时刻为节点(如:仿真开始首先产生各部件的故障时刻Rti,找出最早的故障时刻Rtm=min(Rti),则可以认为部件m在该次仿真中发生了故障,然后针对该部件产生其维修时间),确定仿真步长。当满足仿真次数后,跳至下一个任务阶段,按照以上同样的方法确定仿真的步长,推进仿真时钟,依此直至仿真结束。
4)统计输出。主要用来建立各种参数的统计输出模型和给定置信水平的置信度模型,是可用性仿真的核心和目的。统计输出主要包括:
(1)使用可用度
使用可用度可以描述为系统能工作的时间和整个任务时间的比值,在仿真中可以用式(1)计算:

其中n为总仿真试验的次数;m为一次任务中所分的任务阶段总数;T为系统的任务时间;Tij'为第i次仿真试验中第j个任务阶段的系统停机时间。[p]
(2)任务可靠性
任务可靠性计算如式(2):

任务是否成功取决于设备故障引起的系统停机时间是否小于任务的允许停机时间,若小于,则任务成功,反之,任务失败。其中,n为总仿真试验的次数;Ni表示第i次仿真试验中系统执行任务是否成功,若成功,Ni=1,若失败,则Ni=0。
(3)基于任务失败的关键设备。发生了故障且修复时间大于任务的允许停机时间的设备即为基于任务失败的关键设备。
(4)仿真结果的精度估计。运用蒙特卡洛法对可用度的仿真,当置信水平为0.95时,仿真误差可由式(3)得到:
1.3 仿真步骤及流程
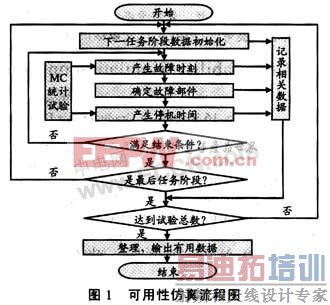
可用性仿真按任务阶段的先后顺序进行,在每个阶段内根据给定的模型进行状态模拟,并以准则判断该任务阶段的仿真是否结束,若结束,则跳到下一个任务阶段,若满足总的仿真次数后,则跳出,否则开始下一次的仿真试验。具体仿真流程如图1。
2 实例分析
某自行高炮配属某部,负责对空安全。任务分为3个阶段,首先向集结地域隐蔽行军,持续10h,此时敌机平均到达率可近似当作零处理,系统允许停机时间为0.8h;其次在集结地域待命,持续3h,敌机平均到达率为3批/h,系统允许停机时间为敌机的到达空隙时间;最后是展开阶段,持续时间2h,敌机平均到达率为6批/h,系统允许停机时间为零。其各分系统可靠性、维修性数据如表1。

为使可用性的仿真模型算法简单并不失一般性,作如下说明和假设:
1)自行高炮系统中的目标指示雷达、火力、火控、底盘分系统成串联结构,各分系统的故障相互独立,在同时刻不可能有2个以上分系统同时故障。
2)敌机的到达率服从泊松分布(设其期望值为λ),认为在交战阶段自行高炮射击次数服从泊松分布。设敌机到达一个批次,只射击一个架次,每架次射击2个长点射,则有火炮的平均射击率为2λ。
3)故障出现就立即维修,即认为故障修复的延误时间为零。
4)自行高炮行军的平均速度按40km/h计算,底盘系统的可靠性分布函数为威布尔型,其形状参数m=2,可知其平均故障间隔时间MTBF=12h,根据公式![]() ,查表可得其特征寿命参数η=13.5。
,查表可得其特征寿命参数η=13.5。
5)统一量纲的说明。底盘系统通过4)可把距离单位归到时间的单位上;对于火力系统,敌机的到达时刻可看作它的射击时刻,故火力系统的故障时间可通过敌机的到达时间确定。至于火力系统的可靠性参数MRBF,只是用来确定在自行高炮的1次射击后,其累积发射弹数是否大于该次射击中火力系统所允许的随机射弹数,不涉及统一量纲的问题。
显然,在第l阶段中,可认为自行高炮的火力分系统没有参与工作;第2阶段中,可认为底盘分系统没有参与工作;最后阶段中,系统的所有分系统都参与工作。[p]
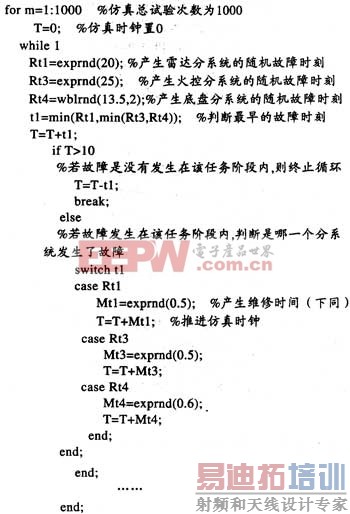
仿真过程运用MATLAB编程,部分代码如下(仿真的第1任务阶段):
仿真结果如表2、表3。

由表2可知,系统的使用可用度较高,但任务可靠性却并不高。由表3可知,火力分系统的故障共158次,故障率较高;而且致使任务失败113次,明显高于其它分系统,也是致使任务失败的主要因素。由此,在该次的作战任务中,在配件、保障、维修等方面应该优先考虑火力系统。
该次仿真根据式(3),在置信水平为0.95的前提下,得到可用度仿真误差为±0.0092。
3 结束语
该可用性仿真模型直观清晰,编程方便,能很好地解决在不同的作战任务且任务多阶段情况下系统可用性的动态评估。不仅可以预测现有装备在执行任务时的使用特性,发现影响任务完成的关键设备,为装备的维修方制定策略提供依据,为指挥员制定正确的行动计划提供参考,而且可以在新装备的设计初期,权衡各部件的设计参数,更科学地进行可靠性、维修性分配。该模型和方法对提高现有装备的战斗力有重要意义。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
