- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
PCBA加工元件自动检测技术简介(上)
录入:edatop.com 点击:
摘要:表面安装PCB板的自动检测是保证质量、减少制造废品浪费和返工的要求。本文研究定位和识别SMD检测图像中的多个对象的方法。表面安装器件检测的主要难点之一是元件放置的检测。元件放置缺陷如漏贴、偏位或者是错误的旋转元件是主要缺陷必须在回流焊之前或之后进行检测。本文的重点在于定位多对象的对像识别技术;使用灰色模型匹配来为一组元件创建通用的模板。研究中使用标准化互相关模板匹配方法并对限制搜索区域以减少计算量的方法进行测试。查找模板位置的方法使用了一个遗传算法,性能优越。最后列出了对典型的PCB图像的实验结果。
关键词:PCB制造;元件检测;模板匹配;遗传算法
1 引言
视觉系统被用于检测PCB贴片缺陷,并出现了很多不同的检测方法。表面安装技术使用自动设备高速的进行高元件密度PCB板的生产。检测被用于检查在生产过程中可能出现的可能的缺陷。
单面表面安装板的主要生产步骤如图1所示。步骤包括在PCB板上放置焊膏、在正确位置放置元件和将PCB板放入烤炉焊接元件到焊盘上(回流焊)。双面板需要在一个更复杂的装配过程中将穿板元件插到板上。用粘合剂在板的两面固定SMD元件,然后使用峰波焊将元件焊接在板上。
元件的放置是自动“取-放”的过程,使用一个真空管来从喂料带上拾取元件并将元件放置到板上。真空吹气的时候可能存在元件没有放下来(吹气太弱)或者元件被吹离位置(吃气太强)的情况;X-Y平台机械状况不好时会导致位置偏移的问题。元件放置缺陷包括:
(1)漏贴;
(2)偏位
(3)偏转
回流焊过程中也会因为焊料特性和气体释放作用引起元件的升起和翻转。因此线和离线检测
被用于PCB板的生产过程中,如图1所示。
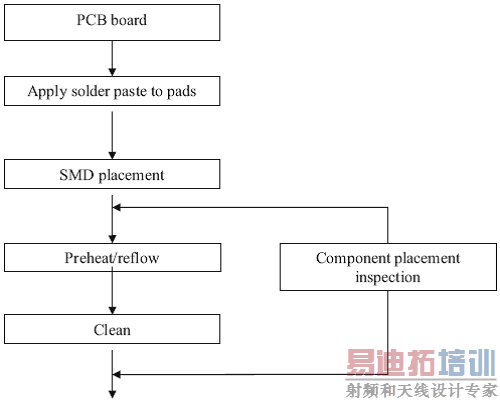
图1 SMD电路板生产过程
本文研究在图像中定位多对象(如贴片电阻)的自动对象识别技术来识别它们的位置和旋转。为位置质量检查做好准备。设计的方法基于模板匹配和遗传算法搜索,其中使用了一个通用灰色模型模板来识别对象。文章的第二章讨论了模板匹配方法及其在对象识别中的使用。第三章讨论了怎么对一组元件建立一个通用模板并产生一个最大可能搜索区域来验证它的使用。第四章描述了怎样缩小搜索区域以减少计算量。在第五章介绍了在一个源图像搜索多对象的遗传算法解决方案。第六章讨论了方法的应用和结果。最后做了结论。
2 模板匹配
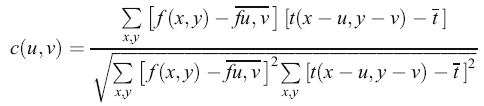
模板匹配是一个在一个源图像中识别与另一个称之为模板图像的较小的子图像匹配的特征的方法,经常被用于对象识别。基本的模板匹配算法是:模板图像在源图像上移动并在每个位置计算灰度相关度,灰度相关度使用像素亮度来估计模板图像和源图像区域之间的相似度。一般地,在模板匹配算法中使用标准化互相关(NCC)如下式:
 (1)
(1)
其中f(x,y)是源图像中灰阶像素亮度矩阵;
 是与模板图像相一致区域的源图像的平均灰阶亮度值;
是与模板图像相一致区域的源图像的平均灰阶亮度值;
t是模板图像的灰阶像素亮度矩阵;
 是模板图像的灰阶像素亮度平均值;
是模板图像的灰阶像素亮度平均值;
c(u, v)的值范围从-1到1并且原图像和模板图像的比例变化与其无关。c(u, v)的最大值的地方即模板和源图像最匹配的地方。为了使互标准化相相关可以检测有旋转的模式,需要在每个角度进行新的模板匹配搜索,这样增加了计算量。标准灰阶模板匹配方法用一个单一模板来搜索一个单独的元件。定位和识别表现出不同灰阶的相似元件需要一个模板模型化方法。
3 灰色模型模板
图2是一个7475集成芯片的PCB源图像和六个贴装电阻。要求是要将7475下面的6个元件进行定位和识别,6个元件是5110或1001贴片电阻。注意到其中一个5110电阻相对其它旋转了180度。6个元件的大小和形状相同,但灰度值不一样,因为元件上面的印刷字符不一样,及元件的生产厂家不一样产品颜色也有区别等。不一致的照明会在原图像产生阴影区域。
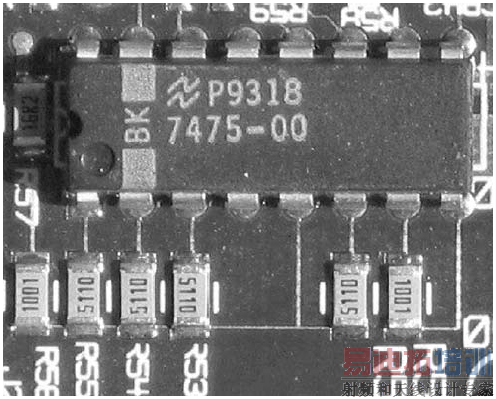
图2 PCB贴装元件图像
方法中使用一组元件的模板图像来建立一个灰色模型模板。这个通过线性组合一组模板图像来平均每个元件图像之间的灰阶亮度值的统计差异。方法从源图像中的六个元件中提取相同大小的模板图像并计算每个图像对应像素值的平均值。图3显示使用从图2中提取六个元件的模板图像创建的通用灰色模型模板图像。
通用模板可以用来搜索区域的最大可能性图像如图4所示。最大可能性X可以通过下式计算:
 (2)
(2)
其中 是协方差矩阵的逆矩阵。协方差矩阵根据对应于模板矩阵的源图像区域像素亮度矩阵及模板像素亮度矩阵计算。在方程中[f-t]转置矩阵是1Xn矩阵,乘以 (nxn矩阵)得出一个1Xn矩阵。再将这个矩阵乘以nx1的[f-1]矩阵得到一个数量值X。X值的范围为0到1。X趋于0,代表模板和对应源图像匹配可能性很高。
是协方差矩阵的逆矩阵。协方差矩阵根据对应于模板矩阵的源图像区域像素亮度矩阵及模板像素亮度矩阵计算。在方程中[f-t]转置矩阵是1Xn矩阵,乘以 (nxn矩阵)得出一个1Xn矩阵。再将这个矩阵乘以nx1的[f-1]矩阵得到一个数量值X。X值的范围为0到1。X趋于0,代表模板和对应源图像匹配可能性很高。
在源图像上移动图3所示的通用模板并在每个位置计算协方差和使用式2计算最大可能性,便产生了最大可能性图像。同时也创建对模板旋转一定角度的最大可能性搜索区域图像。图4显示了许多黑色的区域,这些区域最大可能性接近零,表示和要定位的元件在图像上的位置匹配可能性很高。六个黑色区域对应贴片电阻的位置,可见计算的通用的模板能够很好的在一个图像上查找多对象。

图3 通用模板
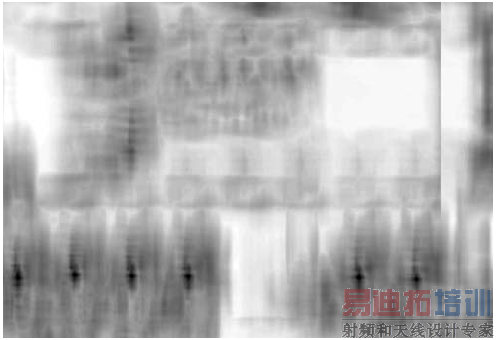
图4 最大可能性图像
4 限制搜索区域
在源图像定位和识别多对象需要模板搜索。在标准的方法中,在源图像的每个像素中应用模板,使用标准化互相关计算相似系数。虽然标准化互相关是应用于在图像中检测模式的很好的技术,但是其基于加法和乘法操作,这使得在搜索整个图像是很费计算时间。如果预先知道一个元件在PCB上理想的中心位置(目标点),那么就可以将搜索限制在以目标点为中心的目标区域。使用这种方法能够快速搜索,但是当元件错贴时也更容易出错(找不到对象)。
一个元件可以在板(源图像)上任何位置被定位。如果使用“拾取-放置”移动机器来定位和移除错件,那么需要对整个图像进行搜索。源图像的边缘滤波可以用来将搜索区域限制在边缘位置。通过只在边缘位置搜索图像,减少NCC需要执行的计算量。明显和不明显的边缘都需要检测,以便能够进行精确的模板定位。Canny边缘算法,对比其它边缘滤波如Sobel,够很好的检测不明显的边缘。Canny滤波是对其它边缘检测方法的改进。Canny方法查找边缘时,首先使用高斯滤波平滑图像,然后执行梯度计算(gradient calculation),使多像素宽边缘减少为单像素边缘(非最大压缩non-maximum suppression),应用低的和高的边缘强度阈值,最后选择所有在低阈值之上和在高阈值之上的边缘相连的边缘(finally accepting all edges over the low threshold that are connected to edges over the high threshold)。图5显示了Canny边缘滤波后的源图像。
从源图中像中提取一个所有边缘位置的向量并使用通用灰色模型模板对每个边缘点计算NCC系数。如图6所示,图中有6个峰值对应创建灰阶模板的6个电阻。当执行相似计算时,将模板图像的左上角作为参考点。
边缘检测也具有对照明条件及对比度变化的鲁棒性好的优点。在边缘检测之前,使用直方图均衡化(Histogram equalization)作为预处理步骤,来提高动态范围、对比度和最大化源图像在没有统一照明时的熵(增加信息量)为了标准化在不同照明下的图像,将直方图均衡化分别应用于源图像元件的R、G、B图像,然后再重新叠加。需要注意的是,因为我们的方法是基于一个从相同大小的子图像撮的通用灰色模型模板图像的,任何直方图均衡化操作必须在创建通用模板之前应用。
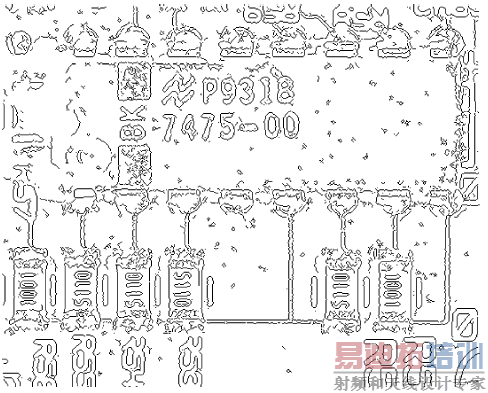
图5 Canny边缘检测
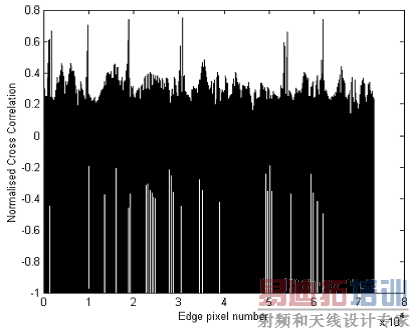
图6Canny边缘象素的标准化互相关系数
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:SMT贴片加工钢网用途及特点
下一篇:PCBA生产用电抛光钢网原理简介
射频和天线工程师培训课程详情>>
