- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
眼 基本知识介绍
录入:edatop.com 点击:
随着数据速率超过Gb/s水平,工程师必须能够识别和解决抖动问题。抖动是在高速数据传输线中导致误码的定时噪声。如果系统的数据速率提高,在几秒内测得的抖动幅度会大体不变,但在位周期的几分之一时间内测量时,它会随着数据速率成比例提高,进而导致误码。新兴技术要求误码率(BER),亦即误码数量与传输的总码数之比,低于一万亿分之一(10-12)。随着数据通信、总线和底板的数据速率提高,市场上已经出现许多不同的抖动检定技术,这些技术采用各种不同的实验室设备,包括实时数字示波器、取样时间间隔分析仪(TIA)、等时取样示波器、模拟相位检波器和误码率测试仪(BERT)。为解决高数据速率上难以解决的抖动问题,工程师必需理解同步和异步网络中使用的各种抖动分析技术
本文重点介绍3 Gb/s以上新兴技术的数据速率。低于3 Gb/s的实时示波器可以捕获连续的数据流,可以同时在时域和频域中分析数据流;在更高的数据速率上,抖动分析要更具挑战性。本文将从数字工程师的角度,介绍应对SONET/SDH挑战的各种经验。
抖动分析基本上包括比较抖动时钟信号和参考时钟信号。参考时钟是一种单独的黄金标准时钟,或从数据中重建的时钟。在高数据速率时,分析每个时钟的唯一技术是位检测和误码率测试;其它技术则采用某种取样技术。
如图1所示,眼图是逻辑脉冲的重叠。它为测量信号质量提供了一种有用的工具,即使在极高的数据速率时,也可以在等时取样示波器上简便生成。边沿由‘1’到‘0’转换和‘0’到‘1’转换组成,样点位于眼图的中心。如果电压(或功率)高于样点,则码被标为逻辑‘1’;如果低于样点,则标为‘0’。系统时钟决定着各个位的样点水平位置。
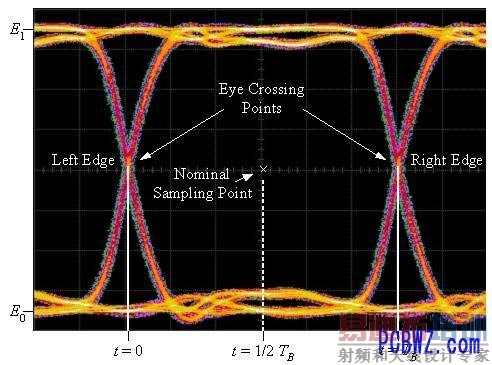
图1: 具有各项定义的眼图
E1是逻辑‘1’的平均电压或功率电平,E0是逻辑‘0’的平均电压或功率电平。参考点t = 0在左边的交点进行选择,右边的交点及其后是位周期TB。
Eye Crossing Point: 眼图交点
Left Edge: 左沿
Right Edge: 右沿
Nominal Sampling Point: 标称样点
幅度噪声可能会导致逻辑‘1’的电压或功率电平垂直波动,低于样点,导致逻辑‘1’码错误地标为逻辑‘0’码,即误码。抖动描述了相同的效应,但它是水平波动。抖动或定时噪声可能会导致码的边沿在水平方向中的样点内波动,导致错误。从这种意义上讲,抖动定义为一个数字信号在有效时点上距理想时间位置的短期变化。脉冲电压电平的波动源自不需要的调幅(AM)。类似的,转换的定时波动可以描述为脉冲相位波动、不需要的调相(PM)或相噪。
在系统器件的定时方面,数据通信和电信技术并不相同。在同步系统中,如SONET/SDH,系统器件同步到公共的系统时钟。在信号通过网络传送时,不同器件生成的抖动会通过网络传播,除非对器件中传送的抖动提出严格的要求,否则抖动可能会无限制地提高。在异步系统中,如千兆位以太网、PCI Express和光纤通道,器件定时由分布式时钟提供或从数据转换中重建的时钟中提供。在这种情况下,必须限制器件生成的抖动,但从一个器件转移到另一个器件上的抖动则不太重要。不管是哪种情况,底线是系统的工作性能如何,即误码率。
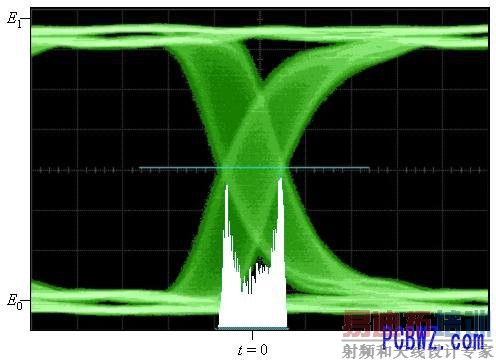
图2: 抖动大的眼图的交点,直方图是一个像素宽的交点块投射到时间轴上的投影
器件生成的固有抖动称为抖动输出。其主要来源可以分为两个:随机抖动(RJ)和确定性抖动(DJ)。可以把抖动看作从理想定时位置的、逻辑转换的定时变化,如图2中的直方图所示。这一分布显示了被不同抖动源模糊的理想定时位置。抖动分布是RJ和DJ概率密度函数的卷积。随机抖动源自各种随机流程,如热噪声和散粒噪声,其假设遵守高斯分布,如图3a所示。由于高斯分布的尾部扩展到无穷大,RJ的峰到峰值没有边界,而RJ的均方根则收敛到高斯分布的宽度上。
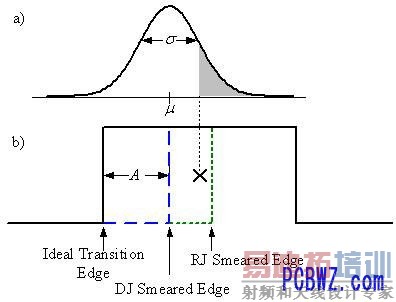
图3: 单个时点的抖动、正弦周期抖动和随机抖动相结合,导致误码的实例
Ideal Transition Edge: 理想的转换边沿
RJ Smeared Edge: RJ模糊的边沿
DJ Smeared Edge: DJ模糊的边沿
确定性抖动(DJ)包括占空比失真(DCD)、码间干扰(ISI)、正弦或周期抖动(PJ)和串扰。DCD源自时钟周期中的不对称性。ISI源自由于数据相关效应和色散导致的边沿响应变化。PJ源自周期来源的电磁捡拾,如电源馈通。串扰是由捡拾其它信号导致的。DJ的特色特点是,其峰到峰值具有上下限。DCD和ISI称为有界相关抖动;Pj和串扰称为不相关有界抖动;RJ称为不相关无界抖动。
识别不同类型的抖动来源,可以减少设计层次的问题,因为不同的器件以不同的方式生成抖动。例如,发射机主要生成RJ。外部调制的激光发射机生成的大多数抖动是由激光器和主参考时钟的随机抖动导致的。相反,接收机生成的绝大部分抖动是DJ,这源于导致ISI的前置放大器和后置放大器连接的AC耦合等因素。直接调制激光发射机受到RJ和DJ的影响。介质采用两种方式:光纤从色散中增加DJ,从散射中增加RJ;传导介质从有限带宽中增加DJ,与低频和多个反射相比,高频的衰减要更高。
很重要的一点是,要理解抖动分布是由所有抖动源的卷积赋予的。为直观地认识抖动,我们考察一下从‘0’到‘1’的逻辑转换,如图3b所示。标有‘x’的样点距理想转换边沿右面位周期的一半。现在,增加幅度为A的正弦DJ。在波的顶部,边沿从理想边沿朝着样点移动距离A。然后,根据高斯分布模糊边沿的位置,增加RJ。如果边沿移到样点的右面,那么逻辑‘1’码被错误地标为‘0’。在这种情况下,码边沿抖动经过样点的部分时间决定着BER。如果已知抖动原因,则可以计算BER。在本例中,抖动是RJ及PJ的一个来源,PJ移动边沿距离A及呈高斯分布的区域(图3a中的阴影部分),移到样点右面的概率决定着误码概率。这展示了RJ和DJ分布怎样一起卷积,即一种原因的效应叠加在另一种原因的效应之上,直到考虑了所有原因。
衡量系统功能的最终尺度是BER。抖动分析的目标是确定抖动对BER的影响,并保证系统BER低于某个最大值,通常是10-12。BER(T)由码型发生器、误码分析仪和系统时钟组成。数据发生器把码型传送到系统器件上。器件处理码型,把结果传送到误码分析仪,误码分析仪在已知码型上同步,计算收到的码数,确定哪些码接收错误,计算BER。图4是BER图,它是样点时间位置BER(t)的函数,这个图称为BERT扫描图或浴缸曲线,简而言之,它在相对于参考时钟给定的额定取样时间的不同时间t上测得的BER。参考时钟可以是信号发射机时钟,也可以是从接收的信号中恢复的时钟,具体取决于测试的系统。图4的时间轴与图1相同,两侧与眼图边沿相对应,样点位于中心。BER一定时,曲线之间的距离是该BER上的眼图张开程度。在样点接近交点时,抖动会导致BER提高到最大0.5。完整的BERT扫描测量是直接衡量BER一定时眼图张开程度的唯一方法。遗憾的是,完整的BERT扫描图需要很长的时间,如在5 Gb/s时需要30分钟。通过集中在眼图边沿进行部分BERT扫描,可以在几秒内,在10-15%的范围内保守地估算任何BER时的眼图张开程度。估算技术是一种近似方式,它对RJ和DJ概率分布去卷积,然后或多或少地使用高斯RJ,根据图3所示计算BER。关键在于,由于DJ有界、RJ是高斯分布,卷积的分布尾部在BER下限中遵守高斯RJ分布。从高斯分布中推导出的函数,称为互补误差函数,拟合到BERT扫描平滑的下降沿上。然后可以推断拟合的函数,直到任何BER值,以估算眼宽。
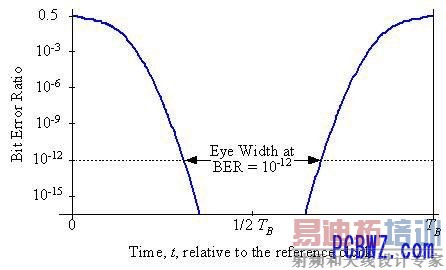
图4: BER(T)扫描或浴缸曲线,其中误码率是样点时间位置的函数
Bit Error Rati 误码率
Eye Width at BER = 10-12: BER = 10-12时的眼宽
Time, t, relative to the reference clock: 相对于参考时钟的时间t
等时取样示波器上显示的眼图由从多个不同逻辑脉冲上取样的数据组成。“轨迹”由参考时钟提供的触发之后的顺序时间上采集的数据点组成。显示的是一个两维直方图,如图1和图2所示。某个点上的颜色或亮度用来衡量该电压或功率上相对于触发信号的时间上发生的样点数量。取样示波器可以把一个像素宽的交点块投到时间轴上,构成眼图交点直方图(图2),测量抖动输出。眼图交点直方图近似计算信号抖动输出的概率分布函数。
在BERT扫描情况下,通过对RJ和DJ近似去卷积,可以从眼图交点直方图中估算BER,这基于这样一个事实,即在远离交点时,抖动分布主要取决于高斯RJ。把直方图的尾部与高斯分布匹配起来,提供了一个函数,然后可以在眼图中推断这个函数,并用来估算BER一定时的眼宽。数据集合和分析与高速取样时间间隔分析仪中基本相同。交点直方图拟合的宗旨与拟合BERT扫描的宗旨类似,但BERT扫描技术的速度和精度都要高得多。通过拟合直方图获得的某种高斯形状在一定程度上受到随机波动的影响;BERT扫描只取决于数据转换是否在样点上波动,而不取决于其波动的精确时间位置。因此,使用BERT进行测量要比低概率波动强健得多,后者的拟合可能会偏向交点直方图。部分BERT扫描的拟合速度要比交点直方图的拟合速度快得多,因为BERT数据集是在完整的数据速率上采集的,而直方图则是通过以低得多的速率对信号取样构建的。
对于高斯RJ能否精确地描绘交点直方图或BERT扫描的低BER的尾部,人们还存在争议。这种真正的随机流程会导致抖动,抖动遵守高斯分布并不存在问题,但这些流程可能并不是抖动分布尾部的主要因素。问题在于,多种小的效应之和,会构成接近高斯的分布。统计理论的中心极限定理体现了这一点:数量无穷大的小流程之和会遵守高斯分布。这意味着多个低幅度的DJ流程会卷积到一个仅在钟形曲线中心、而不是尾部接近高斯分布的分布函数。但是尾部才是高斯假设对估算BER最重要的地方。可能在某些情况下,真正的RJ只占似乎是高斯分布的抖动的一小部分。如果是这样,那么用来从拟合快速BERT扫描测量和直方图拟合中估算BER所使用的技术,可能会在总体上高估实际BER。尽管近似方法总是要小心出现错误,但在高斯分布没有很好地描述尾部时,它可能会迫使制造商设计的抖动余量超过必要的水平。幸运的是,通过以BER = 10-12的误码率水平执行全面的BERT扫描测量,进而可以把拟合技术与整个测量进行对比,检查这种情况并不难。
在抖动分析中,有两个不同的频域:时钟频率定义了时钟信号的额定交叉时间,抖动频率则是相对于额定交叉时间,时钟交叉的时间位置变化的频域。例如,周期抖动会导致时钟信号变化大约额定的时钟交叉量。结果,数据信号的抖动频率限于低于时钟频率的一半。
分析解调的抖动信号或相噪是一种强大的诊断技术。可以使用相位检测器解调相位,在频谱分析仪的抖动-频率域中或在示波器上的时域中进行分析。由于相位检测器只能解调时钟信号,要求专门的时钟恢复(CR)电路来分析数据信号。为把数据上的抖动传送到恢复的时钟中,而且没有失真,CR必须有:
1. 低抖动输出 – CR抖动提高了本底噪声,因为CR抖动的响应可能会干扰器件的抖动,而不能完全减去抖动响应;
2. 平坦的转函,这样抖动信号不会失真;
3. 带宽要足够宽,能够在相关的抖动-频段中传送抖动。
带宽标准限制着基于相位检测器的系统的分析范围。在SONET/SDH等应用中,数据恢复电路的带宽很好地界定了滚降频率,相位检测器电路可以设计成适合应用的带宽。
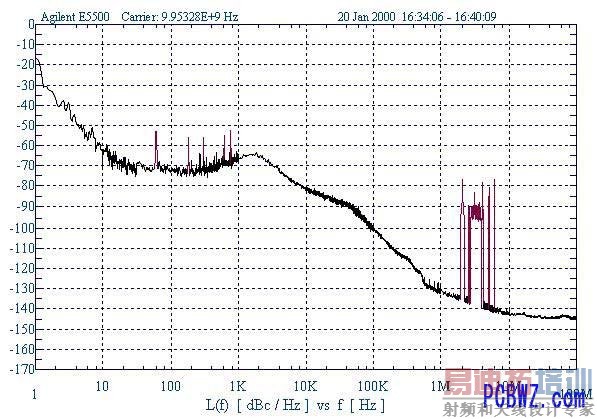
图5: 相噪频谱密度/单边带相噪图
图5是时钟信号的相位频谱密度:每个单位的抖动-频率带宽的均方相位变化。它等于单边带(SSB)功率频谱。在图5中,RJ提供了频谱中的连续背景,可以理解为闪烁、随机漂移和白噪声成分。通过分析相噪频谱,可以识别和分隔不同类型的DJ:在图5中,在低抖动-频率上,60 Hz拾波及其谐波上升到连续背景上方的杂散信号,大约2 kHz上的宽拐角是锁相环滚降点,5 MHz周围的PJ非常明显。通过在希望的带宽上求积分,可以从频谱中提取rms抖动。
通过使用具有专用相噪功能的频谱分析仪,还可以从时钟信号的频谱中提取SSB频谱。与相位检测相比,这种方法有两个系统问题。首选,频谱不能区分幅度噪声和相位噪声。低噪声、高带宽的限制放大器可以降低这种效应。第二,频谱分析仪的滤波形状允许载波附近的某些高幅度噪声泄漏出去。另一方面,使用频谱分析仪提取SSB频谱的优点是带宽高。因此,结合使用抖动频率带宽高达约100 MHz的相位检测器与具有覆盖最高时钟频率一半的相噪专用功能的频谱分析仪,可以提供一种强大的抖动诊断工具。
在较低的数据速率下(如B < 3 Gb/s),可以使用实时示波器捕获连续数据流的一个长段。数据集由段中每个数据转换的带有时间标记的交点组成。与取样技术或BERT扫描中的数据不同,数据可以在时域和抖动频率域之间来回变换。可以在抖动-频率域中识别确定性流程,与相噪分析技术相比,可以隔离时域中的效应,而相噪分析技术则测量功率频谱,而没有完整的合成幅度。但是,实时示波器上的抖动分析也有自己的缺点:数据集合的数字转换分辨率有限,数据段的长度受到示波器内存深度的限制。内存深度有限还具有矩形窗口效应,导致抖动频谱中窄的空信号,限制可以观察到的最低抖动频率。将不能分析周期长于捕获长度所发生的抖动效应。
在同步系统中,在通过系统传播时,抖动会在不同器件之间提高。抖动转函检定器件怎样作为抖动频率的函数传播抖动,可以用来理解器件的频响,而不管它是否是在SONET/SDH中指定的。规定幅度和频率的正弦抖动信号适用于传送到器件上的数据,将在应用的抖动频率上测量这些器件的输出抖动幅度,如基于相位检测的测试仪。抖动转函应小于或接近低抖动频率上的元素,其中接收机对抖动更加强健,而在规定的接收机滚降频率上,则要远远低于抖动频率上的单位。
抖动容限衡量接收机在不降低BER性能的情况下对抖动的容忍能力。它是用于器件的、导致相当于灵敏度降低1 dB的正弦抖动的幅度。在测试时,首先在没有增加抖动的情况下测量器件的BER,然后降低信号功率,直到误差始点或直到超过规定的BER。然后把信号功率提高1 dB,并增加正弦抖动,传送信号。得到的抖动幅度就是该频率上的抖动容限。容限要求符合一个模板,其中对低频幅度大,对高频幅度小。
SONET/SDH已经很好地定义了频带有限的抖动输出、转函和容限要求,但许多高速异步技术的抖动规范仍在发展。对发射机,10 GB以太网规范限制着发射机色散代价(TDP)。TDP是必须增加到色散链路中的发射机上的衰减水平,以把BER提高到非色散链路中的参考接收机的水平,其样点波动范围为5 ps。TDP是一种限制抖动输出的方法。对接收机,将执行受压眼图接收机灵敏度测试,检验接收机在接收可以允许的最坏情况信号时,能否在低于10-12的BER水平上运行。测试信号设计成模拟各种极限条件,包括RJ、DCD、ISI和PJ。与SONET/SDH中一样,抖动容限测试作为增加的抖动-频率的函数,但它还包括其它极限条件。
抖动测量的精度受到本底噪声和复现度的限制。本底噪声是系统生成的平均抖动,有时称为测试设备固定误差,取决于测量的带宽。噪声可能会波动到平均值以上,测量结果可能会波动到实际值之下,本底噪声和复现度相结合,决定着测试仪可以观察到的最低抖动。经验法则是可以观察到的最低抖动比本底噪声之上的复现度低两个单位。
不同的抖动检定方法具有不同的优点,其提供的结果可能很难比较,因为它们通常系统地测量不同的项目;但是,良好定义的一致性测试必须允许进行普遍比较。SONET/SDH是比较成熟的抖动标准,它可以在不同测试集合的本底噪声和复现度指标内部,比较单独的频带有限的抖动输出、转函和容限指标。但是,新兴技术中测试方法的激增,鼓励粗心大意地比较衡量不同数量的结果。例如,在BERT扫描中,从眼图张开测量中得到的总抖动完全不同于简单的峰到峰抖动测量。比较微妙的比较是把从BERT测量中推断得出的BER与BERT和取样示波器或TIA上测量的结果分开。在这两种情况下,通过拟合分布中BER低的尾部,可以近似地进行RJ/DJ去卷积,但去卷积近似计算中测量的系统不确定性,即外部效应和测得的分布之差很难量化。问题在于,测量结果的比较精度取决于其不确定性和所有不确定性,必须考虑所有不确定性,而不管是固有的不确定性(如本底噪声和复现度)还是相对的不确定性(如流程差异)。
在同步系统器件和异步系统器件中,在诊断方面,抖动测量的目标是识别导致错误的事件;在一致性测试方面,则是检验器件是否生成可以接受的误码率。在高速数据速率上检定抖动的基本方法有三种,即取样、实时相位检测和测量BER。取样技术可能会漏掉概率低的或瞬时的事件,但会在时域中有效地以可视方式表明系统性能;相位检测的频带有限,但在抖动-频率域中提供了杰出的诊断信息;误码率指标测试每个位,提供了基础的相关质量BER。各种标准正在不断发展,可以在整个眼图中迅速近似获得BER。在RJ占分布尾部主要部分的假设条件下,通过近似去卷积把RJ和DJ分开的这种常用方法是存在争议的,在更好地理解抖动来源和分布时,这种方法将向前发展。随着业内更详细地研究新兴技术,抖动分析技术和一致性测试要求将象此前的SONET/SDH一样趋于稳定和成功。
本文重点介绍3 Gb/s以上新兴技术的数据速率。低于3 Gb/s的实时示波器可以捕获连续的数据流,可以同时在时域和频域中分析数据流;在更高的数据速率上,抖动分析要更具挑战性。本文将从数字工程师的角度,介绍应对SONET/SDH挑战的各种经验。
抖动分析基本上包括比较抖动时钟信号和参考时钟信号。参考时钟是一种单独的黄金标准时钟,或从数据中重建的时钟。在高数据速率时,分析每个时钟的唯一技术是位检测和误码率测试;其它技术则采用某种取样技术。
如图1所示,眼图是逻辑脉冲的重叠。它为测量信号质量提供了一种有用的工具,即使在极高的数据速率时,也可以在等时取样示波器上简便生成。边沿由‘1’到‘0’转换和‘0’到‘1’转换组成,样点位于眼图的中心。如果电压(或功率)高于样点,则码被标为逻辑‘1’;如果低于样点,则标为‘0’。系统时钟决定着各个位的样点水平位置。
图1: 具有各项定义的眼图
E1是逻辑‘1’的平均电压或功率电平,E0是逻辑‘0’的平均电压或功率电平。参考点t = 0在左边的交点进行选择,右边的交点及其后是位周期TB。
Eye Crossing Point: 眼图交点
Left Edge: 左沿
Right Edge: 右沿
Nominal Sampling Point: 标称样点
幅度噪声可能会导致逻辑‘1’的电压或功率电平垂直波动,低于样点,导致逻辑‘1’码错误地标为逻辑‘0’码,即误码。抖动描述了相同的效应,但它是水平波动。抖动或定时噪声可能会导致码的边沿在水平方向中的样点内波动,导致错误。从这种意义上讲,抖动定义为一个数字信号在有效时点上距理想时间位置的短期变化。脉冲电压电平的波动源自不需要的调幅(AM)。类似的,转换的定时波动可以描述为脉冲相位波动、不需要的调相(PM)或相噪。
在系统器件的定时方面,数据通信和电信技术并不相同。在同步系统中,如SONET/SDH,系统器件同步到公共的系统时钟。在信号通过网络传送时,不同器件生成的抖动会通过网络传播,除非对器件中传送的抖动提出严格的要求,否则抖动可能会无限制地提高。在异步系统中,如千兆位以太网、PCI Express和光纤通道,器件定时由分布式时钟提供或从数据转换中重建的时钟中提供。在这种情况下,必须限制器件生成的抖动,但从一个器件转移到另一个器件上的抖动则不太重要。不管是哪种情况,底线是系统的工作性能如何,即误码率。
图2: 抖动大的眼图的交点,直方图是一个像素宽的交点块投射到时间轴上的投影
器件生成的固有抖动称为抖动输出。其主要来源可以分为两个:随机抖动(RJ)和确定性抖动(DJ)。可以把抖动看作从理想定时位置的、逻辑转换的定时变化,如图2中的直方图所示。这一分布显示了被不同抖动源模糊的理想定时位置。抖动分布是RJ和DJ概率密度函数的卷积。随机抖动源自各种随机流程,如热噪声和散粒噪声,其假设遵守高斯分布,如图3a所示。由于高斯分布的尾部扩展到无穷大,RJ的峰到峰值没有边界,而RJ的均方根则收敛到高斯分布的宽度上。
图3: 单个时点的抖动、正弦周期抖动和随机抖动相结合,导致误码的实例
Ideal Transition Edge: 理想的转换边沿
RJ Smeared Edge: RJ模糊的边沿
DJ Smeared Edge: DJ模糊的边沿
确定性抖动(DJ)包括占空比失真(DCD)、码间干扰(ISI)、正弦或周期抖动(PJ)和串扰。DCD源自时钟周期中的不对称性。ISI源自由于数据相关效应和色散导致的边沿响应变化。PJ源自周期来源的电磁捡拾,如电源馈通。串扰是由捡拾其它信号导致的。DJ的特色特点是,其峰到峰值具有上下限。DCD和ISI称为有界相关抖动;Pj和串扰称为不相关有界抖动;RJ称为不相关无界抖动。
识别不同类型的抖动来源,可以减少设计层次的问题,因为不同的器件以不同的方式生成抖动。例如,发射机主要生成RJ。外部调制的激光发射机生成的大多数抖动是由激光器和主参考时钟的随机抖动导致的。相反,接收机生成的绝大部分抖动是DJ,这源于导致ISI的前置放大器和后置放大器连接的AC耦合等因素。直接调制激光发射机受到RJ和DJ的影响。介质采用两种方式:光纤从色散中增加DJ,从散射中增加RJ;传导介质从有限带宽中增加DJ,与低频和多个反射相比,高频的衰减要更高。
很重要的一点是,要理解抖动分布是由所有抖动源的卷积赋予的。为直观地认识抖动,我们考察一下从‘0’到‘1’的逻辑转换,如图3b所示。标有‘x’的样点距理想转换边沿右面位周期的一半。现在,增加幅度为A的正弦DJ。在波的顶部,边沿从理想边沿朝着样点移动距离A。然后,根据高斯分布模糊边沿的位置,增加RJ。如果边沿移到样点的右面,那么逻辑‘1’码被错误地标为‘0’。在这种情况下,码边沿抖动经过样点的部分时间决定着BER。如果已知抖动原因,则可以计算BER。在本例中,抖动是RJ及PJ的一个来源,PJ移动边沿距离A及呈高斯分布的区域(图3a中的阴影部分),移到样点右面的概率决定着误码概率。这展示了RJ和DJ分布怎样一起卷积,即一种原因的效应叠加在另一种原因的效应之上,直到考虑了所有原因。
衡量系统功能的最终尺度是BER。抖动分析的目标是确定抖动对BER的影响,并保证系统BER低于某个最大值,通常是10-12。BER(T)由码型发生器、误码分析仪和系统时钟组成。数据发生器把码型传送到系统器件上。器件处理码型,把结果传送到误码分析仪,误码分析仪在已知码型上同步,计算收到的码数,确定哪些码接收错误,计算BER。图4是BER图,它是样点时间位置BER(t)的函数,这个图称为BERT扫描图或浴缸曲线,简而言之,它在相对于参考时钟给定的额定取样时间的不同时间t上测得的BER。参考时钟可以是信号发射机时钟,也可以是从接收的信号中恢复的时钟,具体取决于测试的系统。图4的时间轴与图1相同,两侧与眼图边沿相对应,样点位于中心。BER一定时,曲线之间的距离是该BER上的眼图张开程度。在样点接近交点时,抖动会导致BER提高到最大0.5。完整的BERT扫描测量是直接衡量BER一定时眼图张开程度的唯一方法。遗憾的是,完整的BERT扫描图需要很长的时间,如在5 Gb/s时需要30分钟。通过集中在眼图边沿进行部分BERT扫描,可以在几秒内,在10-15%的范围内保守地估算任何BER时的眼图张开程度。估算技术是一种近似方式,它对RJ和DJ概率分布去卷积,然后或多或少地使用高斯RJ,根据图3所示计算BER。关键在于,由于DJ有界、RJ是高斯分布,卷积的分布尾部在BER下限中遵守高斯RJ分布。从高斯分布中推导出的函数,称为互补误差函数,拟合到BERT扫描平滑的下降沿上。然后可以推断拟合的函数,直到任何BER值,以估算眼宽。
图4: BER(T)扫描或浴缸曲线,其中误码率是样点时间位置的函数
Bit Error Rati 误码率
Eye Width at BER = 10-12: BER = 10-12时的眼宽
Time, t, relative to the reference clock: 相对于参考时钟的时间t
等时取样示波器上显示的眼图由从多个不同逻辑脉冲上取样的数据组成。“轨迹”由参考时钟提供的触发之后的顺序时间上采集的数据点组成。显示的是一个两维直方图,如图1和图2所示。某个点上的颜色或亮度用来衡量该电压或功率上相对于触发信号的时间上发生的样点数量。取样示波器可以把一个像素宽的交点块投到时间轴上,构成眼图交点直方图(图2),测量抖动输出。眼图交点直方图近似计算信号抖动输出的概率分布函数。
在BERT扫描情况下,通过对RJ和DJ近似去卷积,可以从眼图交点直方图中估算BER,这基于这样一个事实,即在远离交点时,抖动分布主要取决于高斯RJ。把直方图的尾部与高斯分布匹配起来,提供了一个函数,然后可以在眼图中推断这个函数,并用来估算BER一定时的眼宽。数据集合和分析与高速取样时间间隔分析仪中基本相同。交点直方图拟合的宗旨与拟合BERT扫描的宗旨类似,但BERT扫描技术的速度和精度都要高得多。通过拟合直方图获得的某种高斯形状在一定程度上受到随机波动的影响;BERT扫描只取决于数据转换是否在样点上波动,而不取决于其波动的精确时间位置。因此,使用BERT进行测量要比低概率波动强健得多,后者的拟合可能会偏向交点直方图。部分BERT扫描的拟合速度要比交点直方图的拟合速度快得多,因为BERT数据集是在完整的数据速率上采集的,而直方图则是通过以低得多的速率对信号取样构建的。
对于高斯RJ能否精确地描绘交点直方图或BERT扫描的低BER的尾部,人们还存在争议。这种真正的随机流程会导致抖动,抖动遵守高斯分布并不存在问题,但这些流程可能并不是抖动分布尾部的主要因素。问题在于,多种小的效应之和,会构成接近高斯的分布。统计理论的中心极限定理体现了这一点:数量无穷大的小流程之和会遵守高斯分布。这意味着多个低幅度的DJ流程会卷积到一个仅在钟形曲线中心、而不是尾部接近高斯分布的分布函数。但是尾部才是高斯假设对估算BER最重要的地方。可能在某些情况下,真正的RJ只占似乎是高斯分布的抖动的一小部分。如果是这样,那么用来从拟合快速BERT扫描测量和直方图拟合中估算BER所使用的技术,可能会在总体上高估实际BER。尽管近似方法总是要小心出现错误,但在高斯分布没有很好地描述尾部时,它可能会迫使制造商设计的抖动余量超过必要的水平。幸运的是,通过以BER = 10-12的误码率水平执行全面的BERT扫描测量,进而可以把拟合技术与整个测量进行对比,检查这种情况并不难。
在抖动分析中,有两个不同的频域:时钟频率定义了时钟信号的额定交叉时间,抖动频率则是相对于额定交叉时间,时钟交叉的时间位置变化的频域。例如,周期抖动会导致时钟信号变化大约额定的时钟交叉量。结果,数据信号的抖动频率限于低于时钟频率的一半。
分析解调的抖动信号或相噪是一种强大的诊断技术。可以使用相位检测器解调相位,在频谱分析仪的抖动-频率域中或在示波器上的时域中进行分析。由于相位检测器只能解调时钟信号,要求专门的时钟恢复(CR)电路来分析数据信号。为把数据上的抖动传送到恢复的时钟中,而且没有失真,CR必须有:
1. 低抖动输出 – CR抖动提高了本底噪声,因为CR抖动的响应可能会干扰器件的抖动,而不能完全减去抖动响应;
2. 平坦的转函,这样抖动信号不会失真;
3. 带宽要足够宽,能够在相关的抖动-频段中传送抖动。
带宽标准限制着基于相位检测器的系统的分析范围。在SONET/SDH等应用中,数据恢复电路的带宽很好地界定了滚降频率,相位检测器电路可以设计成适合应用的带宽。
图5: 相噪频谱密度/单边带相噪图
图5是时钟信号的相位频谱密度:每个单位的抖动-频率带宽的均方相位变化。它等于单边带(SSB)功率频谱。在图5中,RJ提供了频谱中的连续背景,可以理解为闪烁、随机漂移和白噪声成分。通过分析相噪频谱,可以识别和分隔不同类型的DJ:在图5中,在低抖动-频率上,60 Hz拾波及其谐波上升到连续背景上方的杂散信号,大约2 kHz上的宽拐角是锁相环滚降点,5 MHz周围的PJ非常明显。通过在希望的带宽上求积分,可以从频谱中提取rms抖动。
通过使用具有专用相噪功能的频谱分析仪,还可以从时钟信号的频谱中提取SSB频谱。与相位检测相比,这种方法有两个系统问题。首选,频谱不能区分幅度噪声和相位噪声。低噪声、高带宽的限制放大器可以降低这种效应。第二,频谱分析仪的滤波形状允许载波附近的某些高幅度噪声泄漏出去。另一方面,使用频谱分析仪提取SSB频谱的优点是带宽高。因此,结合使用抖动频率带宽高达约100 MHz的相位检测器与具有覆盖最高时钟频率一半的相噪专用功能的频谱分析仪,可以提供一种强大的抖动诊断工具。
在较低的数据速率下(如B < 3 Gb/s),可以使用实时示波器捕获连续数据流的一个长段。数据集由段中每个数据转换的带有时间标记的交点组成。与取样技术或BERT扫描中的数据不同,数据可以在时域和抖动频率域之间来回变换。可以在抖动-频率域中识别确定性流程,与相噪分析技术相比,可以隔离时域中的效应,而相噪分析技术则测量功率频谱,而没有完整的合成幅度。但是,实时示波器上的抖动分析也有自己的缺点:数据集合的数字转换分辨率有限,数据段的长度受到示波器内存深度的限制。内存深度有限还具有矩形窗口效应,导致抖动频谱中窄的空信号,限制可以观察到的最低抖动频率。将不能分析周期长于捕获长度所发生的抖动效应。
在同步系统中,在通过系统传播时,抖动会在不同器件之间提高。抖动转函检定器件怎样作为抖动频率的函数传播抖动,可以用来理解器件的频响,而不管它是否是在SONET/SDH中指定的。规定幅度和频率的正弦抖动信号适用于传送到器件上的数据,将在应用的抖动频率上测量这些器件的输出抖动幅度,如基于相位检测的测试仪。抖动转函应小于或接近低抖动频率上的元素,其中接收机对抖动更加强健,而在规定的接收机滚降频率上,则要远远低于抖动频率上的单位。
抖动容限衡量接收机在不降低BER性能的情况下对抖动的容忍能力。它是用于器件的、导致相当于灵敏度降低1 dB的正弦抖动的幅度。在测试时,首先在没有增加抖动的情况下测量器件的BER,然后降低信号功率,直到误差始点或直到超过规定的BER。然后把信号功率提高1 dB,并增加正弦抖动,传送信号。得到的抖动幅度就是该频率上的抖动容限。容限要求符合一个模板,其中对低频幅度大,对高频幅度小。
SONET/SDH已经很好地定义了频带有限的抖动输出、转函和容限要求,但许多高速异步技术的抖动规范仍在发展。对发射机,10 GB以太网规范限制着发射机色散代价(TDP)。TDP是必须增加到色散链路中的发射机上的衰减水平,以把BER提高到非色散链路中的参考接收机的水平,其样点波动范围为5 ps。TDP是一种限制抖动输出的方法。对接收机,将执行受压眼图接收机灵敏度测试,检验接收机在接收可以允许的最坏情况信号时,能否在低于10-12的BER水平上运行。测试信号设计成模拟各种极限条件,包括RJ、DCD、ISI和PJ。与SONET/SDH中一样,抖动容限测试作为增加的抖动-频率的函数,但它还包括其它极限条件。
抖动测量的精度受到本底噪声和复现度的限制。本底噪声是系统生成的平均抖动,有时称为测试设备固定误差,取决于测量的带宽。噪声可能会波动到平均值以上,测量结果可能会波动到实际值之下,本底噪声和复现度相结合,决定着测试仪可以观察到的最低抖动。经验法则是可以观察到的最低抖动比本底噪声之上的复现度低两个单位。
不同的抖动检定方法具有不同的优点,其提供的结果可能很难比较,因为它们通常系统地测量不同的项目;但是,良好定义的一致性测试必须允许进行普遍比较。SONET/SDH是比较成熟的抖动标准,它可以在不同测试集合的本底噪声和复现度指标内部,比较单独的频带有限的抖动输出、转函和容限指标。但是,新兴技术中测试方法的激增,鼓励粗心大意地比较衡量不同数量的结果。例如,在BERT扫描中,从眼图张开测量中得到的总抖动完全不同于简单的峰到峰抖动测量。比较微妙的比较是把从BERT测量中推断得出的BER与BERT和取样示波器或TIA上测量的结果分开。在这两种情况下,通过拟合分布中BER低的尾部,可以近似地进行RJ/DJ去卷积,但去卷积近似计算中测量的系统不确定性,即外部效应和测得的分布之差很难量化。问题在于,测量结果的比较精度取决于其不确定性和所有不确定性,必须考虑所有不确定性,而不管是固有的不确定性(如本底噪声和复现度)还是相对的不确定性(如流程差异)。
在同步系统器件和异步系统器件中,在诊断方面,抖动测量的目标是识别导致错误的事件;在一致性测试方面,则是检验器件是否生成可以接受的误码率。在高速数据速率上检定抖动的基本方法有三种,即取样、实时相位检测和测量BER。取样技术可能会漏掉概率低的或瞬时的事件,但会在时域中有效地以可视方式表明系统性能;相位检测的频带有限,但在抖动-频率域中提供了杰出的诊断信息;误码率指标测试每个位,提供了基础的相关质量BER。各种标准正在不断发展,可以在整个眼图中迅速近似获得BER。在RJ占分布尾部主要部分的假设条件下,通过近似去卷积把RJ和DJ分开的这种常用方法是存在争议的,在更好地理解抖动来源和分布时,这种方法将向前发展。随着业内更详细地研究新兴技术,抖动分析技术和一致性测试要求将象此前的SONET/SDH一样趋于稳定和成功。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:电磁场的数字物理基础
下一篇:PCB布线是手动好还是自动好?(问题回答)
射频和天线工程师培训课程详情>>
