- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
高分辨率全帧CCD芯片FTF4027M的驱动电路设计
录入:edatop.com 点击:
本文所要设计的驱动电路是机载CCD相机上的前端驱动电路。机载CCD相机能够将拍摄的图像以数字的形式采集、存储和传输,并与地面实现实时通信,因此可以很好地克服传统光学相机的缺点。随着CCD器件的快速发展,CCD驱动时序的产生有很多种方法,比如可以采用数字集成电路、单片机、EPROM器件或可编程逻辑器件等来实现。本文采用CCD专用的数字集成芯片和单片机进行设计来实现CCD驱动电路。它的优点是结构设计简单、设计周期短、电路可靠性强。而高速时序脉冲产生芯片的运用又克服了单片机晶振频率低的限制,因此足以满足高速大面阵CCD的驱动时序要求。
1 系统总体结构
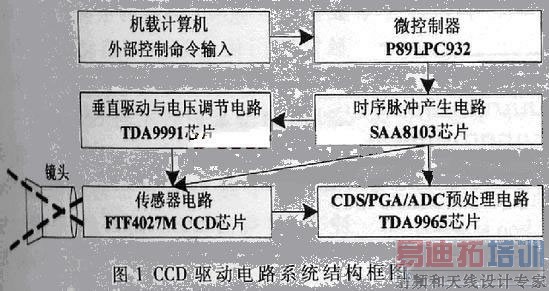
CCD驱动电路系统框图如图1所示,它以微控制器P89LPC932作为系统总的控制单元,在其控制下,SAA8103与TDA9991共同为CCD芯片FTF4027M提供所需的驱动脉冲和偏置电压,协调整个相机同步工作。CCD输出的信号是带有固定图像噪声和暗电流的模
拟信号,需要运用光学黑补偿箝位电路并通过相关双采样去除噪声干扰,然后进行可在控增益放大和模/数转换,这些工作由CCD专用的模拟处理芯片TDA9965来完成。输出的12位数字信号送给DSP以便进行进一步的数字图像处理。
2 FTF4027M的内部结构及驱动时序分析
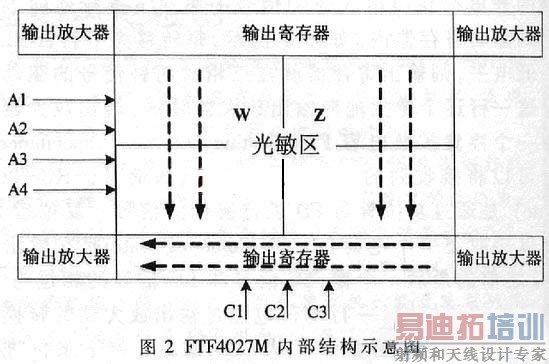
FTF4027M是一款1100万像素(4008×2672)的超大分辨率全帧CCD图像传感器。其内部结构如图2所示。该款芯片在结构上分为三部分,中间最大的区域为光敏区,即光积分区域;上下两部分为两个输出寄存器,将光积分生成的电荷水平转移到四个角的输出放大器,输出放大器将光生电荷形成的电压信号放大并转移出CCD。该款芯片的最大特点是将光敏区生成的图像分成W、X、Y、Z四个对称的角限,每个象限的电荷可以以不同的方向转移,通过四个输出端同时输出,有效地增加了帧速率,单端输出的帧速率为2帧/秒,而四端同时输出就可以达到7.5帧/秒。在本应用中,单端输出就可以满足系统设计要求,因此采用单端输出方式,电荷转移方向如图中虚线所示,A1、A2、A3、A4为垂直驱动时钟信号,C1、C2、C3为水平移动时钟信号。
CCD的帧转移时序图如图3所示。SSC为系统内部基准时钟信号,用于校准整个CCD的时序;CR(Charge Reset)为CCD的电荷复位信号,相当于电子块门信号;Trig-in是CCD的外部触发信号,用于控制CCD光积分的起始和结束;VA-high是控制四相A时钟的高低电平转换的信号;TG是光敏区与输出寄存器之间的隔栅,TG信号的相位和频率与A1完全一致。整个帧时序分为三个阶段,这三个阶段是循环进行的。把空闲模式阶段定义为第一阶段,在CCD空闲模式下,A时钟信号全部保持低电平。空闲模式后,CCD开始进入第二阶段,即光积分阶段,A1继续保持低电平,A2、A3、A4上升为高电平。因为CCD中的每个像素都可以看作是由四个栅极(每个栅极上连接一相时钟信号)“覆盖”的,而且像素之间必须分离开,水平方向上可以通过沟道隔离像素。为了将像素与像素在垂直方向上隔离开,必须将四个栅极中的某一个栅极电压变为0。
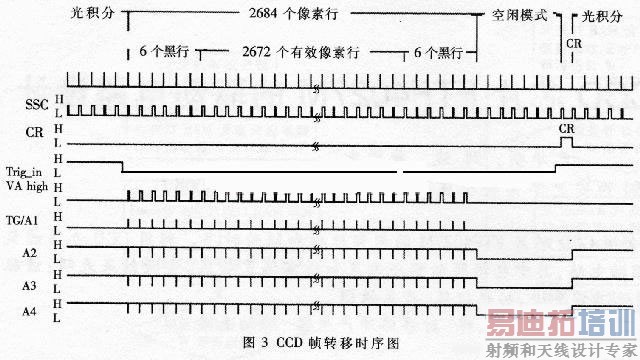
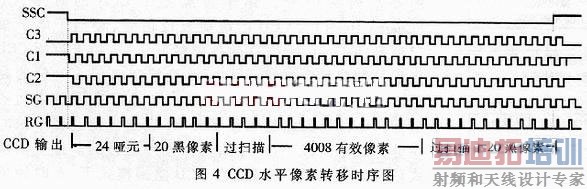
在本应用中,将A1保持低电平以起到像素隔离的作用而光生电荷则在保持高电平的A2、A3、A4的栅极下积聚起来,形成信号电荷包。光积分结束后进入第三阶段,即帧转移阶段,而帧转移又可以看成是垂直行转移和水平像素转移交替进行的,它们之间的交换转换是通过SSC电平的高低转换实现的。在SSC保持高电平时,光敏区里已经生成的光电荷在四相A时钟信号的驱动下逐行地向下转移到输出寄存器的。如图4所示,每转移完一行,SSC变为低电平,则输出寄存器就在三相C时钟信号的驱动下将这一行逐个像素地向输出放大器转移。输出放大器内有一个浮置扩散电容FD(Floating Diffusion Capacitance),它可以将接收到的电荷包转换为电压信号。
R G(Reset Gate)是通过复位管对FD进行复位的信号,复位后FD可以接收下一个电荷包。SG(Summing Gate)是在输出栅OG之前的最后一个栅,SG信号和RG信号的相位与C3信号的相位相同。一行电荷包经过输出放大器的转换和放大后以电压信号的形式从CCD输出,接下来再进行下一行的垂直行转移和水平像素转移输出,直到光敏面上的所有2684行电荷包输出完毕为止。由此可见,整个一帧图像是在A时钟信号和C时钟信号的交替驱动下从CCD输出而完成帧转移的。
3 系统设计
由于本系统中采用的芯片都是CCD专用的芯片,因此硬件电路设计相对简单一些,主要工作是软件设计。本系统内部的微控制单元为P89LPC932型单片机,它是一款高性能、低功耗、高速度的小封装微控制器,内带I2C控制器。SAA8103也是一个I2C器件,内部有一个寄存器,专门用来保存设定的CCD驱动脉冲和偏置电压的工作参数烧写到单片机的Flash程序存储器中,然后将这些参数在系
统上电后通过I2C总线传输到SAA8103的
寄存器内,再通过三线串行总线为TDA9965和TDA9991进行设定和控制,从而让CCD在最佳的状态下与后续图像处理和图像传输单元协调工作。
3.1 CCD所需的一些偏置电压
①VNS:加到CCD的N型基底上的电压,电压范围从22V到28V,主要用于控制CCD的高光行为(Antiblooming抗晕)。为了实现电荷复位功能,CR脉冲必须加到VNS上,这个电荷复位脉冲的主要功能是将CCD上已经积累好的光生电荷全部移除,这在CCD新的光积分循环开始时是必须的。
②SFD:加到CCD的输出放大器上的直流电压。
③RD:加到复位管(Reset Fet)上的直流电压。
④OG:连接SG和浮置扩散电容的输出栅上所加的电压。
⑤VPS:加到P掺杂基底上的电压。
3.2 CCD所需的驱动时序的设置
3.2.1 快门及光积分的控制时序
本款CCD属于全帧CCD,光敏面占CCD面积的大部分,为了得到100%的无污染点图像,必须加上机械快门。如图3所示,机械快门的开启由Trig-in信号完成。当Trig-in信号的上升沿到来时,触发快门使之进行开启动作,CCD准备进行光积分。在Trig-in信号上升沿之后,当基准时钟信号SSC的第一个上升沿到来时产生一个脉冲信号CR,用于对CCD进行初始化,CR脉冲宽度等于SSC的一个周期,为190.6μs。在SSC的下一个上升沿到来时,产生CR下降沿,这时快门彻底打开,CCD正式进入光积分阶段。当Trig-in信号的下降沿到来时,CCD光积分结束,同时触发机械快门使之进行关闭动作,在一个SSC周期的时间之后,快门完成关闭,然后再在SSC的上升沿到来的开始进行帧转移。因此机械快门的开启和关闭的动作总是落后于控制信号,这样就避免了在快门打开阶段就进行光积分,导致有用信号的丢失,也避免了因快门未完全关闭就开始进行帧转移而引起的图像噪声干扰。通过设置CR信号下降沿到Trig-in下降沿这段时间来控制光积分,也就控制了水平常说的电子快门速度。
3.2.2 垂直行转移的驱动时序
该时序涉及A1、A2、A3、A4、TG,其频率都为50kHz。SSC上升沿到来时标志着一次水平像素转移的结束和一次垂直行转移的开始,可通过控制四相A时钟信号的高低电平转换来完成。四相A时钟信号要满足严格的交迭原理,占空比为5:8,即五个单元的高电平和三个单元的低电平,所以相邻时钟信号之间的延迟为二个单元。A时钟信号的高电平有两个水平,分别用于CCD的不同工作状态,垂直转移状态的高电平要保持在14V,而光积分和保持状态高电平要保持在10V。TDA9991中集成了一个电平控制单元,可以完成对A时钟信号的电平控制。而在电平像素转换期间,A1必须继续保持低电平,A2、A3、A4保持高电平,从而保证光敏面中的未输出信号继续保持在A2、A3、A4电极之下。
3.2.3水平像素转移的驱动时序
该时序涉及C1、C2、C3、RG、SG,其频率都为25MHz。SSC下降沿到来时标志着一次垂直行转移的结束和一次水平像素转移的开始,转移原理和行转移原理一样,三相C时钟信号要严格满足三相交迭原理,占空比为3:6,也就是高低电平保持时间一样。在电荷由光敏区向输出寄存器转移的过程中(见图4),在SSC下降沿到来之前,C3应该保持低电平,使像素在输出寄存器的隔离开来,而C1和C2应该保持高电平,使转移下隔断的电荷在这两个电极之下积聚起来,为下一步的水平转移输出作准备。
4 实验与讨论
系统设计完成后,根据CCD的时序村注,经仿真调试可以产生出相应的驱动脉冲和偏置电压。但是由于系统的后续图像处理和传输部分还没有设计好,所以无法进行图像采集。该驱动电路的研制结果表明,采用现在芯片进行系统设计有它自身的好处,可以简化设计,而且调试简单、可扩展性也比较强。
上一篇:单电源、低功耗的可编程窗口检测器
下一篇:FPU加法器的设计与实现

