- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
用LTB技术改善多相直流转换器的响应速度
录入:edatop.com 点击:
高性能微处理器需要具有快速瞬态响应的低压大电流供电系统。因此,交织多相同步降压转换器作为这些微处理器的电压整流模块(VRM)获得广泛应用,因为它们允许在小信号条件下采用更快速的系统控制器,可以减少输出电压纹波、降低输入/输出电容的成本。不过,在具有很大和快速的负载变化期间,交织相移会影响输出电压。
在与输出功率相关的交流变量基础上对系统稳定性和小信号行为的研究结果表明:系统的状态变量是流经等效电感的总电流和输出电容上的电压降。多相交织系统可以用这些变量完全表征,并等效于只有一个单相位的DC/DC转换器,其中,线圈可以被并联的全部电感(等效电感)代替,等效开关频率是单相开关频率的N倍(N是相位的数量)。
由这种模型可以看出,为什么用比单相系统更高的误差放大器斜率(GBWP)可以实现更快的控制系统。当然,这样做还有助于保持输出电压的稳定,即使在负载瞬变时也能很好地得到稳压。然而,最近的CPU电气规范中负载瞬变速率已经高达1200A/us(50ns为100A),使得控制系统几乎不可能及时响应这种陡峭的变化。结果是中频以上输出滤波器电容的成本上升,例如22uF多层陶瓷电容(MLCC)。
动作延时
目前使用的控制器一般要么是上升沿架构要么是下降沿架构,每种架构都有各自的优缺点。采用下降沿控制架构的控制器在每个时钟周期的开始打开,这种控制器可以响应控制器打开时发生的任何瞬态事件。然而,如果瞬态事件发生在控制器关闭期间,那么它必须等到下一个时钟周期才能做出响应。而采用上升沿架构的控制器在每个时钟周期内是关闭的,这种控制器可以响应在它关闭时发生的瞬态事件,但必须等到下一个时钟周期才能响应这种控制器打开时发生的瞬态事件。在这两种架构中,一般都会在PWM比较器的输出端放置一个锁存器,用以在响应瞬态事件时建立一个周期的延迟。
双沿调制器在判断何时打开或关闭时不受时钟周期的约束,打开信号取决于误差信号。同样地,误差信号会通知控制器何时关闭。这种架构再加上快速输出反馈即可允许所有相位同时响应瞬态事件。虽然基本的双沿调制器可以改善系统性能,但很重要的是还能解决引入系统响应延迟和妨碍理想瞬时响应的其它架构问题。如果将“动作延时(action delay)”看作是从控制器识别负载瞬变的发生到命令接通所有上边(highside)功率MOSFET的时间,那么对这一延时的影响因素至少有以下几种:
1. 遥测(Remote sense)用来以完全差分的方式检测CPU上的电压,采用运放实现。运放引入的延时Trb=1/GBWPrb(Trb=100ns),其中GBWPrb在10MHz左右。遥测放大器必须从反馈路径中移除,这可以通过只检测远端内核地(core ground)实现,这样会损失高频共模抑制比(CMRR)。图1是传统的远端缓存连接,这里的远端缓存会引入延时Trb,因为它位于反馈路径上。图2所示的遥测是在反馈路径外实现的,因此Trb=0。
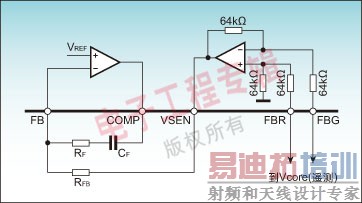
图1:全差分CPU遥测,采用传统远端缓存连接
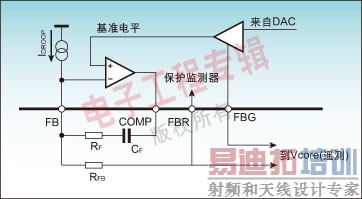
图2:CPU地遥测,这是在反馈路径外实现的
2. 与纯粹的双沿架构相比,采用锁存器的双沿实现方案会降低系统响应速度,不能发挥双沿架构的优势。为了充分发挥双沿架构的优势,系统中必须取消时钟和锁存器。然而,以成本为主导的解决方案受内嵌功率MOSFET驱动器的控制器的控制。这些驱动器会在每个开关边沿产生噪声,从而降低模拟前端的抗噪声能力,冒很大的抖动风险。限制基底噪声的方法有好几种,如精确的IC设计、噪声隔离的硅组件等。这些方法中有两种具有较大的PWM斜坡(ramp)和锁存PWM脉冲(latched PWM pulse)。
锁存双沿PWM调制器有很强的抗噪声性能,但它会产生正比于开关周期的长动作延时Ta。当然也取决于负载瞬变发生的时刻。
在锁存式双沿PWM调制器中,最长的动作延时发生在下边功率MOSFET接通时负载瞬变发生的时刻。约T/2的动作延时是可能的,其中T为开关周期。没有锁存器的双沿调制器可以极大地改善消除Ta后的动作延时。
3. 误差放大器本地环路必须在负载瞬变发生时避免急剧的输出电压下降。这样控制环路可以忽略PWM斜坡,强迫所有的PWM脉冲为“1”,从而同时接通上边的功率MOSFET。此时要求控制电压处于饱和状态。为了产生误差放大器饱和状态,需要在反馈网络中插入电容Cp,如图3所示。
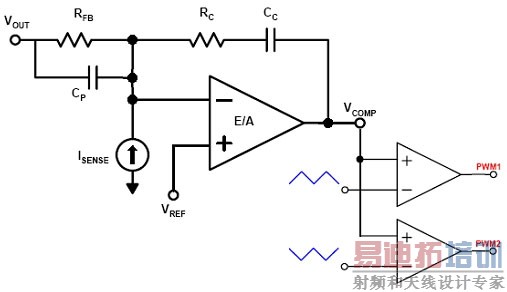
图3:负载瞬变时的COMP饱和
Cp为控制电压(COMP)提供了导数分量(derivative component)。大的Cp电容可以使COMP更快饱和,很容易高于PWM斜坡电压,但会使系统变得不稳定,或可能产生抖动(因此增大输出电压纹波需要更多输出电容)。如果Cp很小,系统虽然稳定了,但COMP电压可能不会上升到高于PWM斜坡电压足够高的位置,这是一个存在的风险。
无论如何,将控制电压推高到高于PWM斜坡电压的时间取决于PWM斜坡有多高、GBWP有多少。通常斜率为10V/s、PWM斜坡电压为2V。斜率产生的延时Tsr=200ns。通常在数据表中斜率(和GBWP)很难得到保证,因为它可以扩展得非常大。这种扩展使得这部分动作延时不可预测。
Cp的值必须认真选择,需要考虑到即使在最坏的斜率情况下(甚至不知道),COMP电压也会上升到高于PWM斜坡电压。Cp的增加会产生抖动(增加输出电压纹波),使系统变得不稳定。稳态状况需要在负载瞬变过后很长一段时间才能恢复。
就Cp的选择也有个矛盾之处:选择Cp时需要考虑即使在最坏斜率情况下COMP电压也能高过PWM斜坡,但Cp值也会设置负载瞬变后转移的能量值。过高估计Cp会给输出带来太多的能量,从而产生较大的回铃(ringback)电压并增加稳态的恢复时间。新一代非线性控制响应可以解决这个问题,它能取消延时Tsr,极大地改善盒状内核电压响应特性。
4.电源驱动器是控制器决策的硬件变换器(transducer)。电源驱动器能够以最小的延时执行命令非常重要。该延时等于T1和T2之和,其中T1代表切断下边功率MOSFET和接通上边功率MOSFET之间的时间,T2是向驱动器本身传送逻辑命令所需的时间。
具有嵌入式驱动器的控制器通常能减少这一延时,因为它们没有T2。该延时来自控制器内很低速的数字缓存以及控制器与外部驱动器之间的大走线电容。通常商用控制器的数字缓存具有约1kΩ的饱和驱动电阻,而5英寸左右的走线电容约为100pF,因此可以得出T2≈100pFx1kΩ=100ns。
延时T1是驱动器内部延时与Tfall下边和Trise上边时间的总和。T2延时可能是100ns,T1也可能是100ns。
在了解这些延时参数后,在表1中我们比较了几个主要的延时参数。动作延时有多个贡献因素:Trb、Ta、Tsr、T1+T2。下面介绍如何减少除了Tsr以外的所有这些因素,同时也会介绍与没有锁存器的纯双沿调制器相关的所有考虑因素。

表:主要的延时参数值比较
LTB技术可以解决这些问题并消除Tsr
负载瞬态提升(Load Transient Boost, LTB)使用的“负载瞬态传感器”是一种能在dv/dt超过内部门限时给出尖脉冲的电路。该电路的灵敏度可以通过改变与LTB引脚连接的外部网络进行设置。该传感器可以识别加载负载和断开负载两种瞬变情况。
如图4所示,当发生负载瞬变时(加载负载),“加载PWM斜坡电压”输出端的电压(红色)被设置为双沿PWM斜坡的下层基值,从该值开始形成斜率为m的斜坡;当负载断开时,“负载断开PWM斜坡电压”的输出端的电压(蓝色)被设为双沿PWM斜坡电压的上层基值,从该值开始形成斜率为m的斜坡电压。
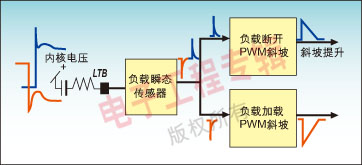
图4:负载瞬态提升方案
如图5所示,每个负载加载断开PWM斜坡再与COMP进行比较,产生正确的PWM脉冲,其脉冲宽度代表了系统需要的正确能量值。而误差放大器将继续在“小信号”条件下工作。
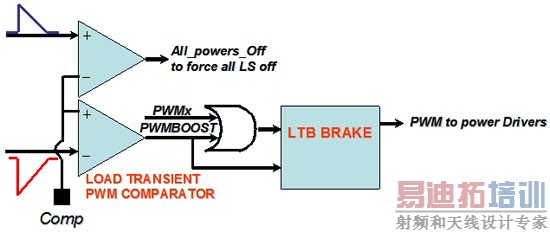
图5:负载瞬态提升控制
负载断开时,上述脉冲会切断所有功率MOSFET,特别是下边的功率MOSFET。这样可以极大地改善输出电压响应。加载负载时,名为“PWMBOOST”的脉冲将与每个PWM脉冲在每个相位进行“或”操作。“或”操作可以取消交织相移,并传送误差放大器要求的正确数量的能量。“LTB BRAKE”是一种数字滤波器,可以跳过最接近的交织PWM脉冲,直接到PWMBOOST。这款滤波器能够显著地提高输出电压响应。
与LTB技术相关的动作延时有几个ns:它直接以数字方式动作,对交织相移进行复位。这一延时主要是由传感器比较器引起的(约10ns)。因此LTB技术可以将Tsr从100ns减少到10ns,并且最重要的是它能使系统对没有保证的参数扩展不敏感。它还使得系统更“线性”,因为LTB传送的能量是直接由误差放大器控制的。
当所有上边功率MOSFET导通从而增加电感电流时,整个电荷被用来在动作延时(AD)时间内保持输出电压。这意味着只有MLCC电容(通常为90%)才能提供输出电压,因为总的MLCC电容的等效串联阻抗(ESR)远小于总的大容量(bulk)电容(即15×10uF MLCC的总ESR为0.16mΩ,而4×560uF大容量电容的总ESR为1.5mΩ,比率为1:10,因此所需电荷的90%由MLCC电容提供)。
可以根据AD计算得出在负载瞬变ΔIo和时间长度To后至少需要多少MLCC电容才能保持输出电压在给定的电压下降ΔVout内。动作延时后电感电流增加TL,其中:

在式中,L=电感值;N=相位数量;Vin=多相输入电压;Vo=输出电压。根据几何公式计算可以得到:

该电荷的90%由MLCC维持,而10%由大容量电容提供,因此可以得到:

因此,与动作延时直接相关的MLCC电容的数量就变得非常重要,因为它们直接与成本有关。
仿真与实验结果
仿真结果的依据是以下材料清单和规范:
1. 带Intel socket 775的BTX母板模型;
2. 带嵌入式驱动器和位于反馈路径外的遥测电路的N=3相交织控制器;
3. 开关频率为450kHz;
4. 在To=50ns内负载瞬变范围为15A到65A(ΔIo=50A);
5. 电感L=200nH、DCR为0.5mΩ;
6. 大容量电容Oscon 4×560uF,ESR为6mΩ;
7. MLCC电容15×10uF和3×22uF;
8. 系统输出阻抗(固定偏差)Rd=1mΩ;
9. 每相上边1×STD55NH30LL;
10. 每相下边1×STD95NH30LL;
11. 输入电压Vin=12V;
12. 输出电压Vo=1.4V;
13. 输出电压纹波<10mVp-p。
仿真结果很好地表明了交织相移如何被取消的。当交织相移为零时,输出电压由MLCC电容维持,最重要的是22uF的MLCC电容。为了去除任何回铃或过多的传送能量,LTB Brake机制可减少流进三个电感中任一个的电流。因此,输出电压具有真正的输出阻抗(盒状波形)。4~5us后轻微的下冲是控制环路恢复稳态状况所需的时间,它与系统的总GBWP和电流共享环路增益有关。在这个低频点,系统还对大容量电容的数量敏感。
如果采用公式1、2和3以及早前所述的电气规范,可以得出:ΔVout =Rd×ΔIo=1mΩ×50A=50mV;TL=314ns;ΔQ =12uC;CMLCC =216uF。该等效电容对应于15×10uF和3×22uF。
在负载断开时,LTB脉冲切断所有功率MOSFET。这一功能可以减少输出大容量电容的额外电荷,因为电感电流的斜率从Vo/L到(Vo+Vd)/L有了很大的提高,其中Vd是下边功率MOSFET的体-漏二极管电压降。该功能还能避免负电流流进电感,从而取消输出电压反向回铃。
实验测量结果是利用第一款实现LTB技术的商用产品获得的。该产品现在是ST公司的L6713A,L6713A首次采用了完整的机制来减少动作延时、反馈路径外的遥测、异步双沿调制器、LTB技术和嵌入式驱动器。该器件可以采用2个或3个交织相位,适合Intel的VR10.x、VR11和AMD的K8-F处理器使用。
实验结果与仿真结果的相同材料清单和相同规范有关。少量的回铃来自于建模不完善的母板寄生效应。基于上述原因,输出电压尖峰也要高于仿真结果。加载负载和断开负载时的响应时间(恢复稳态状况所需的时间)对仿真和实验测量来说是相同的。
作者:Osvaldo Zambetti
资深设计师
Alessandro Zafarana
设计经理
工业和功率转换分部
意法半导体公司
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
