- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
分析基于dsPIC30F的数字电源的设计与制作
录入:edatop.com 点击:
重要硬件: 基于dsPIC30F系列MCU
控制板电源:反激式开关电源,输出4组独立电源
驱动形式:采用250功率驱动光藕,+15V,-3.3V负电压
可驱动IGBT:MOSFET
输出方式:单级性,H桥工频变压器输出。
反馈方式:交流采样反馈。
软件设计: 采用SVPWM,单相空间矢量调制,优化开关控制时序。
控制思想: 内模重复控制原理+电压定时滞环+PI控制技术。
设计结果: 基本无频率误差,空载和满载电压相差不超过2%,空载和满载顺间转换电压相差不超过2%,并能在2个周期内定。
以上是带阻性负载的波形.下图是电压滞环的控制波形.
同时也做了一个实验
经过系统的初步测试,电压重复控制原理对于电压波形的失真有较好的补偿作用. 并且静态跟随精度高,动态响应快,不失为是一个比较理想的数字电源平台. 当然主芯片可降为30F2020,保持30MIP的运算速度,但价格可以做到20元重复控制用于逆变器的波形校正时,它的基本思想是假设前一个基波周期中出现的 波形畸变将会在下一个基波周期的同一时间重复出现,在此假设条件下,控制器 根据每个开关周期给定信号与反馈信号的误差来确定所需的校正信号,然后在下 一个基波周期的同一时间将此信号叠加到原控制信号上,以消除以后各基波周期 中将出现的重复畸变.因此,重复控制只对产生波形畸变的周期性扰动有抑 制作用,但对非周期性扰动却不能抑制.然而实际中,产生逆变器波形畸变的扰动 大部分都是周期性的,死区与负载所产生的扰动就是周期性扰动,因此重复控制 技术可以同时对死区与负载引起的波形畸变有较好的校正作用.现在还没有带大 量的感性负载做试验,把重心转移到解决目前困绕我的前级问题。
硬件上的问题
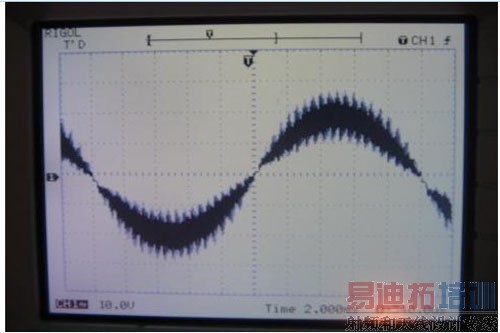
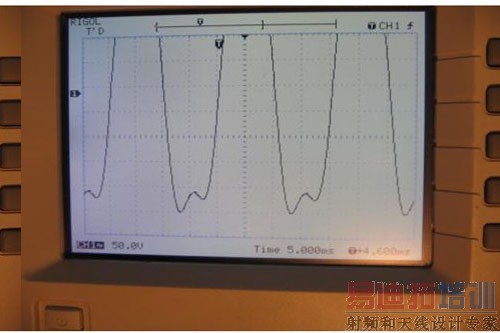
本16位数字电源平台直流母线电源,采用60V直流供电. 但是做一个可变频的、高性能大功率电源,前级需要高功率因素的PFC电路.并且,要得到60V的直流电压,需要采用3525全桥软开关变换来得到. 这个是目前遇到的一些困难.希望同行指点一下意见!!同时也做了一个试验,在50HZ的基波上叠加150HZ的3次谐波, 谐波幅值为基波的10%.下图为输出波形,表明滞环跟踪良好.。
控制板电源:反激式开关电源,输出4组独立电源
驱动形式:采用250功率驱动光藕,+15V,-3.3V负电压
可驱动IGBT:MOSFET
输出方式:单级性,H桥工频变压器输出。
反馈方式:交流采样反馈。
软件设计: 采用SVPWM,单相空间矢量调制,优化开关控制时序。
控制思想: 内模重复控制原理+电压定时滞环+PI控制技术。
设计结果: 基本无频率误差,空载和满载电压相差不超过2%,空载和满载顺间转换电压相差不超过2%,并能在2个周期内定。

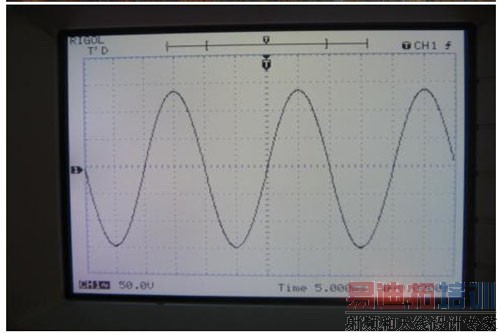
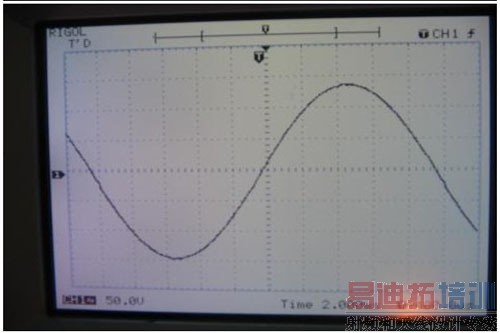
以上是带阻性负载的波形.下图是电压滞环的控制波形.
同时也做了一个实验
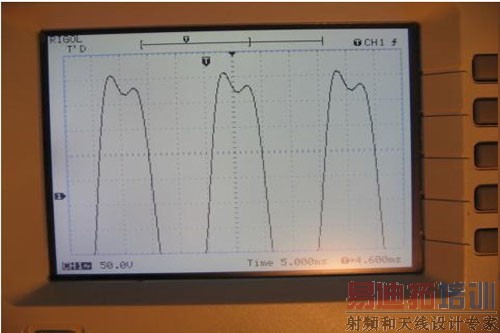

经过系统的初步测试,电压重复控制原理对于电压波形的失真有较好的补偿作用. 并且静态跟随精度高,动态响应快,不失为是一个比较理想的数字电源平台. 当然主芯片可降为30F2020,保持30MIP的运算速度,但价格可以做到20元重复控制用于逆变器的波形校正时,它的基本思想是假设前一个基波周期中出现的 波形畸变将会在下一个基波周期的同一时间重复出现,在此假设条件下,控制器 根据每个开关周期给定信号与反馈信号的误差来确定所需的校正信号,然后在下 一个基波周期的同一时间将此信号叠加到原控制信号上,以消除以后各基波周期 中将出现的重复畸变.因此,重复控制只对产生波形畸变的周期性扰动有抑 制作用,但对非周期性扰动却不能抑制.然而实际中,产生逆变器波形畸变的扰动 大部分都是周期性的,死区与负载所产生的扰动就是周期性扰动,因此重复控制 技术可以同时对死区与负载引起的波形畸变有较好的校正作用.现在还没有带大 量的感性负载做试验,把重心转移到解决目前困绕我的前级问题。
硬件上的问题
本16位数字电源平台直流母线电源,采用60V直流供电. 但是做一个可变频的、高性能大功率电源,前级需要高功率因素的PFC电路.并且,要得到60V的直流电压,需要采用3525全桥软开关变换来得到. 这个是目前遇到的一些困难.希望同行指点一下意见!!同时也做了一个试验,在50HZ的基波上叠加150HZ的3次谐波, 谐波幅值为基波的10%.下图为输出波形,表明滞环跟踪良好.。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:反激电源及变压器设计宝典
下一篇:台达UPS地铁弱电系统解决方案
(1)
射频和天线工程师培训课程详情>>
