- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于MATLAB的线性二次型最优控制
录入:edatop.com 点击:
0 引言
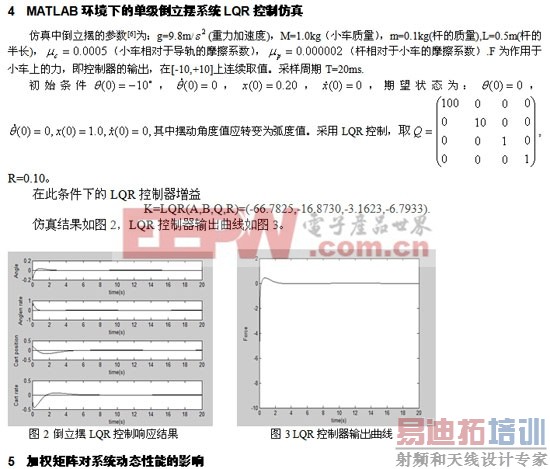
倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统。在控制过程中,它能有效地反应控制理论中诸如系统稳定性、可控性、鲁棒性、系统收敛速度、随动性以及跟踪等问题,是检验各种控制理论的理想模型。线性二次型最优控制(Linear Quadratic Regulator,LQR)问题在现代控制理论中占有非常重要的位置,其优势在于控制方案简单,超调量小,且反应速度快,该方法不仅对单级倒立摆系统能够进行有效控制,且已经成功的应用于直线双倒立摆[1]和双足机器人的控制[2]。
本文针对单级倒立摆系统,完成了具体的系统建模及LQR控制的MATLAB仿真,通过增加系统自身的扰动及改变LQR控制器中加权阵R,对比仿真,得到了良好的控制效果。
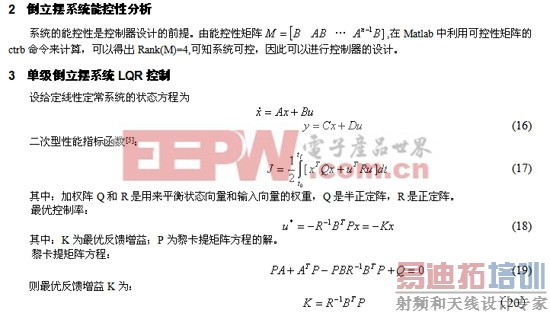
1 单级倒立摆建模
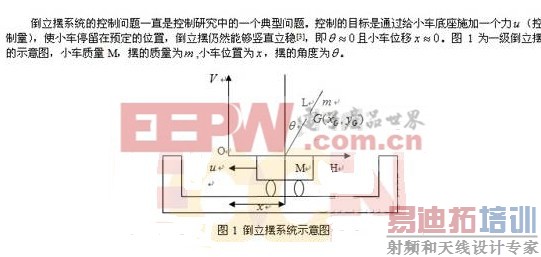
实际的单级倒立摆系统比较复杂,除了各组成器件的非线性外,还受到各种干扰,为分析其本质,需要对实际系统进行简化[4]。简化约束条件如下:
(1) 将摆杆视为质量均匀分布的刚体细杆;
(2) 各部分的摩擦力与相对速度成正比;
(3) 施加在滑块上的驱动力与加在功率放大器上的输入电压成正比,并无延时地加到滑块上;
(4) 出皮带轮与传送带之间无滑动,传送带无延长现象;
(5) 除滑块与导轨之间的摩擦及摆杆转轴的摩擦外其它摩擦及阻尼的影响均忽略。
[p]
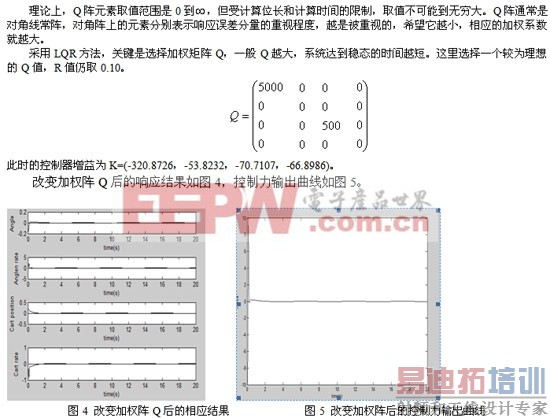
对比仿真结果可以看出,当小车摆杆角度权重选定为合适的值,随着小车位置权重的增加,小车位移系统阶跃响应超调减小,上升时间和调整时间也加快。与此同时,也引进了一些振荡。
5.2 加权矩阵R的研究
从降低控制系统能量要求优先角度出发,让Q不变,R减小。这时由Riccati方程求得的系统反馈增益阵K增大。例如R=0.01时,相应的K=[-175.4699,-46.1765,-10.0000,-20.8841]。
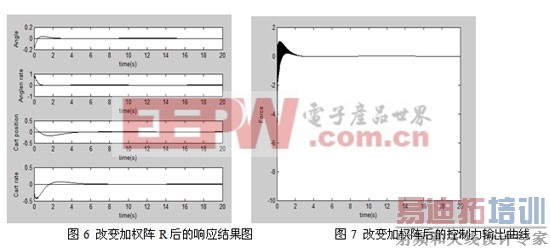
改变加权阵Q后的响应结果如图6,控制力输出曲线如图7
对比仿真结果可以看出,调整时间与超调量减小,上升时间与稳态误差减小。但是系统稳定性很差,时控过程噪声很大。
6 结束语
本文针对倒立摆系统进行数学建模,采用最优控制中的LQR控制方法,对系统进行局部的线性化,通过仿真实验得到该方法作用于倒立摆系统是可行且有效的,同时分析了加权矩阵Q和R对系统性能指标的影响。
参考文献:
[1] 刘金亨,陈今润,吕郁青,等. 基于LQR的一阶直线双倒立摆最优控制系统研究[J].自动化技术与应用,2009,28(5):11-13.
[2] 槐创锋,方跃法. 5连杆双足机器人建模和控制系统仿真[J].系统仿真学报,2008,20(20):82-86.
[3] 李德毅,杜鹚. 不确定性人工智能[M].北京:国防工业出版社,2005.
[4] 姜春瑞. 基于云模型理论的一阶直线倒立摆控制技术研究[D]. 哈尔滨工业大学,2005.
[5] 刘豹. 现代控制理论[M]. 北京:机械工业出版社,2007.
[6] 刘金琨. 先进PID控制及其MATLAB仿真[M]. 北京:电子工业出版社,2003.1.
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
